1.本实用新型涉及一种触控开关,特别涉及一种扫地机器人用脚轮触控开关。
背景技术:
2.随着社会的发展,扫地机器人逐渐出现在各家各户,但在扫地机器人工作的过程中有往往有需要被人为拿起的情况,正常操作是先关掉电源再拿起,这样一来比较麻烦,还有就是如果扫地机器人出现突发事件,用户忘记关掉电源直接拿起可能会造成滚刷伤人,也有小朋友因为好奇心直接将工作中的扫地机器人拿起的情况导致骚气机器人对其造成伤害。
3.因此,需要设计一种扫地机器人脚轮触控开关,在扫地机器人离开地面时,能够自动切断电源,以免对使用者产生误伤。
技术实现要素:
4.针对现有技术上存在的不足,本实用新型提出了一种扫地机器人用脚轮触控开关,本实用新型原理简单,既能起到为扫地机器人减震的作用还能通过机器人离地触发控制开关使机器人停止工作,本实用新型采用双开关的触发形式 ,其中一种开关损害时并不影响本实用新型正常工作,同时本实用新型还能实时监测自身的减震结构是否损坏。
5.为了实现上述目的,本实用新型是通过如下的技术方案来实现:
6.一种扫地机器人用脚轮触控开关,包括轮台、轮架、滚轮、连接轴、开关架,所属轮台为方台结构且轴线垂直于水平面分布,所述轮架包括弹簧、套管、l形件,所述套管至少2根连接于轮台下端面且套管轴线与轮台轴线平行分布,所述套管沿方台下端面对角分布,所述套管下端侧面设有槽孔,所述槽孔沿套管轴线对称分布,所述套管底端环部限位块,所述滚轮分布在轮台正下方且滚轮轴线与轮台下端面一中线在同一垂直面上,所述l形件一端装设在套管中另一端通过连接轴与滚轮连接,所述l形件与位于套管中的一端与套管同轴分布且该端侧表面设有与套管槽孔相对应的滑块,所述滑块位于槽孔中与槽孔滑动连接,所述l形件与位于套管中的一端且位于套管外部的侧面环布有l形件限位块,所述套管的限位块与l形件的限位块之间通过轮架弹簧连接,所述弹簧与套管同轴分布,所述开关架包括按压架和固定架,所述按压架包括按压板和支撑脚,所述支撑脚至少2个,所述支撑脚一端与连接轴上端面连接另一端与按压板下端面连接,所述支撑脚沿滚轮垂直中线、按压板下端面上与滚轮轴线垂直的中线对称分布,所述按压板上端面通过开关架弹簧与轮台下端面连接且开关架弹簧轴线与支撑脚轴线平行分布,所述固定架为l形的结构板,所述固定架一端与轮台下端面连接另一端与按压板的下端面位置相对,所述固定架上与按压板下端面相对的面上设有按压式开关且固定架上与该面垂直的面上设有光敏传感器,所述固定架装有光面传感器的面所对应的按压板的侧面设有led灯,所述按压式开关、光敏传感器与扫地机器人内部电路电性连接。
7.优选的, 所述槽孔垂直方向的长度不小于1mm且不大于10mm。
8.优选的, 所述连接轴与滚轮同轴分布且与l形件水平轴线垂直分布,所述连接轴通过轴承与滚轮连接。
9.优选的,所述轮架弹簧弹簧的长度不小于1mm且不大于10mm。
10.优选的,所述l形件与滚轮连接的一端上端面上设有倾角传感器。
11.优选的,所述led灯的位置高于光敏传感器的位置。
12.优选的,所述倾角传感器与扫地机器人的警示灯电性连接。
13.优选的,所述轮台上端面设有三维转台且三维转台与轮台同轴分布。
14.本实用新型原理简单,既能起到为扫地机器人减震的作用还能通过机器人离地触发控制开关使机器人停止工作,本实用新型采用双开关的触发形式 ,其中一种开关损害时并不影响本实用新型正常工作,同时本实用新型还能实时监测自身的减震结构是否损坏。
附图说明
15.下面结合附图和具体实施方式来详细说明本实用新型。
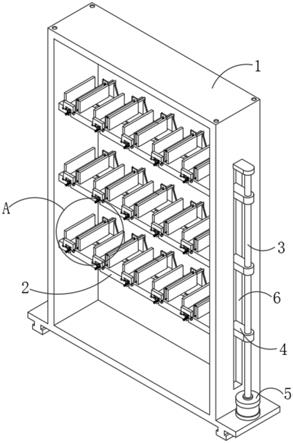
16.图1为本实用新正视图;
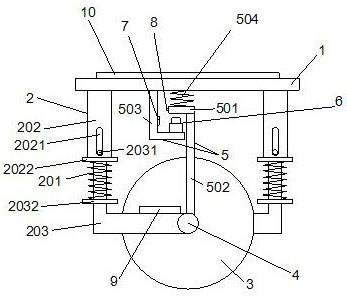
17.图2为本实用新型侧视图。
具体实施方式
18.为使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本实用新型。
19.一种扫地机器人用脚轮触控开关,包括轮台1、轮架2、滚轮3、连接轴4、开关架,所属轮台为方台结构且轴线垂直于水平面分布,所述轮架包括轮架弹簧201、套管202、l形件203,所述套管202至少2根连接于轮台1下端面且套管202轴线与轮台1轴线平行分布,所述套管202沿方台下端面对角分布,所述套管202下端侧面设有槽孔2021,所述槽孔2021沿套管202轴线对称分布,所述套管202底端环部套管限位块2022,所述滚轮3分布在轮台1正下方且滚轮3轴线与轮台1下端面一中线在同一垂直面上,所述l形件203一端装设在套管202中另一端通过连接轴4与滚轮3连接,所述l形件203与位于套管202中的一端与套管202同轴分布且该端侧表面设有与套管槽孔2021相对应的滑块2031,所述滑块2031位于槽孔2021中与槽孔2021滑动连接,所述l形件203与位于套管202中的一端且位于套管202外部的侧面环布有l形件限位块2032,所述套管限位块2022与l形件限位块2032之间通过轮架弹簧201连接,所述轮架弹簧201与套管202同轴分布,所述开关架5包括按压板501、支撑脚502和固定架503,所述支撑脚502至少2个,所述支撑脚502一端与连接轴4上端面连接另一端与按压板501下端面连接,所述支撑脚502沿滚轮3垂直中线、按压板501下端面上与滚轮3轴线垂直的中线对称分布,所述按压板501上端面通过开关架弹簧504与轮台1下端面连接且开关架弹簧504轴线与支撑脚502轴线平行分布,所述固定架503为l形的结构板,所述固定架503一端与轮台1下端面连接另一端与按压板501的下端面位置相对,所述固定架503上与按压板501下端面相对的面上设有按压式开关6且固定架503上与该面垂直的面上设有光敏传感器7,所述固定架503装有光面传感器7的面所对应的按压板501的侧面设有led灯8,所述按压式开关6、光敏传感器7与扫地机器人内部电路电性连接。
20.上述实例中,所述槽孔2021垂直方向的长度不小于1mm且不大于10mm。
21.上述实例中,所述连接轴4与滚轮3同轴分布且与l形件203水平轴线垂直分布,所述连接轴4通过轴承与滚轮3连接。
22.上述实例中,所述轮架弹簧201的长度不小于1mm且不大于10mm。
23.上述实例中,所述l形件203与滚轮3连接的一端上端面上设有倾角传感器9。
24.上述实例中,所述倾角传感器9与扫地机器人的警示灯电性连接。
25.上述实例中,所述led灯8的位置高于光敏传感器7的位置。
26.上述实例中,所述轮台1上端面设有三维转台且三维转台10与轮台同轴分布。
27.为了方便理解本实用新型的上述方案,以下就本实用新型在实际过程中的工作原理或操作方式进行详细说明:
28.当用户将正在工作中的扫地机器人拿起时,在轮架弹簧201和开关架弹簧504的作用下使按压板501下压触发按压式开关6的同时led灯随按压板501向下位移到与光敏传感器7相对应的位置触发光敏传感器7,光敏传感器和按压式开关8同时切断扫地机器人工作电源时使扫地机器人停止工作;光敏传感7器、压式开关8都可单独切断扫地机器人的工作电源;扫地机器人工作时轮架弹簧201和固定架弹簧504可起到减震作用,在扫地机器人工作中倾角传感器触发扫地机器人报警灯时,用户可检查轮架2是否需要检修,倾角传感器9起到了实时自检的作用。
29.本实用新型原理简单,既能起到为扫地机器人减震的作用还能通过机器人离地触发控制开关使机器人停止工作,本实用新型采用双开关的触发形式 ,其中一种开关损害时并不影响本实用新型正常工作,同时本实用新型还能实时监测自身的减震结构是否损坏。
30.本行业的技术人员应该了解,本实用新型不受上述实施例的限制。上述实施例和说明书中描述的只是说明本实用新型的原理。在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进。这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。