技术特征:
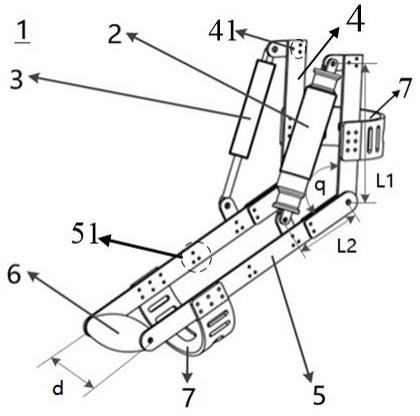
1.一种气动式单臂上肢外骨骼机器人,其特征在于,包括肘关节外骨骼机械臂,用于容纳穿戴者的上臂和前臂;所述肘关节外骨骼机械臂包括第一人工气动肌肉和压缩型气弹簧;所述第一人工气动肌肉和所述压缩型气弹簧用于对所述肘关节外骨骼机械臂提供驱动力矩。2.根据权利要求1所述的机器人,其特征在于,所述肘关节外骨骼机械臂包括依次连接的上臂连杆、前臂连杆和手柄;所述肘关节外骨骼机械臂包括相对设置的第一侧和第二侧;在所述第一侧,所述第一人工气动肌肉的两端分别与所述上臂连杆和所述前臂连杆连接;在所述第二侧,所述压缩型气弹簧的两端分别与所述上臂连杆和所述前臂连杆连接。3.根据权利要求2所述的机器人,其特征在于,所述第一人工气动肌肉包括内部橡胶管、两个管状接头、气动接头、金属卡箍和外部编织网;两个所述管状接头分别与所述内部橡胶管的两端连接;所述上臂连杆和所述前臂连杆分别通过所述管状接头与所述第一人工气动肌肉连接;所述气动接头与所述内部橡胶管的一端连接,所述第一人工气动肌肉通过所述气动接头充气和放气;所述金属卡箍设置在所述内部橡胶管的两端,用于固定包覆在所述内部橡胶管外部的所述外部编织网。4.根据权利要求1所述的机器人,其特征在于,还包括护肩结构,所述护肩结构包裹在所述穿戴者的肩部和大臂,并固定于所述穿戴者的上肢;所述护肩结构与所述肘关节外骨骼机械臂连接。5.根据权利要求4所述的机器人,其特征在于,还包括外展肩枕,所述外展肩枕设置在所述穿戴者的腋下;所述外展肩枕包括第二人工气动肌肉和柔软针织软袋,所述第二人工气动肌肉放置在所述针织软袋中;所述外展肩枕与所述护肩结构连接。6.根据权利要求5所述的机器人,其特征在于,所述护肩结构包括底层护肩和顶层肩带,所述底层护肩用于包裹所述穿戴者的肩部和大臂;所述底层护肩的两侧设置有连接卡环,所述连接卡环用于与所述肘关节外骨骼机械臂连接;所述顶层肩带为弹性绷带,所述顶层肩带的两端分别与所述外展肩枕连接。7.一种针对权利要求1-6任一项所述的机器人的控制系统,其特征在于,包括能源装置、上位机、下位机、传感装置和驱动装置;所述能源装置包括空压机和直流电源;所述传感装置包括惯性传感器、接触力传感器;所述驱动装置包括稳压阀、驱动电路板和高速开关阀;所述驱动装置用于驱动所述第一人工气动肌肉和所述压缩型气弹簧对所述肘关节外骨骼机械臂提供驱动力矩。8.根据权利要求7所述的控制系统,其特征在于,还包括关节力矩测量装置,用于测量所述第一人工气动肌肉和所述压缩型气弹簧对所述肘关节外骨骼机械臂提供的驱动合力;
所述关节力矩测量装置包括电子测力计、连接环、钢丝绳、拉伸弹簧和定滑轮;所述肘关节外骨骼机械臂包括依次连接的上臂连杆和前臂连杆;所述电子测力计和所述定滑轮固定设置在所述上臂连杆的外侧,所述电子测力计与所述连接环的一端连接;所述连接环的另一端通过所述钢丝绳与所述拉伸弹簧的一端固定连接,所述拉伸弹簧的另一端与所述前臂连杆的外侧固定连接;所述钢丝绳设置在所述定滑轮上,所述定滑轮用于约束所述拉伸弹簧的移动方向。9.根据权利要求8所述的控制系统,其特征在于,还包括几何模型处理器和线性控制器,所述几何模型处理器用于将所述驱动合力进行几何关系模型计算后得到实际驱动力矩;所述线性控制器用于将所述实际驱动力矩调整为期望驱动力矩。10.根据权利要求9所述的控制系统,其特征在于,所述几何模型处理器计算后得到的所述实际驱动力矩满足如下关系式:其中,系数f0为所述电子测力计的初始值,f为所述电子测力计的当前值,为所述上臂连杆和所述前臂连杆之间的夹角,l1为所述上臂连杆与所述前臂连杆连接处与所述拉伸弹簧与所述前臂连杆的连接处之间的距离,l2为所述上臂连杆与所述前臂连杆连接处与所述拉伸弹簧与所述连接环的连接处的距离。
技术总结
本申请公开了一种气动式单臂上肢外骨骼机器人及控制系统,该机器人包括肘关节外骨骼机械臂,用于容纳穿戴者的上臂和前臂;所述肘关节外骨骼机械臂包括第一人工气动肌肉和压缩型气弹簧;所述第一人工气动肌肉和所述压缩型气弹簧用于对所述肘关节外骨骼机械臂提供驱动力矩。本申请实施例提供的气动式单臂上肢外骨骼机器人具有一定的“容错”能力,即当肘关节外骨骼机械臂处于工作状态时,人工气动肌肉如果出现漏气等突发故障,穿戴者仍可依靠压缩型气弹簧的作用使手臂恢复至初始位置,避免发生运动损伤。生运动损伤。生运动损伤。
技术研发人员:李醒 赵智睿 郝丽娜 马宏伟 孙悦超
受保护的技术使用者:东莞理工学院
技术研发日:2022.03.25
技术公布日:2022/4/26
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。