1.本实用新型涉及称重系统领域,特别涉及一种测量物体空间位置的测量装置。
背景技术:
2.在现有技术中,平台秤或其它称重设备,如汽车衡等等,其支撑点为一个及多个(两个及以上)时,在秤体在空载状态及不同载荷的加载状态下,其不同支撑点(或称支点),由于传感器本身及秤体都会产生一定程度的弹性形变,安装在秤体下面的传感器或其支撑件,会产生不同方向的倾角变化。
3.该倾角变化,对于不同的设备,在没有预设角度的情况下,是随机的。随机表现在,同一种设备,在不同的安装条件下,或者在相同安装条件下,其倾角变化的不确定性。而该不确定性,直接影响到衡器的称重结果。
4.但是目前,尚未有科学的测试或计算方法,准确测量或计算倾角与称重结果的相互关系,这就为理论计算和实际测试,造成困扰。
5.有鉴于此,本领域技术人员设计了一种测量物体空间位置的测量装置,以期克服上述技术问题。
技术实现要素:
6.本实用新型要解决的技术问题是为了克服现有技术中无法直接测量物体的空间位置的缺陷,提供一种测量物体空间位置的测量装置。
7.本实用新型是通过下述技术方案来解决上述技术问题的:
8.一种测量物体空间位置的测量装置,其特点在于,所述测量装置包括多个同位器和多个投影收集器,所述同位器安装在待测量物体的外侧部,用于将所述待测量物体内传感器或其支撑件的位置通过投影的方式变为可测量的信息;所述投影收集器安装在对应的所述同位器的侧部,用于收集所述同位器发射的投影光源的信息。
9.根据本实用新型的一个实施例,所述同位器包括投影光源单元和连接杆,所述连接杆的一端与所述待测量物体内传感器连接,另一端与所述投影光源单元连接。
10.根据本实用新型的一个实施例,所述同位器还包括三轴加速度传感器,所述三轴加速度传感器安装在所述连接杆的另一端和所述投影光源单元之间,用于获取所述同位器的空间角度变化。
11.根据本实用新型的一个实施例,所述投影光源单元包括多个水平投影光源和多个垂直投影光源。
12.根据本实用新型的一个实施例,所述三轴加速度传感器的上端设有水泡,用于调整和校准所述三轴加速度传感器。
13.根据本实用新型的一个实施例,所述投影收集器包括立杆、多个影像收集仪、信电源线和信号线,所述影像收集仪水平或垂直地固定在所述立杆上,所述信电源线将所述影像收集仪与电源连接,所述信号线将所述影像收集仪与外部的控制终端连接。
14.根据本实用新型的一个实施例,所述影像收集仪包括第一影像收集仪、第二影像收集仪和第三影像收集仪,所述第一影像收集仪水平安装在所述立杆的顶端,所述第二影像收集仪水平安装在所述立杆的底端,所述第三影像收集仪安装在所述立杆的侧部,与所述第二影像收集仪相互垂直。
15.根据本实用新型的一个实施例,所述第一影像收集仪上安装有调平水泡,用于所述第一影像收集仪的调平;
16.所述第二影像收集仪上安装有调平螺钉,用于所述第二影像收集仪的调平。
17.本实用新型的积极进步效果在于:
18.本实用新型测量物体空间位置的测量装置,通过同位器将隐藏你给的运动部件通过机械同步的方式,变成可以观察到的部件和测量的部件。同时通过投影收集器收集同位器上的投影,实现信号传输。
附图说明
19.本实用新型上述的以及其他的特征、性质和优势将通过下面结合附图和实施例的描述而变的更加明显,在附图中相同的附图标记始终表示相同的特征,其中:
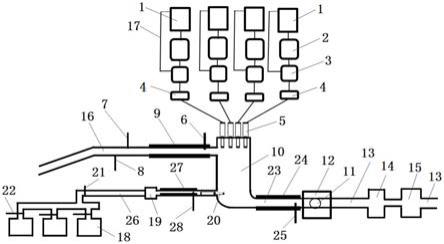
20.图1为本实用新型测量物体空间位置的测量装置的结构示意图。
21.图2为本实用新型测量物体空间位置的测量装置中同位器的结构示意图。
22.图3为本实用新型测量物体空间位置的测量装置中投影收集器的结构示意图。
23.图4为本实用新型测量物体空间位置的测量方法的角度数据收集示意图。
24.图5为本实用新型测量物体空间位置的测量方法的方向判定示意图。
25.图6为本实用新型测量物体空间位置的测量方法的传感器区域划分的示意图。
26.【附图标记】
27.同位器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
10
28.投影收集器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
20
29.待测量物体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
30
30.投影光源单元
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
11
31.连接杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
12
32.三轴加速度传感器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
13
33.水平投影光源
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
111
34.垂直投影光源
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
112
35.水平投影光源
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
211
36.垂直投影光源
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
212
37.水泡
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
131
38.立杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
21
39.影像收集仪
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
22
40.信电源线
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
23
41.信号线
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
24
42.第一影像收集仪
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
221
43.第二影像收集仪
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
222
44.第三影像收集仪
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
223
45.调平水泡
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
224
46.调平螺钉
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
225
具体实施方式
47.为让本实用新型的上述目的、特征和优点能更明显易懂,以下结合附图对本实用新型的具体实施方式作详细说明。
48.现在将详细参考附图描述本实用新型的实施例。现在将详细参考本实用新型的优选实施例,其示例在附图中示出。在任何可能的情况下,在所有附图中将使用相同的标记来表示相同或相似的部分。
49.此外,尽管本实用新型中所使用的术语是从公知公用的术语中选择的,但是本实用新型说明书中所提及的一些术语可能是申请人按他或她的判断来选择的,其详细含义在本文的描述的相关部分中说明。
50.此外,要求不仅仅通过所使用的实际术语,而是还要通过每个术语所蕴含的意义来理解本实用新型。
51.图1为本实用新型测量物体空间位置的测量装置的结构示意图。图2为本实用新型测量物体空间位置的测量装置中同位器的结构示意图。
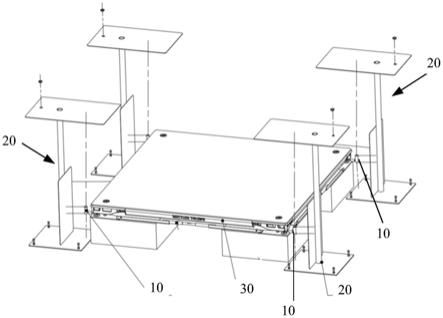
52.如图1至图3所示,本实用新型公开了一种测量物体空间位置的测量装置,其包括多个同位器10和多个投影收集器20,将同位器10安装在待测量物体30的外侧部,用于将待测量物体30内传感器或其支撑件的位置通过投影的方式变为可测量的信息。投影收集器20安装在对应的同位器10的侧部,用于收集同位器10发射的投影光源的信息。
53.优选地,同位器10包括投影光源单元11和连接杆12,将连接杆12的一端与待测量物体30内传感器连接,另一端与投影光源单元11连接。同位器10还包括三轴加速度传感器13,三轴加速度传感器13安装在连接杆12的另一端和投影光源单元11之间,用于获取同位器10的空间角度变化。
54.进一步优选地,投影光源单元11包括多个水平投影光源111和多个垂直投影光源112。例如,图6中所示投影光源单元21包括两个水平投影光源211和两个垂直投影光源212。此处对于水平投影光源211和垂直投影光源212数量仅为举例,并不作为限定。
55.另外,三轴加速度传感器13的上端还设有水泡131,用于调整和校准三轴加速度传感器13。
56.进一步地说,连接杆12连接传感器连接件,对于柱式传感器,连接杆12直接就是柱式传感器本身。
57.本实施例中的投影光源可以采用有线光源,或无线光源。同位器20的特殊之处在于:将传感器或其支撑件的位置,通过投影的方式,变成可测量的信息。同时,通过三轴加速度传感器,获得同位器的空间角度变化。投影信息和三轴加速度传感器信息,独立使用,或相互补偿都可以。
58.此处,同位器原理为:将隐藏的运动部件,通过机械同步的方式,变成可以观察到的部件和测量的部件。同位器上安装有投影装置和三轴加速度传感器。投影装置可以将运动部件的空间位置,投影到不同的投影面,投影光源首选激光投影,不排除使用其它光源。
同时,三轴加速度传感器可以直接测量运动部件在空间的即时位置,并实现信号传输。
59.图3为本实用新型测量物体空间位置的测量装置中投影收集器的结构示意图。
60.如图3所示,优选地,投影收集器20包括立杆21、多个影像收集仪22、信电源线23和信号线24,将影像收集仪22水平或垂直地固定在立杆21上,信电源线23将影像收集仪22与电源连接,信号线24将影像收集仪22与外部的控制终端连接。
61.优选地,影像收集仪22优选地包括第一影像收集仪221、第二影像收集仪222和第三影像收集仪223。其中,第一影像收集仪221水平安装在立杆21的顶端,第二影像收集仪222水平安装在立杆21的底端,第三影像收集仪223安装在立杆21的侧部,与第二影像收集仪222相互垂直。
62.进一步地,在第一影像收集仪221上安装有调平水泡224,用于第一影像收集仪221的调平。第二影像收集仪222上安装有调平螺钉225,用于第二影像收集仪222的调平。
63.投影收集器20可以收集同位器10上的投影,并实现信号传输。投影收集可以是手动收集,也可以是自动收集,自动收集时,信号实现自动传输,手动收集时,且投影信息可以人工处理。
64.本实施例中投影收集器20不限于自动收集投影,在条件不具备的情况下,可以通过描绘各个投影点在投影面的点,收集静态下的投影,并将多个静态投影数据处理成近似动态的状态。自动收集投影时,可以支撑称重设备在动态或静态下收集。
65.图4为本实用新型测量物体空间位置的测量方法的角度数据收集示意图。
66.如图4所示,本实用新型测量物体空间位置的测量装置,其采用的测量物体空间位置的测量方法包括:通过投影收集器20,例如图3中垂直方向上的两个投影收集器20,收集到对应同位器10在一预设间距h的两个平行平面内的投影点ai(i从0到n)和投影点ci(i从0到n)。同时可以测算投影点ai在另一平面的投影位置bi(i从0到n)的位置,从而根据三角函数关系,可以计算出同位器10在垂直水平面方向的倾斜角度αi(i从0到n)的大小。
67.在投影点ai点位置保持稳定不变的情况下,可以测出投影点ci在不同状态下,同位器10在水平方向上的角度变化。在投影点ci点位置保持稳定不变的情况下,可以测出投影点ai在不同状态下,同位器10在水平方向上的角度变化。
68.此处位置点的采集,可以采用人工标识投影位置,然后根据不同投影位置变化前后的空间关系,利用几何原理,计算出空间角度变化。
69.图5为本实用新型测量物体空间位置的测量方法的方向判定示意图。
70.如图5所示,所述测量方法还包括:通过yz平面内的投影,判定所述同位器和待测量物体内传感器的相关位置信息;
71.若aiy》ciy,则所述同位器偏向所述传感器的左侧,反之则偏向右侧;若bix》cix,则所述同位器偏向所述传感器的后端,反之则偏向前端。
72.根据上述描述,通过如图4和图5所示的空间角度数据收集和方向判定,可以将传感器和连接件的相互关系,按照传感器安装到时的状态,在传感器上,划分出四个区域,即如下表一所示:
73.位置前后左
ⅱⅰ
右
ⅲⅳ
74.表一
75.图6为本实用新型测量物体空间位置的测量方法的传感器区域划分的示意图。
76.如图6所示,根据上面的分析,可以统计出传感器的受力分布区域如下表二所示:
77.传感器受力区域分布
ⅰⅱⅲⅳ
垂直方向力角度αiαiαiαi传感器水平方向力的角度βiβiβiβi
78.表二
79.综上所述,本实用新型测量物体空间位置的测量装置,通过同位器将隐藏你给的运动部件通过机械同步的方式,变成可以观察到的部件和测量的部件。同时通过投影收集器收集同位器上的投影,实现信号传输。所述测量装置主要用于称重系统中传感器及其连接件的空中位置状态显示,空间位置信息收集和传递的装置。
80.虽然以上描述了本实用新型的具体实施方式,但是本领域的技术人员应当理解,这些仅是举例说明,本实用新型的保护范围是由所附权利要求书限定的。本领域的技术人员在不背离本实用新型的原理和实质的前提下,可以对这些实施方式作出多种变更或修改,但这些变更和修改均落入本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。