1.本发明属于流体计算领域,具体是关于一种低速旋转飞行器的滚转阻尼力矩系数计算方法。
背景技术:
2.对于低速旋转飞行器,滚转阻尼力矩系数是其重要的一项气动参数。当飞行器绕其纵轴旋转时,将产生滚转阻尼力矩,该力矩总是阻止飞行器绕其纵轴旋转,分析飞行器转速时,滚转阻尼力矩是必不可少的因素,因此需要获取滚转阻尼力矩系数。
3.目前,工程应用中获取滚转阻尼力矩系数的方法主要有两类:一是对飞行器进行风洞试验,二是基于cfd(computational fluid dynamics)计算流体力学,通过数值仿真计算获得,通过风洞试验获取飞行器的滚转阻尼力矩系数,需要将飞行器的气动模型放置风洞中,对其进行吹风和测力获取飞行器的气动参数,当飞行器在滚转状态下吹风,将获得滚转阻尼力矩系数,该试验方法成本较高且试验流程复杂,不利于广泛用于分析低速旋转飞行器的转速特性;基于cfd计算流体力学通过数值计算获得飞行器的滚转阻尼力矩系数,该方法试验成本较低,且实现过程相对简单,通过对飞行器建模,可基于数值计算获取飞行器的滚转阻尼力矩系数气动参数,可广泛用于分析低速旋转飞行器的转速特性。
技术实现要素:
4.为了解决背景技术中问题,本发明公开一种低速旋转飞行器的滚转阻尼力矩系数计算方法,有效计算给定条件下的飞行器滚转阻尼力矩系数,提高计算效率。
5.为实现上述发明目的,本发明采用下述技术方案:
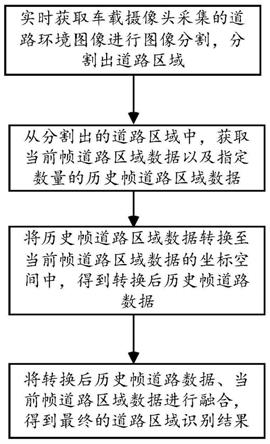
6.一种低速旋转飞行器的滚转阻尼力矩系数计算方法,包括下述步骤:
7.第一步,进行飞行器的三维建模;
8.第二步,进行飞行器流体域的创建;
9.第三步,进行流体域网格模型划分;
10.第四步,设定流体域计算条件;
11.第五步,进行指定条件下飞行器滚转力矩系数m
x
计算;
12.第六步,编写用户自定义函数udf函数,在定轴转动情况下,强迫运动方程为γ(t)=γ0 asin(wt),式中,γ为滚转角,γ0为初始滚转角,a为运动幅值,w为运动角速度,上述运动方程对时间的导数为:
13.即为飞行器滚转运动函数;
14.第七步,通过fluent软件对第六步飞行器滚转运动函数进行编译和调用,进行飞行器滚转阻尼力矩系数c
lp
计算。
15.所述低速旋转飞行器的滚转阻尼力矩系数计算方法,第一步,进行飞行器的三维建模,所述飞行器绕其纵轴低速旋转,转速<30r/s。
16.所述低速旋转飞行器的滚转阻尼力矩系数计算方法,第二步,进行飞行器流体域
的创建包括,设定流体域为球体,球体半径等于20倍飞行器长度。
17.所述低速旋转飞行器的滚转阻尼力矩系数计算方法,第三步,进行流体域网格模型划分包括,采用非结构网格,设定网格模型边界层为20层。
18.所述低速旋转飞行器的滚转阻尼力矩系数计算方法,第四步,设定流体域计算条件包括,设定求解器为密度基,设定湍流模型为k-epsilon模型,设定流体域材料属性为理想大气模型。
19.所述低速旋转飞行器的滚转阻尼力矩系数计算方法,第五步,进行指定条件下飞行器滚转力矩系数m
x
计算,指定条件是飞行器速度<3ma,攻角<30
°
,侧滑角<30
°
。
20.所述低速旋转飞行器的滚转阻尼力矩系数计算方法,第七步,进行飞行器滚转阻尼力矩系数c
lp
计算,包括,
21.滚转力矩系数:
22.飞行器在定轴滚转情况下,设运动方程为:
23.γ(t)=γ0 asin(wt)
24.其中,γ为滚转角,γ0为初始滚转角,a为运动幅值,w为运动角速度;
25.将运动方程对时间求导:
26.当γ=γ0时,
27.同时,飞行器的滚转角速度
28.设其中d为飞行器直径,v为飞行速度、w为运动角速度,
29.则
30.当n=0,2,4,...时,
31.m
x
表示滚转力矩系数的波峰值,滚转力矩系数呈余弦曲线变化;
32.当n=1,3,5,...时,
33.m
x-表示滚转力矩系数的波谷值,滚转力矩系数呈余弦曲线变化;
34.故,
35.根据上式即可求解飞行器的滚转阻尼力矩系数。
36.与现有技术相比,本发明的有益效果是:
37.本发明公开的低速旋转飞行器的滚转阻尼力矩系数计算方法,原理清晰,实现过程相对简单,通过约束流体域尺寸,可有效控制网格数量,减小计算量;通过设置流体域计算条件,可有效提高计算效率,有利于求解过程的快速收敛,以有效降低滚转阻尼力矩系数求解的复杂度,有效计算给定条件下的飞行器滚转阻尼力矩系数,提高计算效率;
38.本发明公开的低速旋转飞行器的滚转阻尼力矩系数计算方法,适用范围比较广泛,能基本包含飞行器的典型速度、攻角和侧滑角,可以满足飞行器不同计算条件下滚转阻尼力矩系数求解。
具体实施方式
39.本发明提供一种低速旋转飞行器的滚转阻尼力矩系数计算方法,计算步骤如下:
40.1.完成飞行器的三维建模;
41.2.进行飞行器流体域的创建,设定流体域为球体,半径等于20倍飞行器长度;
42.3.进行流体域网格模型划分,采用非结构网格,设定网格模型边界层为20层;
43.4.设定流体域计算条件,设定求解器为密度基,设定湍流模型为k-epsilon模型,设定流体域材料属性为理想大气模型;
44.5.进行指定条件下飞行器滚转力矩系数m
x
计算,本发明方法适用条件为飞行器速度<3ma,攻角<30
°
,侧滑角<30
°
,完成指定条件下的滚转力矩系数计算,输出“xxx.cas和xxx.dat”文件;
45.6.编写用户自定义函数udf函数,设定滚转运动的参数,包括运动幅值a,运动角速度w,滚转运动时间步t,运动方程
46.该函数编写完成后,输出“xxx.c”文件,通过fluent软件对该文件进行编译,编译后将产生“roll:libudf”文件;
47.7.进行飞行器滚转阻尼力矩系数c
lp
计算,其详细计算方法如下所示:
48.1)读取“xxx.cas和xxx.dat”文件,读取完成后,设定求解器为瞬态计算“transient”;
49.2)调用编译后产生的“roll:libudf”文件;
50.3)设定流体域为“mesh motion”,同时选择运动形式为“roll:li budf”;
51.4)设定组成飞行器的所有表面为运动面,即“moving wall”;
52.5)设定fluent计算时间步t,在进行滚转阻尼力矩系数计算时,其相关参数包括飞行器的参考长度、飞行速度v、运动角速度w以及飞行器轴向质心位置,飞行器的参考长度通常指直径d,设无量纲系数k值可任意设定一个大于零的常数,其值不影响计算结果,本发明计算验证时,设定k=0.1,则飞行器运动角速度飞行器滚转运动时间周期在进行fluent计算时,设每个滚转运动周期迭代n步,本发明计算验证时,设定n=100,则滚转运动时间步同时设定滚转运动振幅a,a值可任意设定一个大于零的常数,其值不影响计算结果,本发明计算验证时,设定a=0.25
°
;
53.6)设定计算周期,计算m个周期,m为非零正整数,本发明方法计算验证时设定m=5;
54.7)设定总计算步数=n*m,设定n=100,m为非零正整数,开始计算,完成每步计算后,输出一个滚转力矩系数m
x
数值,每个周期滚转力矩系数将呈余弦曲线变化;
55.8)根据输出的滚转力矩系数m
x
的波峰、波谷数值,通过下式求解滚转阻尼力矩系数,
[0056][0057]mx
表示滚转力矩系数的波峰值,滚转力矩系数呈余弦曲线变化;
[0058]mx-表示滚转力矩系数的波谷值,滚转力矩系数呈余弦曲线变化;
[0059]
9)每个周期可求取一个c
lp
值,再对其m个周期数值求平均值即为该飞行器在指定条件下的滚转阻尼力矩系数c
lp
。
[0060]
以上所述,仅是本发明的较佳实用实施例而已,并非对发明做任何形式上的限定,任何熟悉本专业的技术人员可能利用上述揭示的技术方案加以变更或修饰为等同变化的等效实施实例,但是凡是未脱离本发明技术方案内容,依据本发明的技术实质对上述实施实例所做的任何简单修改、等同变化与修饰,均仍属本发明技术方案的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。