技术特征:
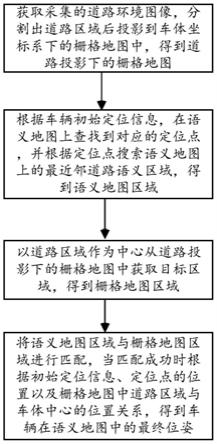
1.一种融合语义地图与道路信息的车辆定位方法,其特征在于,步骤包括:s01.获取车载图像采集设备采集的道路环境图像,分割出道路区域后投影到车体坐标系下的栅格地图中,得到道路投影下的栅格地图;s02.根据车辆当前获取的初始定位信息,在语义地图上查找到对应的定位点,并根据所述定位点搜索所述语义地图上的最近邻道路语义区域,得到语义地图区域;s03.以道路区域作为中心从所述道路投影下的栅格地图中获取目标区域,得到栅格地图区域;s04.将所述语义地图区域与所述栅格地图区域进行匹配,当匹配成功时根据所述车辆当前的初始定位信息、所述定位点的位置以及所述道路投影下的栅格地图中道路区域与车体中心的位置关系,得到车辆在语义地图中的最终位姿输出。2.根据权利要求1所述的融合语义地图与道路信息的车辆定位方法,其特征在于,所述步骤s01中,使用深度卷积语义分割模型从所述道路环境图像中分割出道路区域。3.根据权利要求1所述的融合语义地图与道路信息的车辆定位方法,其特征在于,所述步骤s02的步骤包括:s201.通过在以查找到的所述定位点为圆心、指定大小半径的区域内,搜索离所述圆心最近的道路区域中线上的点,得到所述新定位点;s202.根据所述新定位点在语义地图上获取指定的地图区域,得到所述语义地图区域。4.根据权利要求3所述的融合语义地图与道路信息的车辆定位方法,其特征在于,所述步骤s201后、s202前还包括计算所述新定位点获取当前道路区域的中线与x轴的夹角,根据所述夹角旋转语义地图,以使得道路区域的中线与x轴垂直;所述步骤s202中,以所述新定位点为基准点,在所述旋转后语义地图上获取所述基准点向左、右指定距离以及向前指定距离的地图区域,得到所述语义地图区域。5.根据权利要求1所述的融合语义地图与道路信息的车辆定位方法,其特征在于,所述步骤s03的步骤包括:s301.根据所述道路投影下的栅格地图,计算车体中心到道路区域左右边界的距离,得到车辆在道路中的横向位置;s302.根据步骤s301计算的结果,将所述道路投影下的栅格地图中的道路区域平移至栅格地图的中间,位移的方向为朝向车体中心距离道路左右边界距离小的一侧,得到平移后的栅格地图;s303.从所述平移后的栅格地图中取向左右指定距离、向前指定距离的区域,得到所述栅格地图区域。6.根据权利要求1~5中任意一项所述的融合语义地图与道路信息的车辆定位方法,其特征在于,所述步骤s04中,计算所述语义地图区域与所述栅格地图区域之间道路区域的iou值,根据所述iou值判断是否匹配成功,当判定匹配不成功时,判定车辆偏离道路区域。7.根据权利要求1~5中任意一项所述的融合语义地图与道路信息的车辆定位方法,其特征在于,所述步骤s04中,将步骤s02中确定的定位点在地图中的纵坐标作为最终纵向定位坐标,将车体中心在所述道路投影下的栅格地图中的横向位置信息,结合所述定位点在所述语义地图区域中的横向坐标,得到车辆最终的横向定位坐标。8.根据权利要求7所述的融合语义地图与道路信息的车辆定位方法,其特征在于,具体
将所述定位点在所述语义地图区域中的横向坐标,向所述车体中心距离道路左右边界距离小的方向移动,移动距离为车体中心到道路左右边界距离差值的一半,得到所述车辆最终的横向定位坐标。9.一种融合语义地图与道路信息的车辆定装置,其特征在于,包括:图像分割模块,用于获取车载图像采集设备采集的道路环境图像,分割出道路区域后投影到车体坐标系下的栅格地图中,得到道路投影下的栅格地图;语义地图获取模块,用于根据车辆当前获取的初始定位信息,在语义地图上查找到对应的定位点,并根据所述定位点搜索所述语义地图上的最近邻道路语义区域,得到语义地图区域;栅格地图获取模块,用于以道路区域作为中心从所述道路投影下的栅格地图中获取目标区域,得到栅格地图区域;位姿输出模块,用于将所述语义地图区域与所述栅格地图区域进行匹配,当匹配成功时根据所述车辆当前的初始定位信息、所述定位点的位置以及所述道路投影下的栅格地图中道路区域与车体中心的位置关系,得到车辆在语义地图中的最终位姿输出。10.一种计算机装置,包括处理器以及存储器,所述存储器用于存储计算机程序,所述处理器用于执行所述计算机程序,其特征在于,所述处理器用于执行所述计算机程序以执行如权利要求1~8中任意一项所述方法。
技术总结
本发明公开一种融合语义地图与道路信息的车辆定位方法及装置,该方法步骤包括:S01.获取道路环境图像,分割出道路区域后投影到车体坐标系下的栅格地图中;S02.根据车辆当前获取的初始定位信息,在语义地图上查找到对应的定位点,并搜索最近邻道路语义区域,得到语义地图区域;S03.以道路区域作为中心从栅格地图中获取目标区域,得到栅格地图区域;S04.将语义地图区域与栅格地图区域进行匹配,当匹配成功时根据车辆当前的初始定位信息、定位点的位置以及栅格地图中道路区域与车体中心的位置关系,得到车辆最终位姿输出。本发明具有实现方法简单、成本低、效率以及精度高且环境适应性、鲁棒性强等优点。鲁棒性强等优点。鲁棒性强等优点。
技术研发人员:李迅 蒋杰
受保护的技术使用者:长沙慧联智能科技有限公司
技术研发日:2022.01.11
技术公布日:2022/4/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。