基于解剖先验的口腔锥形束ct三维图像去噪方法和系统
技术领域
1.本技术涉及医学成像技术领域,更具体地,涉及基于解剖先验的口腔锥形束ct三维图像去噪方法和系统。
背景技术:
2.锥形束ct具有快速扫描,高空间分辨率,低辐射剂量的优点,在口腔医疗应用广泛,然而受其探测器电子噪声及x射线散射等因素影响,重建的cbct图像往往存在大量噪声,严重影响图像质量,进而导致医生对患者的临床检查和诊断有一定的困难和干扰。
3.目前,常用的传统图像去噪方法有均值滤波,中值滤波,高斯滤波等方法,但这些方法极容易导致图像模糊并丢失较多具有临床价值的图像细节,无法满足临床诊断需求;有些常用的保边去噪方法如双边滤波等方法对一些强对比的结构边缘有一定的保持效果,但在进行较大程度平滑的同时对一些弱对比的细节边缘保持效果仍然有限;还有一些图像去噪方法如非局部均值滤波,bm3d滤波等方法,具有较好的细节保持效果,但计算量大且耗时长,难以在实际临床中应用。
4.因此,既能最大程度地降低噪声,同时也能保持重要的细节信息是一项富有挑战的关键课题。在口腔医疗中,牙槽骨和牙齿边缘等细节信息对于医生检查和诊断来说非常重要,如何提供口腔锥形束ct的去噪方法和系统,在图像去噪过程中尽可能地降低噪声且能同时保持牙槽骨和牙齿边缘等临床重要细节信息成为亟待解决的技术问题,为此我们提出基于解剖先验的口腔锥形束ct三维图像去噪方法和系统以解决上述提出的问题。
技术实现要素:
5.鉴于上述问题,本技术提出了基于解剖先验的口腔锥形束ct三维图像去噪方法和系统,在图像去噪过程中尽可能地降低噪声且能同时保持牙槽骨和牙齿边缘等临床重要细节信息,使医生对口腔的临床检查和诊断更精准,以改善上述问题。
6.为实现以上目的,本发明通过以下技术方案予以实现:基于解剖先验的口腔锥形束ct三维图像去噪方法,包括以下步骤:步骤一:获取一组待去噪的cbct切片序列图像;
7.步骤二:依次对每层待去噪图像f进行增强锐化和高斯滤波处理得到第一去噪图像i;
8.步骤三:根据第一去噪图像i的图像边缘系数和图像灰度分布进行计算提取得到当前图像i的解剖先验权重图像w,并对其进行中值滤波处理;
9.步骤四:根据步骤3得到的解剖先验权重图像w进行计算生成得到标准差图像,包括空间标准差图像σs和灰度标准差图像σg;
10.步骤五:根据步骤4得到的空间标准差图像σs和灰度标准差图像σg,对第一去噪图像i执行三维的双边滤波处理可得到第二去噪图像ib;
11.步骤六:对步骤5得到的第二去噪图像ib可进一步执行中值滤波处理得到第三去噪图像im,再与第二去噪图像ib进行加权融合处理,得到最终的去噪图像i
dn
。
12.优选的,所述获取一组待去噪的cbct切片序列图像具体为:通过口腔锥形束ct对患者进行不同角度扫描采集得到投影数据,并对投影数据重建则可获取得到一组待去噪切片序列图像。
13.优选的,所述依次对每层待去噪图像f进行增强锐化和高斯滤波处理得到第一去噪图像i具体为:
14.在待去噪图像f中选取任一坐标为(x,y,z)的体素点并利用拉普拉斯算子进行三维的边缘增强,得到边缘锐化图像h;
15.为抑制噪声干扰的增强,对锐化图像h进行三维高斯滤波,得到第一去噪图像i。
16.优选的,所述根据第一去噪图像i的图像边缘系数和图像灰度分布进行计算提取得到当前图像i的解剖先验权重图像w,并对其进行中值滤波处理具体为:
17.根据待处理像素的邻域计算当前像素的边缘系数d(x,y,z);
18.根据图像灰度分布及获得的边缘系数d(x,y,z)可计算得到其解剖先验权重图像w;对得到的解剖先验权重图像w进行中值滤波处理。
19.优选的,所述步骤3中解剖先验权重图像w的计算方式具体为:
[0020][0021]
其中,
[0022]
优选的,所述根据步骤3得到的解剖先验权重图像w进行计算生成得到标准差图像,包括空间标准差图像σs和灰度标准差图像σg,具体计算方式为:
[0023]
σs(x,y,z)=σ
smax-w(x,y,z)
·
(σ
smax-σ
smin
)
[0024]
σg(x,y,z)=σ
gmax-w(x,y,z)
·
(σ
gmax-σ
gmin
)。
[0025]
优选的,所述根据步骤4得到的空间标准差图像σs和灰度标准差图像σg,对第一去噪图像i执行三维的双边滤波处理可得到第二去噪图像ib,具体计算如下:
[0026][0027]
优选的,所述对步骤5得到的第二去噪图像ib可进一步执行中值滤波处理得到第三去噪图像im,再与第二去噪图像ib进行加权融合处理,得到最终的去噪图像i
dn
:
[0028]idn
(x,y,z)=wm(x,y,z)
·im
(x,y,z) [1-wm(x,y,z)]
·
ib(x,y,z)。
[0029]
基于解剖先验的口腔锥形束ct三维图像去噪系统,其特征在于:包括:获取模块:主要用于获取待去噪的cbct切片序列图像数据;
[0030]
增强模块:主要使用拉普拉斯算子对图像边缘进行增强锐化;
[0031]
提取模块:根据图像边缘系数和图像灰度分布进行计算提取得到解剖先验权重图像;
[0032]
生成模块:根据解剖先验权重图像进行计算生成得到标准差图像;
[0033]
滤波模块:使用高斯滤波,中值滤波或双边滤波对图像进行滤波平滑;
[0034]
融合模块:主要将使用不同处理方式得到的图像进行加权融合。
[0035]
优选的,包括以下步骤:
[0036]
s1、先通过获取模块从cbct系统中获取得到一组待去噪的cbct切片序列图像数据;
[0037]
s2、再通过增强模块对待去噪图像的边缘进行增强锐化得到边缘锐化的图像;
[0038]
s3、然后通过滤波模块对边缘锐化的图像进行高斯滤波处理得到第一去噪图像i;
[0039]
s4、再通过提取模块对第一去噪图像i进行计算并提取得到解剖先验权重图像,并通过滤波模块对解剖先验权重图像进行中值滤波处理;
[0040]
s5、然后通过生成模块并根据解剖先验权重图像计算生成得到标准差图像;
[0041]
s6、然后通过滤波模块并根据标准差图像对第一去噪图像i进行双边滤波处理得到第二去噪图像ib;
[0042]
s7、然后通过滤波模块对第二去噪图像ib进行中值滤波处理得到第三去噪图像im;
[0043]
s8、最后通过融合模块将第二去噪图像ib和第三去噪图像im进行加权融合得到最终的去噪图像i
dn
。
[0044]
本技术提供的基于解剖先验的口腔锥形束ct三维图像去噪方法和系统,具备以下有益效果:
[0045]
1、该基于解剖先验的口腔锥形束ct三维图像去噪方法和系统,通过步骤2对图像增强使牙槽骨和牙齿边缘等细节呈现对比得到提升,再利用步骤3计算得到解剖先验权重图像,然后采用步骤4根据权重计算生成得到标准差图像,并通过步骤5进行滤波去噪,此过程可对牙槽骨和牙齿边缘等重要解剖细节进行保护,最后通过步骤6对牙齿硬组织进行平滑进一步消除残留噪声,在去噪过程中可有效对牙槽骨和牙齿边缘等重要解剖细节进行保持,使医生对口腔的临床检查和诊断更精准。
[0046]
2、该基于解剖先验的口腔锥形束ct三维图像去噪方法和系统,计算量和复杂度都较小,降低对硬件、软件等基础设施的需求,可快速应用于临床。
附图说明
[0047]
为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0048]
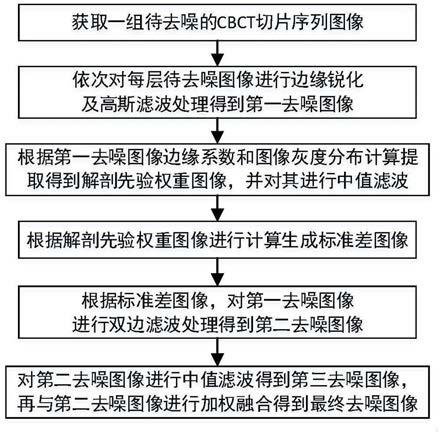
图1为本发明基于解剖先验的口腔锥形束ct三维图像去噪方法的流程图;
[0049]
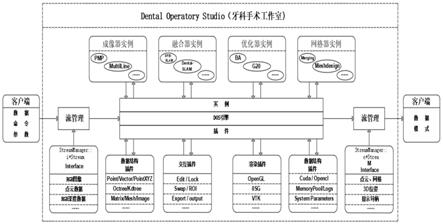
图2为本发明基于解剖先验的口腔锥形束ct三维图像去噪系统的流程图;
[0050]
图3为本发明基于解剖先验的口腔锥形束ct三维图像去噪方法的待去噪图像;
[0051]
图4为本发明基于解剖先验的口腔锥形束ct三维图像去噪方法的最终去噪图像。
具体实施方式
[0052]
下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
[0053]
请参阅图1至4本发明提供技术方案:基于解剖先验的口腔锥形束ct三维图像去噪方法,包括以下步骤:步骤一:获取一组待去噪的cbct切片序列图像;
[0054]
步骤二:依次对每层待去噪图像f进行增强锐化和高斯滤波处理得到第一去噪图像i;
[0055]
步骤三:根据第一去噪图像i的图像边缘系数和图像灰度分布进行计算提取得到当前图像i的解剖先验权重图像w,并对其进行中值滤波处理;
[0056]
步骤四:根据步骤3得到的解剖先验权重图像w进行计算生成得到标准差图像,包括空间标准差图像σs和灰度标准差图像σg;
[0057]
步骤五:根据步骤4得到的空间标准差图像σs和灰度标准差图像σg,对第一去噪图像i执行三维的双边滤波处理可得到第二去噪图像ib;
[0058]
步骤六:对步骤5得到的第二去噪图像ib可进一步执行中值滤波处理得到第三去噪图像im,再与第二去噪图像ib进行加权融合处理,得到最终的去噪图像i
dn
。
[0059]
所述获取一组待去噪的cbct切片序列图像具体为:通过口腔锥形束ct对患者进行不同角度扫描采集得到投影数据,并对投影数据重建则可获取得到一组待去噪切片序列图像。
[0060]
所述依次对每层待去噪图像f进行增强锐化和高斯滤波处理得到第一去噪图像i具体为:
[0061]
在待去噪图像f中选取任一坐标为(x,y,z)的体素点并利用拉普拉斯算子进行三维的边缘增强,得到边缘锐化图像h;此步骤主要是对边缘增强,能够将牙槽骨和牙齿边缘等细节对比进行提升,有利于其边缘系数的计算提取;
[0062]
计算公式为:其中,c为增强因子参数,本发明取c=0.04;
[0063]
为抑制噪声干扰的增强,对锐化图像h进行三维高斯滤波,得到第一去噪图像i,具体如下:其中,q点为图像h中待计算的体素点,p点为q点的邻域q内的任意一点,wg(x
p
,y
p
,z
p
)为p点的权重,计算如下:其中,σ为预设的高斯滤波平滑参数(本发明取值σ=0.5)。
[0064]
所述根据第一去噪图像i的图像边缘系数和图像灰度分布进行计算提取得到当前图像i的解剖先验权重图像w,并对其进行中值滤波处理。具体为:
[0065]
根据待处理像素的邻域计算当前像素的边缘系数d(x,y,z);
[0066]
计算公式为:d(x,y,z)=ex(x,y,z) ey(x,y,z) ez(x,y,z),
[0067]
其中ex,ey,ez为分别对沿x,y,z不同方向获得的边缘系数dx,dy,dz按下式归一化得到:
[0068]
其中,边缘系数dx,dy或dz在点(x,y,z)处的系数可表示为d(x,y,z),归一化后可对应得到e(x,y,z)。这里的边缘系数主要反映解剖结构在不同方向层间的变化程度,边缘系数较小的主要是软组织等相对均匀的组织,边缘系数较大的主要是牙齿边缘和牙槽骨等硬组织边缘细节。边缘系数dx,dy,dz的获得方式如下:
[0069][0070][0071][0072]
根据图像灰度分布及获得的边缘系数d(x,y,z)可计算得到其解剖先验权重图像w,计算公式为:
[0073]
其中,α为预设固定参数(本发明取值α=50),t
min
和t
max
为预设灰度阈值(本发明取值t
min
=0,t
max
=800)。解剖先验权重主要反映去噪过程中细节保持程度,对解剖边缘系数较大的牙槽骨和牙齿边缘及较高灰度的牙齿硬组织则分配相对较大的权重,能更好地保护牙齿硬组织上较弱的边缘细节等。
[0074]
对得到的解剖先验权重图像w进行中值滤波处理。
[0075]
所述根据步骤3得到的解剖先验权重图像w进行计算生成得到标准差图像,包括空间标准差图像σs和灰度标准差图像σg,具体计算方式为:
[0076]
σs(x,y,z)=σ
smax-w(x,y,z)
·
(σ
smax-σ
smin
)
[0077]
σg(x,y,z)=σ
gmax-w(x,y,z)
·
(σ
gmax-σ
gmin
)
[0078]
其中,σ
smax
、σ
smin
和σ
gmax
、σ
gmin
为预设阈值参数(本发明取值σ
smax
=2.1,σ
smin
=1.4,σ
gmax
=700,σ
gmin
=250)。通过此步骤的计算,对于解剖先验权重较大的体素则得到较小的平滑参数,而对于解剖先验权重较小的体素则得到较大的平滑参数。
[0079]
所述根据步骤4得到的空间标准差图像σs和灰度标准差图像σg,对第一去噪图像i执行三维的双边滤波处理可得到第二去噪图像ib,具体计算如下:
[0080][0081]
其中,q点为图像i中任意一体素点,p点为q点处大小为r
×r×
r的邻域q内的任意一点(本发明取值r=5),ws(x
p
,y
p
,z
p
)和wg(x
p
,y
p
,z
p
)分别表示空间权重和灰度权重,计算如下:
[0082][0083][0084]
所述对步骤5得到的第二去噪图像ib可进一步执行中值滤波处理得到第三去噪图像im,再与第二去噪图像ib进行加权融合处理,得到最终的去噪图像i
dn
:
[0085]idn
(x,y,z)=wm(x,y,z)
·im
(x,y,z) [1-wm(x,y,z)]
·
ib(x,y,z)
[0086]
其中,权重wm可按下式计算得到:
[0087][0088]
其中,s
min
和s
max
为预设的灰度阈值(本发明取值为s
min
=700,s
max
=1000)。为了避免步骤5对牙齿硬组织进行较低的平滑滤波导致均匀硬组织中残留噪声,此步骤主要针对牙齿硬组织分配较大的平滑权重,使牙齿硬组织平滑得到进一步加强,消除残留噪声。
[0089]
基于解剖先验的口腔锥形束ct三维图像去噪系统,其特征在于:包括:获取模块:主要用于获取待去噪的cbct切片序列图像数据;
[0090]
增强模块:主要使用拉普拉斯算子对图像边缘进行增强锐化;
[0091]
提取模块:根据图像边缘系数和图像灰度分布进行计算提取得到解剖先验权重图像;
[0092]
生成模块:根据解剖先验权重图像进行计算生成得到标准差图像;
[0093]
滤波模块:使用高斯滤波,中值滤波或双边滤波对图像进行滤波平滑;
[0094]
融合模块:主要将使用不同处理方式得到的图像进行加权融合。
[0095]
基于解剖先验的口腔锥形束ct三维图像去噪系统,包括以下步骤:
[0096]
s1、先通过获取模块从cbct系统中获取得到一组待去噪的cbct切片序列图像数据;
[0097]
s2、再通过增强模块对待去噪图像的边缘进行增强锐化得到边缘锐化的图像;
[0098]
s3、然后通过滤波模块对边缘锐化的图像进行高斯滤波处理得到第一去噪图像i;
[0099]
s4、再通过提取模块对第一去噪图像i进行计算并提取得到解剖先验权重图像,并通过滤波模块对解剖先验权重图像进行中值滤波处理;
[0100]
s5、然后通过生成模块并根据解剖先验权重图像计算生成得到标准差图像;
[0101]
s6、然后通过滤波模块并根据标准差图像对第一去噪图像i进行双边滤波处理得到第二去噪图像ib;
[0102]
s7、然后通过滤波模块对第二去噪图像ib进行中值滤波处理得到第三去噪图像im;
[0103]
s8、最后通过融合模块将第二去噪图像ib和第三去噪图像im进行加权融合得到最终的去噪图像i
dn
。
[0104]
在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了
便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制;术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性,此外,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
[0105]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。