1.本发明涉及固定翼无人机技术领域,尤其涉及一种舵面重构方法、终端及可读存储介质。
背景技术:
2.在固定翼无人机的飞行过程中,舵机是很重要的执行器,它连接舵面,一旦舵机失效,会导致舵面失效,进而导致固定翼飞机的姿态不可控,从而引发严重的事故,所以目前大型固定翼飞机上的舵机是一套系统,带有角度反馈,能传递给飞控,使飞控能够判别舵机是否异常,从而实现舵机执行器的重构操作。
3.目前在小型固定翼无人机上,由于结构布局、电气布局及维护成本限制,执行机构舵机往往采用无角度反馈的商业电动舵机,且操作的多是单一舵面。无角度反馈的舵机机构一般难以检测舵机及舵面故障。由于舵面故障信息难以获取,所以导致舵面重构困难。一旦发生如堵转、虚位、跳舵或者连杆脱落等故障,无人机可能会有由于执行器异常,最终导致坠机的风险。
技术实现要素:
4.有鉴于此,本发明提供了一种舵面重构方法、终端及可读存储介质,在不增加设计成本和工艺成本的前提下实现了对无人机舵面的故障检测及重构。
5.第一方面,本发明提供了一种舵面重构方法,应用于固定翼无人机,包括:
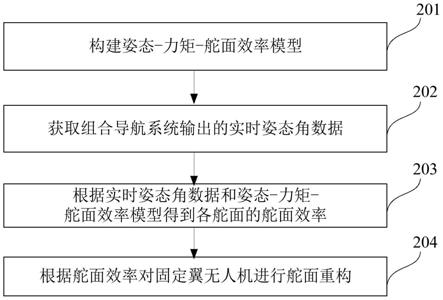
6.构建姿态-力矩-舵面效率模型;
7.获取组合导航系统输出的实时姿态角数据;
8.根据所述实时姿态角数据和所述姿态-力矩-舵面效率模型得到各舵面的舵面效率;
9.根据所述舵面效率对所述固定翼无人机进行舵面重构。
10.其中,所述构建姿态-力矩-舵面效率模型,包括构建状态量的非线性状态转移方程,以及,构建状态量和输出量的转换方程;
11.所述构建姿态-力矩-舵面效率模型的表达式为:
[0012][0013]
式(1)为状态量的非线性状态转移方程;
[0014]
式(2)为状态量和输出量的转换方程;
[0015]
式中,x为状态量,x=[θ ω η]
t
,θ为姿态角,ω为姿态角速率,η为舵面效率;y为输出量,y=[θ ω]
t
;c为常数矩阵,u为输入舵偏角。
[0016]
其中,所述构建状态量的非线性状态转移方程,包括:
[0017]
建立气动力的非线性方程:
[0018][0019]
式中,l为机体绕x轴产生的力矩;m为机体绕y轴产生的力矩;n为机体绕z轴产生的力矩,为动压,s0为机翼等效面积,b为等效翼展;c为等效气动弦长;c
l
为滚转力力矩方程;cm为俯仰力力矩方程;cn为偏航力力矩方程;β为侧滑角;p为绕x轴的角速率;r为绕z轴的角速率;δa为副翼偏转角;δr为方向舵偏转角;α为迎角;q为绕y轴的角速率;δe为升降舵舵偏角;ηa为副翼舵面效率;ηe为升降舵舵面效率;ηr为方向舵舵面效率;
[0020]
计算气动力矩:
[0021][0022]
式中,m为气动力矩;m
x
、my、mz分别机体坐标系中沿x轴、y轴、z轴方向的气动力矩;i
x
、iy、iz分别为机体坐标系中沿x轴、y轴、z轴方向的转动惯量;
[0023]
根据气动力矩计算角加速度:
[0024]
m=i
·
ε ω
×i·
ω
[0025]
式中,ω为矢量角速率,ε为角加速度;
[0026]
根据角加速度计算得到角速度标量
[0027][0028]
根据角速度标量得到姿态角:
[0029][0030]
式中,为体系坐标转惯性系的转换矩阵;θ为姿态角。
[0031]
其中,所述根据所述实时姿态角数据和所述姿态-力矩-舵面效率模型得到各舵面的舵面效率,包括:
[0032]
根据所述姿态-力矩-舵面效率模型得到所述状态量和输出量;
[0033]
根据所述实时姿态角数据在所述姿态-力矩-舵面效率模型中迭代更新所述状态量和所述输出量;
[0034]
根据更新后的所述状态量的加权均值得到各舵面的舵面效率。
[0035]
其中,所述根据所述姿态-力矩-舵面效率模型得到所述状态量和输出量,还包括:
[0036]
根据状态量的初始加权均值和初始加权协方差得到各sigma点的状态量:
[0037][0038]
式中,x为状态量,是sigma点的集合,总共2n 1个;i为sigma点序号;κ为无迹变换参数;n为状态量维数;μ为状态量的加权均值;p为状态量的加权协方差;
[0039]
根据所述非线性状态转移方程更新各sigma点的状态量x(i):
[0040][0041]
根据各sigma点的权值和各sigma点的值更新所述状态量的加权均值μ和加权协方差p:
[0042][0043][0044]
式中,q为常数矩阵,即状态量的噪声矩阵;w(i)为各sigma点状态量x(i)的权值;
[0045]
根据各sigma点的权值以及所述状态量和输出量的转换方程得到各sigma点的输出量y(i)的加权均值z和加权协方差s:
[0046][0047][0048]
式中,r为常数矩阵,即量测量的噪声矩阵;
[0049]
计算每个sigma点的状态量x(i)和每个sigma点的输出量y(i)的互协方差t:
[0050][0051]
根据互协方差t和输出量的加权协方差s计算得到增益k:
[0052]
k=ts-1
[0053][0054]
其中,所述根据所述实时姿态角数据在所述姿态-力矩-舵面效率模型中迭代更新所述状态量和所述输出量,包括:
[0055]
根据所述实时姿态角数据更新状态量的加权均值:
[0056]
[0057]
式中,为更新后的状态量的加权均值;m为实时姿态角数据,m=[θ ω]
t
为组合导航系统输出的姿态角和姿态角速率。
[0058]
其中,所述根据所述姿态-力矩-舵面效率模型得到所述状态量和输出量之前,还包括:
[0059]
计算各sigma点状态量x(i)的权值,表达式为:
[0060][0061]
式中,w(i)为各sigma点状态量x(i)的权值;κ为无迹变换参数;n为状态量维数,i为sigma点序号。
[0062]
其中,所述根据所述舵面效率对所述无人机进行舵面重构,包括:
[0063]
若主舵面效率大于或等于副舵面生效阈值,则仅控制主舵面输出;
[0064]
若主舵面效率小于副舵面生效阈值,则增加副舵面辅助输出。
[0065]
第二方面,本发明还提供了一种舵面重构系统,包括至少一个处理器;以及至少一个存储器,所述至少一个存储器被耦合到所述至少一个处理器并且存储用于由所述至少一个处理器执行的指令,所述指令当由所述至少一个处理器执行时,使得所述系统执行根据如第一方面所述的舵面重构方法的步骤。
[0066]
第三方面,本发明还提供了一种可读存储介质,所述可读存储介质上存储有计算机程序指令;计算机程序指令被处理器执行时实现如上所述的的舵面重构方法。
[0067]
综上所述,本发明提供了一种舵面重构方法,应用于固定翼无人机,包括:构建姿态-力矩-舵面效率模型;获取组合导航系统输出的实时姿态角数据;根据实时姿态角数据和姿态-力矩-舵面效率模型得到各舵面的舵面效率;根据舵面效率对固定翼无人机进行舵面重构。本发明在不增加设计成本和工艺成本的前提下实现了对无人机舵面的故障检测及重构。
[0068]
上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其他目的、特征和优点能够更明显易懂,以下特举较佳实施例,并配合附图,详细说明如下。
附图说明
[0069]
图1为根据本发明实施例示出的舵面重构方法的流程示意图;
[0070]
图2为根据本发明实施例示出的舵面重构方法的具体流程示意图;
[0071]
图3为根据本发明实施例示出的舵面重构方法的算法流程示意图。
具体实施方式
[0072]
为更进一步阐述本发明为达成预定发明目的所采取的技术手段及功效,以下结合附图及较佳实施例,对本发明详细说明如下。
[0073]
图1为根据本发明实施例示出的舵面重构方法的流程示意图。如图1所示,本发明实施例提供了一种舵面重构方法,包括:
[0074]
步骤201:构建姿态-力矩-舵面效率模型;
[0075]
步骤202:获取组合导航系统输出的实时姿态角数据;
[0076]
步骤203:根据实时姿态角数据和姿态-力矩-舵面效率模型得到各舵面的舵面效率;
[0077]
步骤204:根据舵面效率对固定翼无人机进行舵面重构。
[0078]
本实施例中,如图2所示,首先构建姿态-力矩-舵面效率模型。接着,通过组合导航系统采集固定翼无人机飞行过程中实时姿态角数据,包括姿态角和姿态角速率,其中,姿态角包括滚转角、俯仰角和偏航角,姿态角速率包括滚转角速率、俯仰角速率和偏航角速率。在固定翼无人机飞行时,根据实时姿态角数据和姿态-力矩-舵面效率模型计算无人机中各舵面的舵面效率。无人机在正常情况下只出主舵,副舵做备份及重构用,在主舵的效率低于一定百分比后,主舵可能出现故障,此时控制副舵辅助输出以重构舵面,恢复需求效率,能降低固定翼无人机的机械劳损,更合理地分配舵面效率。
[0079]
在一实施方式中,构建姿态-力矩-舵面效率模型,包括构建状态量的非线性状态转移方程,以及,构建状态量和输出量的转换方程;
[0080]
构建姿态-力矩-舵面效率模型的表达式为:
[0081][0082]
式(1)为状态量的非线性状态转移方程;
[0083]
式(2)为状态量和输出量的转换方程;
[0084]
式中,x为状态量,x=[θ ω η]
t
,θ为姿态角,ω为姿态角速率,η为舵面效率;y为输出量,y=[θ ω]
t
;c为常数矩阵,u为输入舵偏角。
[0085]
可选地,构建状态量的非线性状态转移方程,包括:
[0086]
建立气动力的非线性方程:
[0087][0088]
式中,l为机体绕x轴产生的力矩;m为机体绕y轴产生的力矩;n为机体绕z轴产生的力矩,为动压,s0为机翼等效面积,b为等效翼展;c为等效气动弦长;c
l
为滚转力力矩方程;cm为俯仰力力矩方程;cn为偏航力力矩方程;β为侧滑角;p为绕x轴的角速率;r为绕z轴的角速率;δa为副翼偏转角;δr为方向舵偏转角;α为迎角;q为绕y轴的角速率;δe为升降舵舵偏角;ηa为副翼舵面效率;ηe为升降舵舵面效率;ηr为方向舵舵面效率;
[0089]
计算气动力矩:
[0090][0091]
式中,m为气动力矩;m
x
、my、mz分别机体坐标系中沿x轴、y轴、z轴方向的气动力矩;i
x
、iy、iz分别为机体坐标系中沿x轴、y轴、z轴方向的转动惯量;
[0092]
根据气动力矩计算角加速度:
[0093]
m=i
·
ε ω
×i·
ω
[0094]
式中,ω为矢量角速率,ε为角加速度;
[0095]
根据角加速度计算得到角速度标量
[0096][0097]
根据角速度标量得到姿态角:
[0098][0099]
式中,为体系坐标转惯性系的转换矩阵;θ为姿态角。
[0100]
可选地,根据实时姿态角数据和姿态-力矩-舵面效率模型得到各舵面的舵面效率,包括:
[0101]
根据姿态-力矩-舵面效率模型得到状态量和输出量;
[0102]
根据实时姿态角数据在姿态-力矩-舵面效率模型中迭代更新状态量和输出量;
[0103]
根据更新后的状态量的加权均值得到各舵面的舵面效率。
[0104]
可选地,根据姿态-力矩-舵面效率模型得到状态量和输出量,还包括:
[0105]
状态量确定性采样得到sigma点,即根据状态量的初始加权均值和初始加权协方差得到各sigma点的状态量:
[0106][0107]
式中,x为状态量,是sigma点的集合,总共2n 1个;i为sigma点序号;κ为无迹变换参数;n为状态量维数;μ为状态量的加权均值;p为状态量的加权协方差;
[0108]
根据非线性状态转移方程更新各sigma点的状态量x(i):
[0109][0110]
根据各sigma点的权值和各sigma点的值更新状态量的加权均值μ和加权协方差p:
[0111]
[0112][0113]
式中,q为常数矩阵,即状态量的噪声矩阵;w(i)为各sigma点状态量x(i)的权值;
[0114]
接着,根据状态量和输出量的转换方程得到计算输出量
[0115]
y=cx
[0116]
根据各sigma点的权值以及各sigma点的输出量y(i)的加权均值z和加权协方差s:
[0117][0118][0119]
式中,r为常数矩阵,即量测量的噪声矩阵;
[0120]
计算状态量x(i)和输出量y(i)的互协方差t:
[0121][0122]
根据互协方差t和输出量的加权协方差s计算得到增益k:
[0123]
k=ts-1
[0124][0125]
可选地,根据实时姿态角数据在姿态-力矩-舵面效率模型中迭代更新状态量和输出量,包括:
[0126]
根据实时姿态角数据更新状态量的加权均值,状态量加权均值中的向量η即是各舵面的效率:
[0127][0128]
式中,为更新后的状态量的加权均值;m为实时姿态角数据,m=[θ ω]
t
为组合导航系统输出的姿态角和姿态角速率;
[0129]
更新状态量的加权协方差
[0130][0131]
更新后的加权协方差作为下一次迭代的初始加权协方差,对状态量进行迭代更新。
[0132]
根据姿态-力矩-舵面效率模型得到状态量和输出量之前,还包括:
[0133]
计算各sigma点状态量x(i)的权值,表达式为:
[0134]
[0135]
式中,w(i)为各sigma点状态量x(i)的权值;κ为无迹变换参数,定义为κ=3-n;n为状态量维数,即常数9。i为sigma点序号
[0136]
可选地,根据舵面效率对无人机进行舵面重构,包括:
[0137]
若主舵面效率大于或等于副舵面生效阈值,则仅控制主舵面输出;
[0138]
若主舵面效率小于副舵面生效阈值,则增加副舵面辅助输出。
[0139]
本实施例中,主舵面输出为δ1=δ,δ为控制器需求舵面,副舵面输出为:
[0140][0141]
其中,δ2为副舵面输出,η0是副舵面生效阈值,γ是主副舵面舵效比。
[0142]
图3为根据本发明实施例示出的舵面重构方法的算法流程示意图。如图3所示,无人机上电之后,首先进行算法初始化,构建状态量非线性状态转移方程,通过方程构建姿态-力矩-舵面效率模型。接着,根据无迹变换参数κ计算各sigma点的加权值w,根据加权值w和姿态-力矩-舵面效率模型计算得到状态量的加权均值μ和加权协方差p。
[0143]
初始化完成之后,输入姿态角、姿态角速率和舵面指令偏转角。根据状态量确定性采样得到sigma点的状态量x。根据状态量非线性状态转移方程更新每个状态量sigma点的状态量x(i)。根据更新后的状态量x(i)得到对应的加权均值和加权协方差。接着根据状态量x(i)计算输出量y,并得到更新后的y的加权均值z和加权协方差s。接着计算状态量x和输出量y的互协方差t。根据互协方差t和加权协方差s计算增益k。根据增益k更新状态量的加权均值和加权协方差状态量加权均值中的向量η即是各舵面的舵面效率。
[0144]
当主舵的舵面效率大于或等于副舵生效阈值时,固定翼无人机的主舵输出控制器的需求舵面在主舵输出,副舵面备用。当主舵面的舵面效率小于副舵面生效阈值时,开始同时通过主舵和副舵输出需求舵面。
[0145]
本发明实施例的舵面重构方法,应用于固定翼无人机,包括:构建姿态-力矩-舵面效率模型;获取组合导航系统输出的实时姿态角数据;根据实时姿态角数据和姿态-力矩-舵面效率模型得到各舵面的舵面效率;根据舵面效率对固定翼无人机进行舵面重构。本发明在不增加设计成本和工艺成本的前提下实现了对无人机舵面的故障检测及重构。
[0146]
本发明实施例还提供了一种舵面重构系统,包括至少一个处理器;以及至少一个存储器,至少一个存储器被耦合到至少一个处理器并且存储用于由至少一个处理器执行的指令,指令当由至少一个处理器执行时,使得系统执行如上所述的舵面重构方法。
[0147]
本实施例执行上述方法步骤的具体过程,详见上述实施例的相关描述,在此不再赘述。
[0148]
本发明实施例还提供一种可读存储介质,可读存储介质上存储有计算机程序指令;计算机程序指令被处理器执行时实现如上所述的舵面重构方法。
[0149]
本实施例执行上述方法步骤的具体过程,详见上述实施例的相关描述,在此不再赘述。
[0150]
以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
[0151]
在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,除
了包含所列的那些要素,而且还可包含没有明确列出的其他要素。
[0152]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。