技术特征:
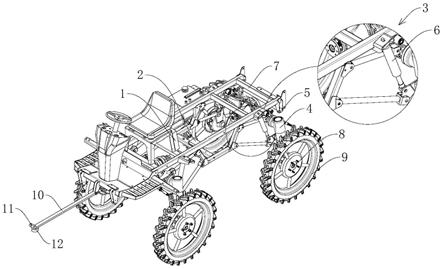
1.一种高地隙植保机车身姿态平衡调整控制系统,包括植保机本体,其特征在于:所述植保机本体包括有车架(7),所述车架(7)上固定安装有植保机底盘姿态调平系统,所述植保机调平系统包括有输入模块(1),所述输入模块(1)固定安装在植保机本体的车身平台上,所述车架(7)中心位置上还固定安装有倾角传感器(2),所述车架(7)的四角处安装有底盘悬架(3),所述植保机本体的底盘悬架(3)与车桥总成(4)采用多连杆式非独立悬架结构,所述多连杆式非独立悬架结构上的连杆的铰接端两侧均安装有橡胶套(5),所述底盘悬架(3)上还铰接有双作用液压缸(6),所述双作用液压缸(6)上固定安装有位移传感器,所述双作用液压缸(6)的底端通过管路固定连接有无级变速器(13),所述无级变速器(13)的机械动力输出端固定连接有车轮(9),所述车轮(9)上固定安装有轮速传感器(8);所述车架(7)的前部固定连接有安装支架(10),所述安装支架(10)的末端固定连接有激光雷达(11)和深度相机(12)。2.根据权利要求1所述的一种高地隙植保机车身姿态平衡调整控制系统所使用的一种高地隙植保机车身姿态平衡调整控制方法,其特征在于,包括以下步骤:s1、用户根据经验输入设定平面倾斜倾角标准区间[a,b],标准平整度区间[c,d],植保机开始工作,进入下步操作,否则进入被动蓄能器补充调节状态;s2、通过轮速传感器(8)来获取车辆的行进速度v,通过深度相机(12)获取植保机在当前行驶方向上的田间路面信息,通过激光雷达(11)实时获取植保机通过路面平整度;s3、进行田间路面信息融合处理,提取两侧车轮(9)运动轨迹路线,预判车辆将通过的路线轨迹中路面的不平整度、目标物位置坐标信息及空间形状数据;s4、若前方发现目标物,则计算预计到达时间t、坑深h和每个双作用液压缸(6)的高度控制量δh,否则进行单一信息调整状态,靠实时采集车身倾角值x、y,判断x、y是否在区间[a,b]内,在则无需微调,不在则进行微调控制;s5、通过位移传感器分别将四个双作用液压缸(6)高度值h1、h2、h3、h4反馈给控制系统,判断是否超出双作用液压缸(6)量程;s6、若δh h超过双作用液压缸(6)的最大量程,则将高度调整量δh置为双作用液压缸(6)的最大量程l
max
,发出每个双作用液压缸(6)的高度控制量的指令,在时间t内进行快速响应调节,使工作平面趋于水平,防止侧翻及滚落;s7、采集震动开始时车身倾角值x0、y0,比较倾角值x0、y0与区间[a,b]大小关系,微调双作用液压缸(6)的高度变化量,做到精确控制;s8、车身姿态回正后,再次进行s2中所述操作,得到新的指令,重复s3~s7所述操作,形成一个闭环控制。3.根据权利要求2所述的一种高地隙植保机车身姿态平衡调整控制方法,其特征在于,所述s1中提到的平面倾斜倾角标准区间[a,b],是根据经验设置的车辆最佳工作状态下倾角区间。4.根据权利要求2所述的一种高地隙植保机车身姿态平衡调整控制方法,其特征在于,所述s2中提到的车速测量、田间路面信息获取以及路面平整度测量,具体包括以下操作:a1、将固定连接有轮速传感器(8)的齿数为n的齿轮环盘固定安装在车轮(9)轴盘上;a2、在车辆运作时,利用轮速传感器(8)实时获取车轮(9)轴盘运行圈数,进而获取车轮(9)的角速度w,根据公式v=wr,计算得到行进速度v;
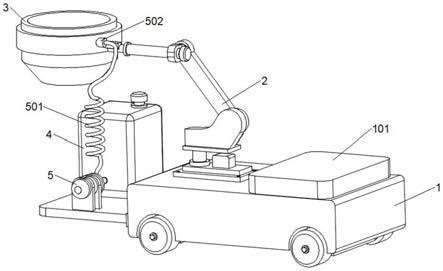
a3、以激光雷达(11)为中心原点建立空间坐标系,车身横梁方向为x轴,车辆纵梁方向为y轴,竖直方向为z轴;a4、采用深度相机(12)获得目标物位置信息(x,y,z)及目标物数量c;a5、将激光雷达(11)安装在植保机本体的车架(7)前沿伸出的安装支架(10)末端中间位置处,距前轮轴线长度为l0,通过前置的激光雷达(11)实时获取植保机通过路面平整度。5.根据权利要求2所述的一种高地隙植保机车身姿态平衡调整控制方法,其特征在于,所述s3~s7中提到的的信息融合处理与控制策略,具体包括以下操作:b1、利用植保机本体的安装支架(10)前端固定连接的激光雷达(11)和深度相机(12)提前采集道路信息;b2、将倾角传感器(2)固定安装在植保机本体车身上预留的可机械调整角度的平面上,整体位于植保机本体的中心位置,其中机械调整装置目的是避免由于其他因素导致起始位置倾角传感器(2)采集值不为0,可手动调整;b3、将位移传感器固定安装在双作用液压缸(6)上,紧贴缸壁,利用u型支架进行固定,且缸体上端设置一个小圆弧片,作为传感器伸出端的导槽,避免在车辆姿态调整时传感器前部端子因位置改变而损坏传感器,确保精度;b4、利用深度相机(12)采集图像,经过处理获取到目标物的位置信息,然后比对车轮(9)所在直角坐标系中的轨迹路线,如果位置坐标与车轮轨迹线坐标吻合,启动激光雷达(11)扫描田间土壤表层,生成一条可以计算坑深的基准线,生成三维点云图,与深度相机(12)信息融合,以激光雷达(11)位置中心为原点坐标建立坐标系,根据激光雷达(11)位置和分辨率可知轨迹横坐标关系式:x1=l
n
sin(nα)式中,x1为直角坐标系中车轮轨迹线处的土壤表层基准线,l
n
为激光雷达(11)的第n条线刚好扫描到的车轮轨迹线,α为激光雷达(11)分辨率,n为车轮轨迹线夹角;b5、植保机本体的车架(7)中心位置还固定安装有角度传感器,利用角度传感器获取整体车身平面的夹角度数,再通过角度大小实时反馈旋液压缸的高度量进行标定,液压缸提升的高度与角度变化函数关系式为:δh=l
·
sinδθ式中,δh为旋液压缸提升的高度,l为车轮轴距,δθ为平面的角度变化,通过角度传感器获得。6.根据权利要求2所述的一种高地隙植保机车身姿态平衡调整控制方法,其特征在于,所述s4中提到的单一信息调整控制策略,具体包括以下操作:c1、若倾角x、y均在预设的倾角标准区间[a,b]内,高度变量液压缸的高度保持不变;c2、若倾角不在评测标准区间[a,b]内,比较x、y分别与整个区间[a,b]的关系,具体包括以下情况:c2.1、情况1:若x大于整个区间[a,b],y在预设的倾角标准区间[a,b]内,则植保机控制调平方式为以四个双作用液压缸(6)相对中间位置为基点,其中h1为左前方液压缸高度,h2为右前方液压缸高度,h3为左后方液压缸高度,h4为右后方液压缸高度,将h1和h3为一组,h2和h4为一组,其调节量:
则δh1=h
1-δh,δh2=h
2-δh,δh3=h
3-δh,δh4=h
4-δh;c2.2、情况2:若y大于整个区间[a,b],x在预设的倾角标准区间[a,b]内,则植保机控制调平方式为以四个双作用液压缸(6)相对中间位置为基点,h1和h2为一组,h3和h4为一组,其调节量:则δh1=h
1-δh,δh2=h
2-δh,δh3=h
3-δh,δh4=h
4-δh;c2.3、情况3:若y不属于整个区间[a,b],x也不在预设的倾角标准区间[a,b]内,则植保机控制调平方式为以四个双作用液压缸(6)相对中间位置为基点,优先完成侧倾角调平,再调整俯仰角;c3、双作用液压缸(6)最大伸出参数为l
max
,为避免液压缸过调,出现故障,通过程序进行限位,当调整量接近l
max
时,进行程序中断。
技术总结
本发明公开了一种高地隙植保机车身姿态平衡控制系统及方法,属于植保机控制领域。控制系统与方法相匹配,其方法包括以下步骤:S1、根据经验输入平台标准倾斜角区间[a,b],路面平整度区间[c,d];S2、获取车辆的速度V和行驶方向上的路面信息;S3、预测车辆通过路面的平整度、坑深参数以及位置信息;S4、发现目标物,计算出到达时间t、坑深H、液压缸的高度控制量ΔH;S5、位移传感器实时将液压缸高度值反馈给控制系统,判断是否超出量程;S6、发出调控指令,使平台趋于水平,防止侧翻;S7、采集震动时底盘倾角值进行微调,姿态回正,再次进入S2,形成闭环控制。本发明解决了现有大型植保机作业平台不能根据实地路面平整度不同自动调节的问题。问题。问题。
技术研发人员:蔡增宾 刘立超 陈黎卿 郑泉 张春岭 万玲 刘红基
受保护的技术使用者:安徽农业大学
技术研发日:2022.01.26
技术公布日:2022/4/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。