技术特征:
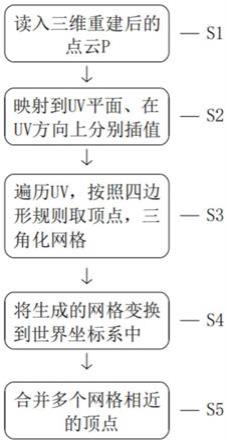
1.一种快速三维点云生成三维网格的方法,其特征在于,包括如下步骤:s1、读入三维重建后的点云p,该帧点云p是在当前相机坐标系下的二维条纹图对应的三维点云;s2、映射到uv平面,在uv方向上分别插值时采用线性插值,根据条纹图的特点,采用u方向上插值,或者v方向上插值,或者uv两个方向上插值;s3、遍历uv按照四边形规则取顶点并三角化网格,遍历uv坐标的第r行和第r 1数据,分别取p(u,v),p(u,v 1),p(u 1,v 1),p(u 1,v)四个点生产三角形;s4、将生成的所有三角形组成mesh0,并通过变换矩阵将其变换到全局坐标系下;s5、根据提供的set(indexes),找到每个index对应的外包box,取每个外包box对应的整体mesh的顶点和当前mesh0的顶点进行临近顶点合并,最终生成整体的mesh。2.根据权利要求1所述的一种快速三维点云生成三维网格的方法,其特征在于:所述点云p其属性包括,相机坐标系下三维空间位置x,y,z,相机坐标系下三维空间法向xn,yn,zn,点云p中每个点的rgb颜色值,点云p中每个点的权重q,权重越大表示可信度越高,权重越小表明可信度越低,点云p中每个点在uv平面的坐标u,v,点云p从相机坐标系到全局坐标系的变换矩阵m,该帧点云邻域点云的索引集set(indexes)。3.根据权利要求1所述的一种快速三维点云生成三维网格的方法,其特征在于:所述条纹图如果为uv方向上的是均匀的,且点云三维重建后生成的点云没有采样,则不需要进行插值或者根据分辨率是否满足要求,分别在uv方向上进行线性插值,如果条纹图uv方向上不是均匀的,或者点云三维重建后进行了点云的采样,则需要进行u或者v方向上线性插值,保证uv方向上点云的密度相同,u方向上或者uv方向线性插值类似。4.根据权利要求1所述的一种快速三维点云生成三维网格的方法,其特征在于:所述v方向上线性插值以分辨率(如400*600)的range image为例,由于数据在cols方向上因三维点云重建采样导致数据缺失严重,因此对于每一行数据r(r表示第r行数据),找到v0和v1,且v0,v1对应的三维坐标均存在,且r行v0,v1间对应的三维数据均不存在,则对v0和v1之间线性插值(v1-v0-1)个数据。5.根据权利要求4所述的一种快速三维点云生成三维网格的方法,其特征在于:所述v方向上考虑到线性插值,会在z方向上变化剧烈的地方生成噪点,需要对算法增加两个阈值f3dthreshod,fvtreshold判断,其中满足dist(p(r,v0),p(r,v1))<f3dthreshold且v1-v0<fvthread条件才能进行插值,其中dist表示p(r,v0)和p(r,v1)对应的三维点的距离,如欧式距离。6.根据权利要求5所述的一种快速三维点云生成三维网格的方法,其特征在于:所述阈值实际计算中f3dthreshod一般和条纹间的距离有关,fvtreshold是uv平面上的像素值,用来防止在孔洞中误差点云,需要根据具体的设备性质进行验证设置。7.根据权利要求1所述的一种快速三维点云生成三维网格的方法,其特征在于:所述四个点对应的三维点云如果都存在,则将该四边形划分为两个三角形,如果存在三个对应的三维点云,则构造一个三角形,其他情况不生成三角形。
技术总结
本发明涉及三维扫描技术领域,且公开了一种快速三维点云生成三维网格的方法,读入三维重建后的点云P,该帧点云P是在当前相机坐标系下的二维条纹图对应的三维点云,映射到UV平面,在UV方向上分别插值时采用线性插值。该快速三维点云生成三维网格的方法使用时,通过设置基于条纹图生成的三维点云的特征,提出了一种基于UV平面生成三维网格的方法,对当前帧的点云快速完成三角网格化,插值和网格化的步骤均可以采用并行操作,速度极快,可以满足速度要求较高的三维扫描设备,对内存的要求远远低于体素方法,能满足对内存要求不高的扫描扫描环境,能够比体素的方法生成速度快,占用内存少。少。少。
技术研发人员:孙军 张佰春 吕广志
受保护的技术使用者:深圳市菲森科技有限公司
技术研发日:2022.01.23
技术公布日:2022/4/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。