技术特征:
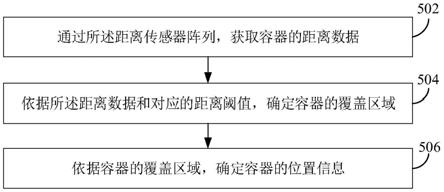
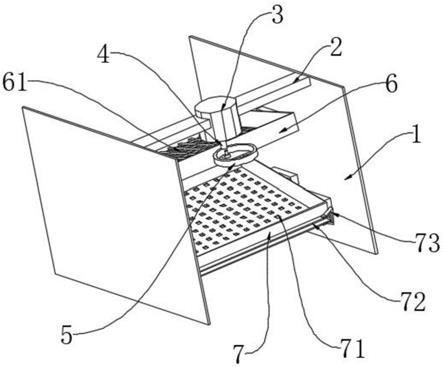
1.一种数据处理方法,其特征在于,应用于拣选设备,所述拣选设备包括车辆本体、用于放置容器的置物架,所述置物架上设置有距离传感器阵列,所述的方法包括:通过所述距离传感器阵列,获取容器的距离数据;依据所述距离数据和对应的距离阈值,确定容器的覆盖区域;依据容器的覆盖区域,确定容器的位置信息。2.根据权利要求1所述的方法,其特征在于,所述置物架包括透明的用于摆放容器的隔板,所述距离传感器阵列设置在隔板的下方且朝向隔板的上方设置。3.根据权利要求1所述的方法,其特征在于,所述置物架包括侧板和用于摆放容器的隔板,所述距离传感器阵列设置在侧板上且朝向侧板靠近容器的一侧。4.根据权利要求1所述的方法,其特征在于,所述依据所述距离数据和对应的距离阈值,确定容器的覆盖区域,包括:依据所述距离数据和对应的距离阈值,确定距离传感器阵列中的目标距离传感器;依据目标距离传感器的安装位置,确定容器的边界信息;依据所述边界信息,确定容器的覆盖区域。5.根据权利要求1所述的方法,其特征在于,还包括:依据容器的覆盖区域,确定容器的尺寸信息和容器的排布信息;依据所述尺寸信息和所述排布信息,确定容器的容器信息。6.根据权利要求1所述的方法,其特征在于,还包括:依据容器的覆盖区域,确定隔板上的容器数量。7.根据权利要求1所述的方法,其特征在于,还包括:在所述容器的覆盖区域出现变化的情况下,更新容器的位置信息。8.根据权利要求1所述的方法,其特征在于,还包括:获取物流对象在隔板上的投放位置;依据所述投放位置和容器的位置信息,确定所述物流对象投入的目标容器的目标容器信息。9.根据权利要求1所述的方法,其特征在于,所述拣选设备还包括设置置物架上的光强传感器阵列,所述依据所述距离数据和对应的距离阈值,确定容器的覆盖区域,包括:通过所述光强传感器阵列,获取光强数据;依据所述距离数据、距离阈值、光强数据、光强阈值,确定容器的覆盖区域。10.根据权利要求9所述的方法,其特征在于,所述置物架包括透明的用于摆放容器的隔板,所述光强传感器阵列设置在隔板的下方用于检测透过隔板的光的光强数据。11.根据权利要求9所述的方法,其特征在于,所述置物架包括侧板和用于摆放容器的隔板,所述光强传感器阵列设置在侧板上且朝向侧板靠近容器的一侧。12.一种数据处理方法,其特征在于,应用于拣选设备,所述拣选设备包括车辆本体、用于放置容器的置物架,所述置物架上设置有光强传感器阵列,所述的方法包括:通过所述光强传感器阵列,获取光强数据;依据所述光强数据和对应的光强阈值,确定容器的覆盖区域;依据容器的覆盖区域,确定容器的位置信息。13.根据权利要求12所述的方法,其特征在于,所述置物架包括透明的用于摆放容器的
隔板,所述光强传感器阵列设置在隔板的下方用于检测透过隔板的光的光强数据。14.根据权利要求12所述的方法,其特征在于,所述置物架包括侧板和用于摆放容器的隔板,所述光强传感器阵列设置在侧板上且朝向侧板靠近容器的一侧。15.根据权利要求12所述的方法,其特征在于,所述依据所述光强数据和对应的光强阈值,确定容器的覆盖区域,包括:依据所述光强数据和对应的光强阈值,确定光强传感器阵列中的目标光强传感器;依据目标光强传感器的安装位置,确定容器的边界信息;依据所述边界信息,确定容器的覆盖区域。16.根据权利要求12所述的方法,其特征在于,还包括:依据容器的覆盖区域,确定容器的尺寸信息和容器的排布信息;依据所述尺寸信息和所述排布信息,确定容器的容器信息。17.根据权利要求12所述的方法,其特征在于,所述拣选设备还包括设置在隔板上方的环境光传感器,所述方法还包括:通过所述环境光传感器,获取隔板上方的环境光强数据;依据所述环境光强数据,调整所述光强阈值。18.根据权利要求12所述的方法,其特征在于,还包括:依据容器的覆盖区域,确定隔板上的容器数量。19.根据权利要求12所述的方法,其特征在于,还包括:在所述容器的覆盖区域出现变化的情况下,更新容器的位置信息。20.根据权利要求12所述的方法,其特征在于,还包括:获取物流对象在隔板上的投放位置;依据所述投放位置和容器的位置信息,确定所述物流对象投入的目标容器的目标容器信息。21.一种数据处理方法,其特征在于,应用于拣选设备,所述拣选设备包括车辆本体、用于放置容器的置物架,所述置物架上设置有用于检测光的光强传感器阵列,所述的方法包括:通过所述光强传感器阵列,获取光强数据;依据所述光强数据和对应的光强阈值,确定容器的覆盖区域;依据容器的覆盖区域,确定容器的位置信息;依据容器的位置信息和物流对象在拣选设备上的投放位置,确定投放结果。22.一种数据处理方法,其特征在于,应用于拣选设备,所述拣选设备包括车辆本体、用于放置容器的置物架,所述置物架上设置有检测传感器阵列,所述的方法包括:通过所述检测传感器阵列,获取容器的边界检测数据;依据所述边界检测数据,确定容器的覆盖区域;依据容器的覆盖区域,确定容器的位置信息。23.根据权利要求22所述的方法,其特征在于,所述检测传感器阵列包括距离传感器阵列和光强传感器阵列中的至少一个。24.一种拣选设备,其特征在于,所述设备包括:车辆本体,置物架、光强传感器阵列和控制终端,所述置物架包括隔板,其中,
所述隔板,用于放置容器;所述光强传感器阵列,设置在置物架上,用于获取光强数据;所述控制终端,依据所述光强数据和对应的光强阈值,确定容器的覆盖区域;并依据容器的覆盖区域,确定容器的位置信息。25.根据权利要求24所述的拣选设备,其特征在于,还包括:环境光传感器,设置在隔板的上方,以检测隔板上方的环境光强数据;所述控制终端,依据所述环境光强数据,调整所述光强阈值。26.一种拣选设备,其特征在于,所述设备包括:车辆本体,置物架、距离传感器阵列和控制终端,所述置物架包括隔板,其中,所述隔板,用于放置容器;所述距离传感器阵列,设置在置物架上,用于获取容器的距离数据;所述控制终端,依据所述距离数据和对应的距离阈值,确定容器的覆盖区域;并依据容器的覆盖区域,确定容器的位置信息。27.一种数据处理装置,其特征在于,应用于拣选设备,所述拣选设备包括车辆本体、用于放置容器的置物架,所述置物架上设置有距离传感器阵列,所述的装置包括:距离数据获得模块,用于通过所述距离传感器阵列,获取容器的距离数据;覆盖区域获得模块,用于依据所述距离数据和对应的距离阈值,确定容器的覆盖区域;容器位置获得模块,用于依据容器的覆盖区域,确定容器的位置信息。28.一种数据处理装置,其特征在于,应用于拣选设备,所述拣选设备包括车辆本体、用于放置容器的置物架,所述置物架上设置有光强传感器阵列,所述的装置包括:光强数据获取模块,用于通过所述光强传感器阵列,获取光强数据;覆盖区域获取模块,用于依据所述光强数据和对应的光强阈值,确定容器的覆盖区域;容器位置获取模块,用于依据容器的覆盖区域,确定容器的位置信息。29.一种数据处理装置,其特征在于,应用于拣选设备,所述拣选设备包括车辆本体、用于放置容器的置物架,所述置物架上设置有光强传感器阵列,所述的装置包括:光强数据确定模块,用于通过所述光强传感器阵列,获取光强数据;覆盖区域确定模块,用于依据所述光强数据和对应的光强阈值,确定容器的覆盖区域;容器位置确定模块,用于依据容器的覆盖区域,确定容器的位置信息;投放结果确定模块,用于依据容器的位置信息和物流对象在拣选设备上的投放位置,确定投放结果。30.一种数据处理装置,其特征在于,应用于拣选设备,所述拣选设备包括车辆本体、用于放置容器的置物架,所述置物架上设置有检测传感器阵列,所述的装置包括:检测数据获得模块,用于通过所述检测传感器阵列,获取容器的边界检测数据;容器覆盖分析模块,用于依据所述边界检测数据,确定容器的覆盖区域;容器定位分析模块,依据容器的覆盖区域,确定容器的位置信息。31.一种电子设备,其特征在于,包括:处理器;和存储器,其上存储有可执行代码,当所述可执行代码被执行时,使得所述处理器执行如权利要求1-23中一个或多个所述的方法。32.一个或多个机器可读介质,其上存储有可执行代码,当所述可执行代码被执行时,
使得处理器执行如权利要求1-23中一个或多个所述的方法。
技术总结
本申请实施例提供了一种数据处理方法,应用于拣选设备,所述拣选设备包括车辆本体、用于放置容器的置物架,所述置物架上设置有距离传感器阵列,所述的方法包括:通过所述距离传感器阵列,获取容器的距离数据;依据所述距离数据和对应的距离阈值,确定容器的覆盖区域;依据容器的覆盖区域,确定容器的位置信息;能够简单方便的进行容器的定位。够简单方便的进行容器的定位。够简单方便的进行容器的定位。
技术研发人员:王辉 曾旭 柳厦 赵旭东 曹丹
受保护的技术使用者:菜鸟智能物流控股有限公司
技术研发日:2020.10.13
技术公布日:2022/4/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。