1.本发明涉及靶车制造的技术领域,特别涉及一种无人驾驶仿形靶车。
背景技术:
2.无人驾驶或遥控驾驶的轮式仿形靶车由于实用性强、训练效果显著且机动性好,所以,目前轮式仿形靶车已成为现役靶车中的主流,为了能够适应于大量列装部队使用,并能够满足部队对火力打击装备的战术训练、操作训练、基本达到部队实战化训练需求。而现有装甲靶车舱盖存在以下缺点:整个目标特性模拟组件的体积庞大,即便是按照蒙皮面积划分为1
㎡‑2㎡
左右的含框架及蒙皮的壳体单元,仍然重量较大,需要叉车等辅助工具才能完成拆装。而且现有目标特性模拟组件的壳体单元和主框架采用螺栓固定,但是在车长为近10米、车宽约为3.7米的较大作业范围内,在生产中累计公差大且壳体单元重量较大的情况下,很难在较短时间内轻松地完成目标特性模拟组件的拆装。另外,现有目标特性模拟组件是将外蒙皮与辅助框架焊接固定在一起,形成不规则的立方体,虽然拆分后块数较少,但是因为体积大、不可进一步拆卸及折叠,装箱时占用空间大,需要花费较大成本制作储物箱,并且不便于运输。
技术实现要素:
3.本发明的目的是提供一种无人驾驶仿形靶车,通过连接组件与主框架连接,可将主框架的左右两侧加宽,装配后实现仿形的立体效果;由于是可拆卸连接,将连接组件和第一仿形组件均可从主框架上拆卸,方便了生产、储存和运输。
4.本发明的第一方面提供了一种无人驾驶仿形靶车,包括:靶车本体,其配置为能够无人驾驶移动;主框架,其套设在所述靶车本体上,所述主框架与所述靶车本体连接固定,且所述靶车本体的前后和左右均位于所述主框架范围内;连接组件,其与所述主框架可拆卸连接,且所述连接组件的长度沿背离所述主框架的方向延伸;第一仿形组件,其与所述连接组件连接固定;第一仿形组件通过连接组件连接于主框架上。
5.可选的,所述主框架包括两个相对设置的侧框和两个相对设置的边框,所述主框架由侧框和边框围合而成;所述侧框沿所述靶车本体的前后方向延伸,所述边框沿所述靶车本体的左右方向延伸;所述侧框包括上下间隔设置的第一支架和第二支架,所述第一支架和第二支架之间设有若干个竖筋和斜筋,所述竖筋的两端分别与所述第一支架和第二支架连接,所述斜筋的两端分别与所述第一支架和第二支架连接,所述竖筋间隔设置,斜筋位于相邻的两个所述竖筋之间。
6.可选的,所述连接组件包括插接机构和与所述插接机构一侧连接的支撑架;所述插接机构和所述第一支架可拆卸连接,所述支撑架向背离所述第一支架的方向延伸;所述支撑架可折叠。
7.可选的,所述插接机构设有凹槽,所述凹槽与所述第一支架配合连接;所述插接机构包括第一杆和两个相对且间隔设置的第二杆,所述第二杆的顶端与所述第一杆的底面连
接,所述第一杆和两个所述第二杆之间构成所述凹槽,所述凹槽为方形;所述第一支架为矩形管,所述插接机构由上向下插入所述第一支架,所述凹槽与矩形管配合,以使所述连接组件与所述第一支架的相对位置固定。
8.可选的,所述支撑架包括第一连杆、第二连杆和第三连杆;所述第二连杆和第三连杆的一端均与所述第一连杆铰接,所述第二连杆的另一端向背离所述第一连杆的方向延伸,所述第三连杆的另一端与所述第二连杆连接;所述第一连杆的一侧与所述插接机构连接;当所述支撑架折叠时,所述第三连杆的另一端沿所述第二连杆滑动至背离所述第一连杆的另一端。
9.可选的,所述支撑架还包括固定装置,所述固定装置与所述第三连杆的另一端连接;当所述支撑架承载时,所述固定装置将所述第三连杆的另一端与所述第二连杆的相对位置固定。
10.可选的,所述第二连杆包括顶板和两个相对且间隔设置的侧板,所述侧板的顶端与所述顶板的底面连接;所述第三连杆的另一端与所述侧板的连接处具有连接轴,所述侧板设有滑槽,所述滑槽沿所述第二连杆的长度方向设置,所述连接轴与所述滑槽滑动配合;所述固定装置包括固定块和固定销,所述固定块的一端与连接轴连接,所述固定块的另一端与所述固定销连接,所述固定块设于两个所述侧板之间,所述固定销穿过所述固定块和两个所述侧板。
11.可选的,所述第一仿形组件包括蒙皮、裙板和履带,所述蒙皮与所述支撑架连接固定,所述裙板的顶端与所述蒙皮可拆卸连接,所述履带与所述侧框连接,所述履带位于所述裙板的内侧。
12.可选的,无人驾驶仿形靶车还包括升降组件,所述升降组件用于将所述履带沿所述侧框上下升降;所述升降组件包括:连接结构件、滑轨和驱动机构;所述滑轨与所述侧框连接,所述滑轨的长度沿所述靶车本体的高度方向延伸;所述连接结构件的一侧与所述履带连接固定,所述连接结构件的另一侧具有滑块,所述滑块与所述滑轨滑动连接;所述驱动机构安装于所述侧框上,所述驱动机构具有推头,所述推头与所述连接结构件具有所述滑块的一侧连接。
13.可选的,所述蒙皮和所述裙板均沿所述靶车本体的前后方向设为可折叠。
14.可选的,无人驾驶仿形靶车还包括上框架和第三仿形组件;所述上框架的底端与两个所述侧框连接,所述上框架的顶端高于所述靶车本体的顶端,且多个所述上框架间隔设置于所述侧框上;所述第三仿形组件覆盖多个所述上框架。
15.可选的,无人驾驶仿形靶车还包括地面控制设备和车载控制系统;所述车载控制系统用于对所述靶车本体实现无人驾驶智能感知和驾驶实时控制;所述地面控制设备与所述车载控制系统电连接,所述地面控制设备包括手持终端,所述手持终端用于对所述靶车本体实现遥控。
16.本发明的上述技术方案至少具有如下有益的技术效果:
17.1、本发明实施例提供的无人驾驶仿形靶车,具备便于拆卸的优点,可以不借助大型叉车、吊车等,即可人工拆装。
18.2、本发明实施例提供的无人驾驶仿形靶车,便于收纳,可折叠储存,放置于较小的箱体内,节约箱体的制作成本和存放空间。
19.3、本发明实施例提供的无人驾驶仿形靶车,采用轻量化设计,可降低成本。
20.4、本发明实施例提供的无人驾驶仿形靶车,将第一仿形组件、第二仿形组件和第三仿形组件作为几个大的单件来生产、储存和运输,装配后实现仿形的立体效果;并且可替换率高、便于部分替换维修并且节省维修时间。
附图说明
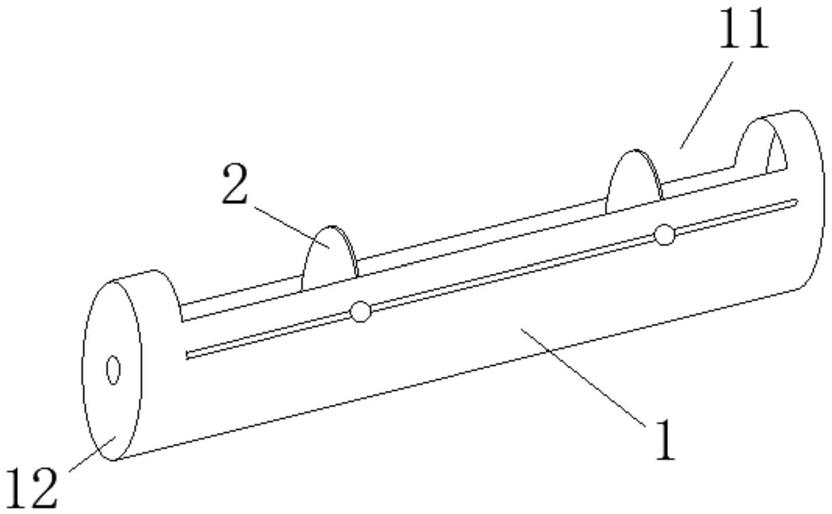
21.图1是根据本发明实施例提供的靶车本体的结构示意图;
22.图2是根据本发明第一实施方式的无人驾驶仿形靶车的结构示意图;
23.图3是根据本发明第二实施方式的无人驾驶仿形靶车的结构示意图;
24.图4是根据本发明第三实施方式的无人驾驶仿形靶车的结构示意图;
25.图5是根据本发明实施例提供的连接组件的安装示意图;
26.图6是根据本发明实施例提供的连接组件的结构示意图;
27.图7是根据本发明实施例提供的折叠后的连接组件的结构示意图;
28.图8是图6的ⅰ处放大局部剖视图;
29.图9是根据本发明实施例提供的裙板的结构示意图;
30.图10示意性地示出升降机构的结构示意图(去掉裙板);
31.图11示意性地示出手持终端的结构示意图;
32.附图标记:
33.11-靶车本体;12-主框架;13-连接组件;14-第一仿形组件;15-第二仿形组件;16-插接机构;17-支撑架;18-凹槽;19-连接轴;20-滑槽;21-固定块;22-固定销;23-蒙皮;24-裙板;25-履带;26-连接结构件;27-滑轨;28-驱动机构;29-上框架;30-第三仿形组件;31-手持终端;
34.121-侧框;122-边框;1211-第一支架;1212-第二支架;151-前部壳体单元;152-后部壳体单元;171-第一连杆;172-第二连杆;173-第三连杆;301-炮塔;302-护栏。
具体实施方式
35.为使本发明的目的、技术方案和优点更加清楚明了,下面结合具体实施方式并参照附图,对本发明进一步详细说明。应该理解,这些描述只是示例性的,而并非要限制本发明的范围。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本发明的概念。
36.可以理解,本技术所使用的术语“第一”、“第二”等可在本文中用于描述各种元件,但这些元件不受这些术语限制。这些术语仅用于将第一个元件与另一个元件区分。举例来说,在不脱离本技术的范围的情况下,可以将第一电阻称为第二电阻,且类似地,可将第二电阻称为第一电阻。第一电阻和第二电阻两者都是电阻,但其不是同一电阻。
37.一种无人驾驶仿形靶车,如图2-图4所示,包括:靶车本体11,其配置为能够无人驾驶移动;主框架12,其套设在所述靶车本体11上,所述主框架12与所述靶车本体11连接固定,且所述靶车本体11的前后和左右均位于所述主框架12范围内;连接组件13,其与所述主框架12可拆卸连接,且所述连接组件13的长度沿背离所述主框架12的方向延伸;第一仿形组件14,其与所述连接组件13连接固定;第一仿形组件14通过连接组件13连接于主框架12
上。本发明实施例提供的无人驾驶仿形靶车还可包括第二仿形组件15,第一仿形组件14可用于覆盖连接组件13的上表面及遮挡主框架12的侧面;第二仿形组件15,可用于覆盖所述主框架12的上表面、前端面和后端面。
38.如图1所示的靶车本体11,可选用燃油动力型车,靶车本体11可包含动力、传动、制动、转向、车架、悬架、轮系、舱室等,这样可实现无人驾驶移动。本发明实施例为了实现对坦克等目标的模拟功能,第二仿形组件15例如可以是蒙皮,覆盖于主框架12的上表面、前端面和后端面,蒙皮可与主框架12的上表面、前端面和后端面连接,因此可形成仿形靶车的前部壳体单元151和后部壳体单元152;第一仿形组件14例如可以是蒙皮、裙板和履带等,可覆盖所述连接组件13的上表面及遮挡所述主框架12的侧面,第一仿形组件14与连接组件13可采用螺栓或旋转卡扣连接固定,方便拆卸与安装;并可在靶车本体11的顶部可套设仿形坦克的炮塔和护栏等,由此靶车本体11可仿形为坦克,具备基本的运动目标特性,可自主驾驶或遥控驾驶,能够满足部队对火力打击装备的战术训练和操作训练需求。通过连接组件13与主框架12连接,可将主框架12的左右两侧加宽,装配后实现仿形的立体效果;由于是可拆卸连接,将连接组件13和第一仿形组件14均可从主框架12上拆卸,方便了生产、储存和运输。
39.一些实施例中,所述主框架12包括两个相对且间隔设置的侧框121和两个相对且间隔设置的边框122,所述主框架12由侧框121和边框122围合而成;所述侧框121沿所述靶车本体11的前后方向延伸,所述边框122沿所述靶车本体11的左右方向延伸;所述侧框121包括上下间隔设置的第一支架1211和第二支架1212,所述第一支架和第二支架之间设有若干个竖筋和斜筋,所述竖筋的两端分别与所述第一支架和第二支架连接,所述斜筋的两端分别与所述第一支架和第二支架连接,所述竖筋间隔设置,斜筋位于相邻的两个所述竖筋之间。同理,边框122也可由上下间隔设置的第一支架和第二支架,以及若干个竖筋和斜筋焊接而成;第一支架1211和第二支架1212可选用矩形钢管制作,若干个竖筋和斜筋也可选用矩形钢管制作,因此主框架12可由矩形钢管焊接组成,且竖筋和斜筋间隔设置,在保证主框架12整体的承载强度时,可实现主框架12的轻量化设计。
40.一些实施例中,无人驾驶仿形靶车还包括上框架29和第三仿形组件30;所述上框架的底端与两个所述侧框121连接,所述上框架的顶端高于所述靶车本体11的顶端,且多个所述上框架29间隔设置于所述侧框121上;所述第三仿形组件30覆盖多个所述上框架29。第三仿形组件30可制作成仿形坦克的炮塔301和护栏302等,上框架29可选用钢管制作,可焊接成
┏┓
形,两个立柱可横跨在两个侧框121上,为了与第三仿形组件30的内壳匹配,也便于安装和拆卸,可在上框架29的两个立柱的左右两侧均焊接斜支撑,两个斜支撑的间距由上往下逐渐增大,这样安装时第三仿形组件30从上往下可逐渐套设在上框架29上。护栏302由铝管制造,通过插套和发夹销穿孔固定,实现可快速拆卸,堆叠存放不占用空间。本发明实施例提供的无人驾驶仿形靶车具备基本模拟特性(含光学、雷达和引信引爆特性)、轻量化且可快速拆装、通过性良好的高拟真度仿形靶车。
41.一些实施例中,如图5-图8所示,所述连接组件13包括插接机构16和与所述插接机构16一侧连接的支撑架17;所述插接机构16和所述第一支架1211可拆卸连接,所述支撑架17向背离所述第一支架1211的方向延伸;所述支撑架17可折叠。插接机构16和支撑架17可焊接为一个整体,插接机构16可卡接在第一支架1211上,通过插拔可实现拆卸连接;支撑架17可采用液压机构实现折叠与支撑承载。为了轻量化设计,连接组件13连接组件可采用铝
管、铝型材制作。
42.一些实施例中,所述插接机构16设有凹槽18,所述凹槽18与所述第一支架1211配合连接;所述插接机构16包括第一杆和两个相对且间隔设置的第二杆,所述第二杆的顶端与所述第一杆的底面连接,所述第一杆和两个所述第二杆之间构成所述凹槽18,所述凹槽18为方形;所述第一支架1211为矩形管,所述插接机构16由上向下插入所述第一支架,所述凹槽18与矩形管配合,以使所述连接组件13与所述第一支架的相对位置固定。第一支架1211为矩形管,凹槽18为方形,这样插接机构16与第一支架1211可通过过盈配合实现连接组件13与第一支架的相对位置固定,由于是方形,可防止承载时造成支撑架17向下偏转,避免承载失效的情况发生;而需要拆卸时,则将插接机构16向上拔出即可,方便快捷。
43.一些实施例中,所述支撑架17包括第一连杆171、第二连杆172和第三连杆173;所述第二连杆172和第三连杆173的一端均与所述第一连杆171铰接,所述第二连杆172的另一端向背离所述第一连杆171的方向延伸,所述第三连杆173的另一端与所述第二连杆172连接;所述第一连杆171的一侧与所述插接机构16连接;当所述支撑架17折叠时,所述第三连杆173的另一端沿所述第二连杆172滑动至背离所述第一连杆171的另一端。第二连杆172和第三连杆173的一端均与第一连杆171铰接,可使得第二连杆172和第三连杆173相对于第一连杆171折叠,使得支撑架17便于收纳,可折叠储存,放置于较小的箱体内,这样便于搬运。
44.一些实施例中,为了使得支撑架17承载时,第二连杆172保持水平状态优选的方案为所述支撑架17还包括固定装置,所述固定装置与所述第三连杆173的另一端连接;当所述支撑架17承载时,所述固定装置将所述第三连杆173的另一端与所述第二连杆172的相对位置固定。
45.一些实施例中,所述第二连杆172包括顶板和两个相对且间隔设置的侧板,所述侧板的顶端与所述顶板的底面连接;所述第三连杆173的另一端与所述侧板的连接处具有连接轴19,所述侧板设有滑槽20,所述滑槽20沿所述第二连杆172的长度方向设置,所述连接轴19与所述滑槽20滑动配合;所述固定装置包括固定块21和固定销22,所述固定块21的一端与连接轴19连接,所述固定块21的另一端与所述固定销22连接,所述固定块21设于两个所述侧板之间,所述固定销22穿过所述固定块21和两个所述侧板。第三连杆173可包括两个钢板,分别设置于两个侧板的外侧,连接轴19则穿过侧板和钢板,以使第二连杆172和第三连杆173相对折叠或打开;连接轴19穿过固定块21的一端,可使得固定块21相对于连接轴19转动,固定块21上可设有通孔,当支撑架17承载,第二连杆172保持水平状态时,将固定销22穿过固定块21和两个侧板,可使得连接轴19的位置固定,防止连接轴19沿滑槽20滑动。第一连杆171也可选用具有u型槽的型材制作,当支撑架17需要折叠时,将固定销22拔出,固定块21由于重力向下,脱离顶板,连接轴19在滑槽20内向另一端滑动,第二连杆172扣合在第一连杆171的槽内,如图7所示为支撑架17折叠后的状态,可减少支撑架17的存放空间。支撑架17折叠后,第二连杆172的侧边与第一连杆171和第三连杆173的铰接轴产生干涉,因此可在第二连杆172的侧边相对应的位置上开设豁口,以避让该铰接轴的干涉。
46.一些实施例中,所述第一仿形组件14包括蒙皮23、裙板24和履带25,所述蒙皮23与所述支撑架17连接固定,所述裙板24的顶端与所述蒙皮23可拆卸连接,所述履带25与所述侧框121连接,所述履带25位于所述裙板24的内侧。履带上侧的蒙皮23通过螺栓或者旋转卡扣与支撑架17连接固定,从而使得履带上侧蒙皮23可以设置为水平状态,便于安装裙板24。
裙板通过单轴合页可拆卸地安装在履带上侧的蒙皮23上,可通过合页实现裙板24的启闭,便于检修履带以及通过裙板24进入驾驶室。
47.一些实施例中,如图10所示,无人驾驶仿形靶车还包括升降组件,所述升降组件用于将所述履带25沿所述侧框121上下升降;所述升降组件包括:连接结构件26、滑轨27和驱动机构28;所述滑轨27与所述侧框121连接,所述滑轨27的长度沿所述靶车本体11的高度方向延伸;所述连接结构件26的一侧与所述履带25连接固定,所述连接结构件26的另一侧具有滑块,所述滑块与所述滑轨27滑动连接;所述驱动机构28安装于所述侧框121上,所述驱动机构28具有推头,所述推头与所述连接结构件26具有所述滑块的一侧连接。驱动机构28可选用电动推杆或液压缸等,通过滑块与滑轨27的滑动配合,驱动机构28的推头上下伸缩时,可推动连接结构件26沿着滑轨27上下移动,以使履带25实现上下升降。履带25可通过驱动机构28实现升降,使得静态展示时,履带25可下降到一定的位置,以实现目标组件的仿真度高;待需要实现运动特性时,就可以将履带提升约100mm-200mm,大大提高整个仿形靶车的越野性能。可将驱动机构28的推头设在上方,驱动机构28的安装法兰设在下方,这样驱动机构28的推头缩回原位时,可顶住连接结构件26;当拆除驱动机构28时,连接结构件26的滑块沿滑轨27可向下移出,这样方便拆卸履带25,便于运输。一些实施例中,也可将滑轨27的顶端设置的挡块拆除,连接结构件26的滑块沿滑轨27可向上移出,这样也可拆卸履带25,便于运输。
48.一些实施例中,为了便于收纳,可折叠储存,放置于较小的箱体内,节约箱体的制作成本和存放空间,优选的方案为所述蒙皮23和所述裙板24均沿所述靶车本体11的前后方向设为可折叠。如图9所示,裙板24沿其长度方向可分割成若干个小块,各小块之间可采用合页铰接,便于拆卸后折叠收纳、便携;同理,蒙皮23也可同样制作。
49.一些实施例中,对于炮塔301、前部壳体单元151和后部壳体单元152均可采用上述折叠支架配合合页来实现快速拆装和折叠、便携,在此不做一一限定。因此,本发明实施例的仿形坦克外壳采用钢板蒙皮,满足展示和触发引信的双重强度要求,通过铰接、旋扣等固定在连接组件上,实现可快速拆卸,堆叠存放不占用空间。
50.一些实施例中,本发明实施例的技术方案打破传统的框架和蒙皮一体焊接成型的思路,将其视为几个大的单片来生产、储存和运输,装配后实现仿形的立体效果;进一步地,使用快拆卡扣、快拆卡箍、插销和可折叠支架等快速定位、安装的局部结构来实现快速拆装;更进一步地,使用合页、铰接等细微结构来实现大面积单片的折叠储存、并能快速展开装配。
51.一些实施例中,无人驾驶仿形靶车还包括地面控制设备和车载控制系统;所述车载控制系统用于对所述靶车本体11实现无人驾驶智能感知和驾驶实时控制;所述地面控制设备与所述车载控制系统电连接,所述地面控制设备包括手持终端31,所述手持终端31用于对所述靶车本体11实现遥控。
52.例如,车载控制系统可包含车载主控计算机、车载导航模块、车载避障模块、车载图像采集模块、车载通讯模块等分部件。车载控制计算机采用高性能计算平台,用于实现无人驾驶汽车智能感知和驾驶实时计算,平台配置板载千兆以太网交换模块,计算模块之间通过千兆以太网通讯互联。地面控制设备可包含显示屏、终端主控计算机、人机交互模块、无线通讯模块等部件;地面控制设备与车载控制系统通过通讯模块实现信号通讯,显示屏
用于实时显示靶车本体11的运动状态,考虑到便携和易操作性,操控终端采用手持部分和背负部分分离的设计,分为手持终端31、背负式电台箱和附件等部分。如图11所示的手持终端31,可设计为手持平板方式,通过在手持终端上进行操作,可实现对靶车本体11实现遥控。
53.应当理解的是,本发明的上述具体实施方式仅仅用于示例性说明或解释本发明的原理,而不构成对本发明的限制。因此,在不偏离本发明的精神和范围的情况下所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。此外,本发明所附权利要求旨在涵盖落入所附权利要求范围和边界、或者这种范围和边界的等同形式内的全部变化和修改例。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。