1.本发明属于农业保护性耕作技术领域,特别涉及不受外界光源干扰的地表秸秆覆盖率快速检测方法及其装置。
背景技术:
2.秸秆覆盖地表是保护性耕作的关键环节,可有效减少地表风蚀、水蚀,显著改善土壤微生物群落组成结构,提高土壤固氮与固碳的能力。2021年9月,农业农村部印发的《全国高标准农田建设规划(2021-2030年)》明确提出采取秸秆还田、增施有机肥、种植绿肥等方式,增加土壤有机质,治理退化耕地,改良土壤结构,提升土壤肥力,并将以实施保护性耕作开展黑土地保护作为土壤改良的示范。秸秆覆盖率为研究秸秆覆盖程度与地表风蚀、水蚀以及土壤物化性质变化提供数据支撑,进而指导农田采取合理秸秆覆盖形式。同时,秸秆覆盖率是检测秸秆还田效果的重要指标,为国家耕地地力保护补贴政策实施提供标准依据。秸秆覆盖率检测对于保护性耕作全面推广、促进农业可持续发展有重要意义。因此,秸秆覆盖率检测是十分必要的。
3.由于田间环境复杂,光照强度、秸秆状态、田间其他非目标物体(如杂草、土壤状态)等变量因素,均给秸秆覆盖率检测带来阻碍。传统秸秆覆盖率检测方式在实际应用中受到制约,检测过程受人的主观影响,人的观察经验与视觉误差均会影响测量结果,且检测速度慢。目前,国内外有利用图像处理技术进行地表覆盖物检测,但仍存在检测环境的光照变量导致图像误分割率高,识别精度低。因此,亟需一种可实现抑制田间复杂环境影响的快速自动检测秸秆覆盖率的方法及其装置。
技术实现要素:
4.本发明的一个目的在于提供不受外界光源干扰的用于地表秸秆覆盖率快速检测的光源可控暗箱装置,该装置提供无外界自然光的完全黑暗立方空间以及可控光源,使地表秸秆图像采集过程不受自然环境光照影响。该装置可挂接于农业机械,用以实时检测地表秸秆覆盖率,减少田间自然环境条件干涉,提高检测精度与检测效率。
5.本发明的另一个目的在于提供不受外界光源干扰的地表秸秆覆盖率快速检测方法,通过调控智能光源设置所需地表图像采集的光照条件与采取掩膜算法,抑制地表绿色杂草对秸秆识别的影响,消除外界光线对图像灰度化的影响,获取精准的检测结果。该检测方法预计检测时间为1.5~2s,与机具前进速度相适应,具有较好的实时性与鲁棒性。
6.为了达到上述目的,本发明提供了如下技术方案:
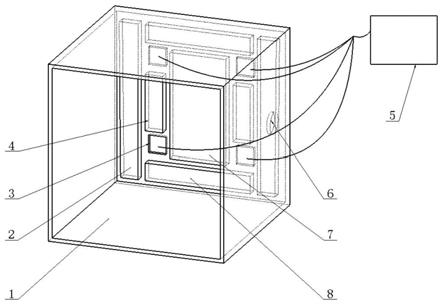
7.一种不受外界光源干扰的地表秸秆覆盖率快速检测装置,所述装置包括:暗箱箱体1、第一智能条形led灯2、工业相机3、第二智能条形led灯4、主机5、光照强度与色温传感器6、第三智能条形led灯7和第四智能条形led灯8;
8.所述暗箱箱体1为下部敞口的立方体,内部涂有不透光涂层,为检测提供无自然环境光影响的密闭环境;
9.四个工业相机3,用于采集暗箱箱体1内的地表图像,分别置于暗箱箱体1的顶部内侧,位于顶面四分区域的中心,且工业相机3的镜头垂直暗箱箱体1的顶面朝向暗箱箱体1的下部敞口,通过线缆与主机5相连;
10.第一智能条形led灯2、第二智能条形led灯4、第三智能条形led灯7和第四智能条形led灯8安装在暗箱箱体1的顶部内侧,由主机5进行无线调控,为图像采集提供特定光源;
11.第一智能条形led灯2、第二智能条形led灯4、第三智能条形led灯7和第四智能条形led灯8的光源照射面积完全覆盖暗箱内地表面积;
12.光照强度与色温传感器6置于暗箱侧壁内部,用以实时监测暗箱内部光线的光照强度与色温,并通过i2c适配器与主机5相连。
13.第三智能条形led灯7为矩形,置于暗箱箱体1的顶面中心且垂直于暗箱箱体1的顶面安装;第三智能条形led灯7的长边侧的外侧的四个角部设有四个工业相机3;
14.第四智能条形led灯8为矩形,一对第四智能条形led灯8对称设置在第三智能条形led灯7的短边侧的外侧,垂直于暗箱箱体1的顶面安装;
15.第二智能条形led灯4为矩形,一对第二智能条形led灯4对称设置在第三智能条形led灯7的长边侧的外侧,垂直于暗箱箱体1的顶面安装;
16.第一智能条形led灯2为矩形,一对第一智能条形led灯2与第二智能条形led灯4平行,且位于第二智能条形led灯4的外侧,垂直于暗箱箱体1的顶面安装。
17.所述暗箱箱体1为q235材质。
18.一种利用如所述的地表秸秆覆盖率快速检测装置的不受外界光源干扰的地表秸秆覆盖率快速检测方法,所述方法包括如下步骤:
19.步骤1、将暗箱箱体1的敞口一侧置于待测秸秆覆盖率的地表上,通过数据传输线将四个工业相机3与主机5相连,第一智能条形led灯2、第二智能条形led灯4、第三智能条形led灯7与第四智能条形led灯与主机5无线相连;通过i2c适配器将光照强度与色温传感器6与主机5相连,并形成稳定通讯;
20.对4个工业相机3进行标定,通过刚体变换、透视投影、二次转换完成三维世界坐标与二维像素坐标的转化,确定地表上每点的几何位置与其在相机获取图像中对应点之间的作用关系;
21.步骤2、通过主机5将第一智能条形led灯2、第二智能条形led灯4、第三智能条形led灯7与第四智能条形led灯8的灯光颜色控制为绿色,光照强度控制为70000~80000lux,色温控制为5200
±
200k;
22.步骤3、标定后的工业相机3获取暗箱内图像,主机5对4个工业相机3采集的地表图像进行图像拼接,其包括图像配准及图像融合,形成分辨率稳定的大视场图像;
23.步骤4、通过索引拆分rgb大视场图像通道,获得图像的b通道、g通道、r通道的数值;
24.步骤5、利用超绿算子z=2g-r-b对图像进行灰度化处理,获取超绿灰度图;
25.步骤6、对获取的超绿灰度图进行自适应阈值分割,将图像中绿色杂草与背景区分开,获得二值化图像;
26.步骤7、查找二值化图像中绿色杂草部分轮廓,确定轮廓的像素位置并计算轮廓内像素总数,轮廓内像素总数与整个图像像素总数的比值即为杂草覆盖率;
27.步骤8、通过主机5将第一智能条形led灯2、第二智能条形led灯4、第三智能条形led灯7与第四智能条形led灯8的灯光颜色调节为自然光,光照强度控制为9000~10000lux,色温控制为4500
±
200k;
28.步骤9、已标定的工业相机3获取暗箱内图像,按照步骤3,主机5对4个工业相机3采集的地表图像进行图像拼接,再次形成分辨率稳定的大视场图像;
29.步骤10、根据步骤7获取的绿色杂草轮廓的像素位置,构造掩膜图像,对步骤9获取的大视场图像进行掩膜运算,获取结果图像,剔除绿色杂草部分对地表秸秆识别的影响;
30.步骤11、采用最大类间方差法对步骤10中的结果图像进行灰度化处理,获得二值图,将结果图像中的地表秸秆与背景分割开;
31.步骤12、对步骤11中的二值图使用形态学函数进行开运算迭代三次,再膨胀迭代两次,以消除图像中的噪声点,获得形态学处理后二值图像;
32.步骤13、查找步骤12中形态学处理后二值图像中秸秆部分轮廓,确定轮廓的像素位置并计算轮廓内像素总数,轮廓内像素总数与步骤3中获取的大视场图像像素总数的比值即为地表秸秆覆盖率。
33.所述步骤2和步骤8中,暗箱内光源调控的方法为:
34.先由主机5将第一智能条形led灯2、第二智能条形led灯4、第三智能条形led灯7与第四智能条形led灯8调控至光源光照强度与色温的设定值;接着第一智能条形led灯2、第二智能条形led灯4、第三智能条形led灯7与第四智能条形led灯8接收主机5的指令信号并响应至光源的设定值,再由光照强度与色温传感器6检测实时暗箱1内部的光照强度与色温数值,并将该数值传输至主机5;接着由主机5将该实时检测值与光源设定值进行对比,若与光源设定值一致,则不执行其他光源调控指令,若与光源设定值不一致,则由主机5重新调控暗箱1内部的第一智能条形led灯2、第二智能条形led灯4、第三智能条形led灯7与第四智能条形led灯8,重复上述过程直至达到光源设定值。
35.与现有技术相比,本发明的有益效果在于:
36.1、本发明申请设计了用于地表秸秆覆盖率快速检测的光源可控暗箱装置,包括暗箱箱体、第一智能条形led灯、第二智能条形led灯、第三智能条形led灯、第四智能条形led灯、光照强度与色温传感器、工业相机和主机;该装置提供无外界自然光的完全黑暗立方空间以及可控光源,使地表秸秆图像采集过程不受自然环境光照影响;
37.2、本发明申请设计了光源可控暗箱装置内部的第一智能条形led灯、第二智能条形led灯、第三智能条形led灯和第四智能条形led灯的布置方式,通过在暗箱箱体1的顶部采取对称式垂直安装方法且光源照射面积完全覆盖暗箱内地表面积,暗箱覆盖区域内的地表可得到均匀一致的光照,消除因光源成角度照射造成光线的高度集中,而导致暗箱内部地表明暗不均以及在地表秸秆上形成光源形状的投影,进而保证工业相机采集地表原始图像的质量;
38.3、设计了基于光源可控暗箱装置的不受外界光源干扰的地表秸秆覆盖率快速检测方法,通过调控智能光源设置所需地表图像采集的光照条件与采取掩膜算法,抑制地表绿色杂草对秸秆识别的影响,消除外界光线对图像灰度化的影响,获取精准的检测结果;
39.4、该装置可挂接于农业机械,用以实时检测地表秸秆覆盖率,减少田间自然环境条件干涉,提高检测精度与检测效率。该检测方法预计检测时间为1.5~2s,与机具前进速
度相适应,具有较好的实时性与鲁棒性。
附图说明
40.图1为本发明的不受外界光源干扰的用于地表秸秆覆盖率快速检测的光源可控暗箱装置的顶视结构示意图;
41.图2为本发明的不受外界光源干扰的用于地表秸秆覆盖率快速检测的光源可控暗箱装置的正视结构示意图;
42.图3为本发明的不受外界光源干扰的用于地表秸秆覆盖率快速检测的光源可控暗箱装置的纵向剖切视图;
43.图4为本发明的不受外界光源干扰的用于地表秸秆覆盖率快速检测的光源可控暗箱装置的工作原理图;
44.图5为本发明的不受外界光源干扰的地表秸秆覆盖率快速检测方法的流程图;
45.图6为暗箱内光源调控流程图。
46.其中的附图标记为:
47.1、暗箱箱体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2、第一智能条形led灯
48.3、工业相机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
4、第二智能条形led灯
49.5、主机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
6、光照强度与色温传感器
50.7、第三智能条形led灯
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
8、第四智能条形led灯
具体实施方式
51.下面结合附图对本发明的具体实施方式作进一步说明。
52.如图1、图2、图3所示,本发明提供一种用于地表秸秆覆盖率快速检测的光源可控暗箱装置,包括:暗箱箱体1、第一智能条形led灯2、工业相机3、第二智能条形led灯4、主机5、光照强度与色温传感器6、第三智能条形led灯7和第四智能条形led灯8。
53.所述暗箱箱体1为下部敞口的立方体,内部涂有不透光涂层,为检测提供无自然环境光影响的密闭环境。暗箱箱体1的顶部预留四个工业相机3的安装口以及传感器引线口。
54.优选地,所述暗箱箱体1为q235材质。
55.四个工业相机3,用于采集暗箱箱体1内的地表图像,分别置于暗箱箱体1的顶部内侧,位于顶面四分区域的中心,且工业相机3的镜头垂直暗箱箱体1的顶面朝向暗箱箱体1的下部敞口,通过线缆与主机5相连。
56.第一智能条形led灯2、第二智能条形led灯4、第三智能条形led灯7和第四智能条形led灯8安装在暗箱箱体1的顶部内侧,由主机5进行无线调控,为图像采集提供特定光源。其中,
57.第三智能条形led灯7为矩形,置于暗箱箱体1的顶面中心且垂直于暗箱箱体1的顶面安装。第三智能条形led灯7的长边侧的外侧的四个角部设有四个工业相机3。
58.第四智能条形led灯8为矩形,一对第四智能条形led灯8对称设置在第三智能条形led灯7的短边侧的外侧,垂直于暗箱箱体1的顶面安装。
59.第二智能条形led灯4为矩形,一对第二智能条形led灯4对称设置在第三智能条形led灯7的长边侧的外侧,垂直于暗箱箱体1的顶面安装。
60.第一智能条形led灯2为矩形,一对第一智能条形led灯2与第二智能条形led灯4平行,且位于第二智能条形led灯4的外侧,垂直于暗箱箱体1的顶面安装。
61.第一智能条形led灯2、第二智能条形led灯4、第三智能条形led灯7和第四智能条形led灯8的光源照射面积完全覆盖暗箱内地表面积。
62.光照强度与色温传感器6置于暗箱侧壁内部,用以实时监测暗箱内部光线的光照强度与色温,并通过i2c适配器与主机5相连。所测得的数据与光源初始设定值匹配比较,从而保持暗箱内光源一直处于预设状态。
63.图4为本发明的不受外界光源干扰的用于地表秸秆覆盖率快速检测的光源可控暗箱装置的工作原理图。暗箱箱体1提供无外界光线的检测空间,工作时其敞口一面置于地面;第一智能条形led灯2、第二智能条形led灯4、第三智能条形led灯7与第四智能条形led灯8为四种不同尺寸类型的智能条形led灯,为地面秸秆覆盖率检测提供可控光源,其颜色与色温无极变化,由主机5调控;工业相机3由主机5控制采集暗箱内地表图片,并将图片传输到主机5;光照强度与色温传感器6实时监测暗箱内光照强度与色温,并将测得数据实施传输至主机5,形成传感器、主机、智能条形led灯三者之间的闭环控制,使暗箱内光源条件稳定在设置状态。
64.图6为暗箱内光源调控流程图。先由主机5将第一智能条形led灯2、第二智能条形led灯4、第三智能条形led灯7与第四智能条形led灯8调控至光源光照强度与色温的设定值;接着第一智能条形led灯2、第二智能条形led灯4、第三智能条形led灯7与第四智能条形led灯8接收主机5的指令信号并响应至光源的设定值,再由光照强度与色温传感器6检测实时暗箱1内部的光照强度与色温数值,并将该数值传输至主机5;接着由主机5将该实时检测值与光源设定值进行对比,若与光源设定值一致,则不执行其他光源调控指令,若与光源设定值不一致,则由主机5重新调控暗箱1内部的第一智能条形led灯2、第二智能条形led灯4、第三智能条形led灯7与第四智能条形led灯8,重复上述过程直至达到光源设定值。
65.如图5所示,本发明提供基于上述装置的不受外界光源干扰的地表秸秆覆盖率快速检测方法,先对箱体内部的工业相机3进行标定,为后续单个相机采集的图像进行拼接准备;再分别将暗箱内光源调控为特定范围内光照强度与色温的绿光与自然光,利用超绿算子灰度化原始拼接图像,精准提取绿色杂草部分;对自然光光源下采集的图像进行掩膜运算,利用最大类间方差阈值分割算法与形态学运算处理图像,获取图像中秸秆部分像素总数,进而得到暗箱覆盖区域的地表秸秆覆盖率,所述方法包括如下步骤:
66.步骤1、将暗箱箱体1的敞口一侧置于待测秸秆覆盖率的地表上,通过数据传输线将四个工业相机3与主机5相连,第一智能条形led灯2、第二智能条形led灯4、第三智能条形led灯7与第四智能条形led灯与主机5无线相连;通过i2c适配器将光照强度与色温传感器6与主机5相连,并形成稳定通讯。
67.对4个工业相机3进行标定,通过刚体变换、透视投影、二次转换完成三维世界坐标与二维像素坐标的转化,确定地表上每点的几何位置与其在相机获取图像中对应点之间的作用关系;
68.步骤2、通过主机5将第一智能条形led灯2、第二智能条形led灯4、第三智能条形led灯7与第四智能条形led灯8的灯光颜色控制为绿色,光照强度控制为70000~80000lux,色温控制为5200
±
200k;
69.步骤3、标定后的工业相机3获取暗箱内图像,主机5对4个工业相机3采集的地表图像进行图像拼接,其包括图像配准及图像融合,形成分辨率稳定的大视场图像;
70.步骤4、通过索引拆分rgb大视场图像通道,获得图像的b(蓝色)通道、g(绿色)通道、r(红色)通道的数值;
71.步骤5、利用超绿算子z=2g-r-b对图像进行灰度化处理,获取超绿灰度图;
72.步骤6、对获取的超绿灰度图进行自适应阈值分割,将图像中绿色杂草与背景区分开,获得二值化图像;
73.步骤7、查找二值化图像中绿色杂草部分轮廓,确定轮廓的像素位置并计算轮廓内像素总数,轮廓内像素总数与整个图像像素总数的比值即为杂草覆盖率;
74.步骤8、通过主机5将第一智能条形led灯2、第二智能条形led灯4、第三智能条形led灯7与第四智能条形led灯8的灯光颜色调节为自然光,光照强度控制为9000~10000lux,色温控制为4500
±
200k;
75.步骤9、已标定的工业相机3获取暗箱内图像,按照步骤3,主机5对4个工业相机3采集的地表图像进行图像拼接,再次形成分辨率稳定的大视场图像;
76.步骤10、根据步骤7获取的绿色杂草轮廓的像素位置,构造掩膜图像,对步骤9获取的大视场图像进行掩膜运算,获取结果图像,剔除绿色杂草部分对地表秸秆识别的影响;
77.步骤11、采用最大类间方差法对步骤10中的结果图像进行灰度化处理,获得二值图,将结果图像中的地表秸秆与背景分割开;
78.步骤12、对步骤11中的二值图使用形态学函数进行开运算迭代三次,再膨胀迭代两次,以消除图像中的噪声点,获得形态学处理后二值图像;
79.步骤13、查找步骤12中形态学处理后二值图像中秸秆部分轮廓,确定轮廓的像素位置并计算轮廓内像素总数,轮廓内像素总数与步骤3中获取的大视场图像像素总数的比值即为地表秸秆覆盖率。
80.所述步骤2和步骤8中,暗箱内光源调控的方法为:
81.先由主机5将第一智能条形led灯2、第二智能条形led灯4、第三智能条形led灯7与第四智能条形led灯8调控至光源光照强度与色温的设定值;接着第一智能条形led灯2、第二智能条形led灯4、第三智能条形led灯7与第四智能条形led灯8接收主机5的指令信号并响应至光源的设定值,再由光照强度与色温传感器6检测实时暗箱1内部的光照强度与色温数值,并将该数值传输至主机5;接着由主机5将该实时检测值与光源设定值进行对比,若与光源设定值一致,则不执行其他光源调控指令,若与光源设定值不一致,则由主机5重新调控暗箱1内部的第一智能条形led灯2、第二智能条形led灯4、第三智能条形led灯7与第四智能条形led灯8,重复上述过程直至达到光源设定值。
82.下面结合实施例对上述不受外界光源干扰的地表秸秆覆盖率快速检测方法进行叙述。
83.步骤1、将暗箱箱体1的敞口一侧置于待测秸秆覆盖率的地表上,通过数据传输线将四个工业相机3与主机5相连,第一智能条形led灯2、第二智能条形led灯4、第三智能条形led灯7与第四智能条形led灯与主机5无线相连;通过i2c适配器将光照强度与色温传感器6与主机5相连,并形成稳定通讯。
84.对暗箱内部4个工业相机3进行标定,通过刚体变换、透视投影、二次转换完成三维
世界坐标与二维像素坐标的转化,确定地表上某点几何位置与其在相机获取图像中对应点之间的作用关系;
85.其中,刚体变换为世界坐标系与相机坐标系之间的转换,转换矩阵为式中,r为旋转矩阵,与相机坐标系和世界坐标系之间的相对位置有关;t为平移矢量,与相机坐标系和世界坐标系之间的相对位置有关;(u v w)为世界坐标系下某一几何点的三维物理坐标,单位为m;
86.透视投影为相机坐标系与图像坐标系之间的转换,转换矩阵为式中,f为相机焦距,单位mm,是相机内部参数;
87.二次转换为图像坐标系与相机像素坐标系之间的转换,转换矩阵为式中,x为相机感光元件上像素坐标系某一方向;y为相机感光元件上像素坐标系与x垂直的方向;dx为相机感光元件上像素坐标系x方向上的一个像素的物理长度,单位为mm;dy为相机感光元件上像素坐标系y方向上的一个像素的物理长度,单位为mm;u0、v0为相机感光元件的中心在相机像素坐标下的坐标,单位为pixel;α为相机感光元件的横边与纵边之间的夹角,单位为度;
88.根据以上转换矩阵,三维世界坐标与二维像素坐标的转化公式为式中,z为像素比例因子;(u v)为世界坐标系下某一几何点对应的在相机像素坐标系下的二维像素坐标,单位为pixel;通过求解转换矩阵,获取地表上某点几何位置与其在相机获取图像中对应点之间的转换关系。
89.步骤2、通过主机5将第一智能条形led灯2、第二智能条形led灯4、第三智能条形led灯7与第四智能条形led灯8的灯光颜色控制为绿色,光照强度控制为70000~80000lux,色温控制为5200
±
200k;
90.步骤3、标定后的工业相机3获取暗箱内图像,主机5对4个工业相机3采集的地表图像进行图像拼接,其包括图像配准及图像融合,形成分辨率稳定的大视场图像;其中,采取可快速实现图像特征点提取与匹配的orb(oriented fast and rotated brief)算法;通过迭代后的变换矩阵实现图像配准;最后通过变换域中的小波变换,小波基选择为biorthogonal小波,完成配准图像之后的图像融合;
91.步骤4、通过索引拆分rgb大视场图像的三个通道,获得图像的b(蓝色)通道、g(绿色)通道、r(红色)通道的数值;其中,在python中的各个通道的索引表达式为,b=img[:,:,0],g=img[:,:,1],r=img[:,:,2],式中,img为获取的图像融合之后的大视场图像;
[0092]
步骤5、利用超绿算子z=2g-r-b对图像进行灰度化处理,获取超绿灰度图;其中,灰度化处理函数为式中,(x,y)为图像像素点坐标,单位为pixel;max val为分割阈值最大值,取max val=255;thresh为分割阈值最小值,取thresh=185;
[0093]
步骤6、对获取的超绿灰度图进行自适应阈值分割,将图像中绿色杂草与背景区分开,获得二值化图像;其中,采取高斯方程方法确定自适应阈值,计算自适应阈值时所使用的邻域尺寸为5;
[0094]
步骤7、查找二值化图像中绿色杂草部分轮廓,确定轮廓的像素位置并计算轮廓内像素总数n0,轮廓内像素总数n0与整个图像像素总数n的比值即为杂草覆盖率;其中,查找轮廓时采取只检测外轮廓的轮廓提取方式,不建立等级关系;
[0095]
步骤8、通过主机5将第一智能条形led灯2、第二智能条形led灯4、第三智能条形led灯7与第四智能条形led灯8的灯光颜色调节为自然光,光照强度控制为9000~10000lux,色温控制为4500
±
200k;
[0096]
步骤9、已标定的工业相机3获取暗箱内图像,按照步骤3,主机5对4个工业相机3采集的地表图像进行图像拼接,再次形成分辨率稳定的大视场图像;
[0097]
步骤10、根据步骤7获取的绿色杂草轮廓的像素位置,构造掩膜图像,通过按位与函数对大视场图像进行掩膜运算,获取结果图像,剔除绿色杂草部分对地表秸秆识别的影响;
[0098]
步骤11、采用最大类间方差法对步骤10中的结果图像进行灰度化处理,获得二值图,将结果图像中的地表秸秆与背景分割开;其中,最大类间差方法中分割阈值最小值设置为0,分割阈值最大值设置为255,从而自动寻找最优分割阈值;
[0099]
步骤12、对步骤11中的二值图使用形态学函数进行开运算迭代三次,再膨胀迭代两次,以消除图像中的噪声点,获得形态学处理后二值图像;其中,进行开运算操作时,通过核函数生成腐蚀操作与膨胀操作的结构元,开运算迭代三次;进行膨胀操作时,再次通过核函数生成膨胀操作的结构元,膨胀操作迭代两次;
[0100]
步骤13、查找步骤12中形态学处理后二值图像中秸秆部分轮廓,确定轮廓的像素位置并计算轮廓内像素总数,轮廓内像素总数n1与步骤3中获取的大视场图像像素总数n的比值即为地表秸秆覆盖率η,表达式为其中,查找轮廓时采取只检测外轮廓的轮廓提取方式,不建立等级关系。
[0101]
本发明的工作过程为:
[0102]
在进行秸秆覆盖率检测时,将光源暗箱敞口的一侧垂直置于所需检测的地表上,连接各个部分之间的线缆。设定暗箱内光源,主机根据光照强度与色温传感器数据实时调控光线,并控制四个工业相机3同时采集图像,完成图像拼接后利用不同的图像灰度化算法,先确定绿色杂草像素位置并抑制其显像,再在特定光源条件下确定获取的拼接图像中
秸秆的像素位置。通过灰度图中秸秆部分像素总数在整个拼接图像中的占比,计算获取该区域内地表秸秆覆盖率。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。