1.本发明涉及一种考核智能系统,具体涉及一种单兵战术训练与考核智能系统及方法。
背景技术:
2.单兵战术是士兵在战斗中的基本动作,现有的单兵训练通常是依靠指挥人员采用秒表记录测试人员动作的完成时间,并且观测动作规范程度,进行考核成绩评定;此外,训练数据采集存储是军事训练组织实施中的重要环节,由于单兵战术训练数据通常采用人工方式进行采集记录,因此其采集存储效率低下,且错误率较高,不利于后期对数据进行综合分析对比;传统单兵战术训练与考核智能系统采用铁丝网模拟实战环境,以受训者是否触碰铁丝网作为判定依据,与实战环境存在较大差异。
3.综上所述,现有的单兵训练考核人工记录方式存在以下不足:
4.1、记录考核方式人为因素影响大,考核结果不准确,效率低下;
5.2、缺乏规范化、自动化以及智能化的客观记录考核智能系统与考核方法。
技术实现要素:
6.本发明目的是解决现有单兵战术训练考核过程中,传统人工记录考核方式导致考核结果不准确、效率低下,传统铁丝网与实战环境存在较大差异以及考核模式缺乏规范化、自动化、智能化的考核系统与考核方法的技术问题,而提供一种单兵战术训练与考核智能系统及方法。
7.本发明的技术方案:
8.一种单兵战术训练与考核智能系统,包括视频图像处理单元,终端,后台管理中心,还包括依次设置的匍匐单元、障碍物单元和冲刺单元;
9.其特殊之处在于:
10.所述终端包括至少一个手持终端;
11.所述匍匐单元包括运动姿态监视模块、采集控制模块和依次排列的1至4 个低架体匍匐模块以及1至4个高架体匍匐模块;
12.运动姿态监视模块包括多个计时传感器组和多个犯规检测传感器组;多个计时传感器组和多个犯规检测传感器组分别设置在相应匍匐模块的架体上,多个计时传感器组用于记录学员进网出网时间,多个犯规检测传感器组用于记录学员违规触网次数;
13.所述采集控制模块用于采集多个计时传感器组和多个犯规检测传感器组的检测信号并发送至手持终端;
14.所述视频图像处理单元包括人脸识别模块、头部姿态评分模块、肢体动作评分模块、视频监控单元以及数据采集分析中心中的一种或多种;所述人脸识别模块、视频监控单元、头部姿态评分模块和肢体动作评分模块采集到的数据均传输至数据采集分析中心;
15.所述数据采集分析中心用于控制人脸识别模块、头部姿态评分模块和肢体动作评
53主干网络的中间层和倒数第二层的上采样进行拼接,形成新的优化网络,用于不断迭代新的样本训练学习,得到头部模型;
35.1.3)通过损失函数优化训练头部模型;所述损失函数为目标定位偏移量损失、目标置信度损失以及目标分类损失中的一种或多种;
36.1.4)采集待考核学员头部图像信息,输送至头部模型,识别学员头部图像;
37.2)计算头部方位角
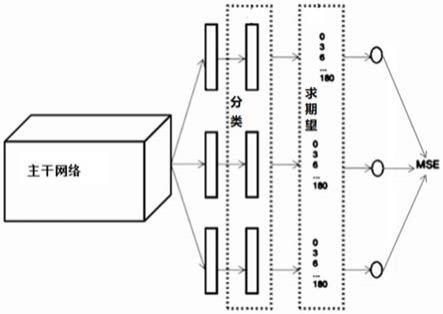
38.2.1)构建第二主干网络模型,所述第二主干网络模型为resnet50主干网络;所述resnet50主干网络包括三个全连接层,所述三个全连接层分别对应头部方位角的偏航角、滚转角和俯仰角;所述resnet50主干网络的映射区间范围为 [-99, 99];每个全连接层在所述映射区间范围内单独做预测,且单独做预测的全连接数均为二进制数;
[0039]
2.2)对构建的resnet50主干网络进行训练,得到训练后的resnet50主干网络,并获取实际标注数据;
[0040]
2.3)将1.4)中识别的学员头部图像,输送至步骤2.2)训练后的resnet50 主干网络进行头部方位角计算;
[0041]
2.3.1)将学员头部图像中头部方位角的偏航角、滚转角或俯仰角分别映射到[-99, 99]区间内,并分别将映射区间范围中-99到 99共199个数值依次进行分类,三个为一组,中间间隔作为离散类别;
[0042]
2.3.2)将步骤2.3.1)得到的离散类别通过softmax函数操作后归一化为概率值,全连接层中所有离散类别数据的概率值相加为1;
[0043]
2.3.3)将步骤2.3.2)得到的概率值和对应的离散类别相乘并求和,得到期望值;通过期望值和实际标注数据的角度计算均方差,最终通过端到端训练输出头部方位角;
[0044]
3)判断当前时刻头部方位角的偏航角、滚转角或俯仰角是否落入相应的设定范围内;若否,则按照扣分规则进行相应的扣分操作,并给出得分;若是,则直接给出得分。
[0045]
进一步地,所述肢体动作评分模块通过以下步骤实现肢体动作评分;
[0046]
1)实时采集学员人体姿态图像并识别出目标图像;
[0047]
1.1)组建第一主干网络模型;
[0048]
1.2)从步骤1.1)组建好的第一主干网络模型中提取8、16、32倍下采样的特征;
[0049]
1.3)将步骤1.2)中提取8、16、32倍下采样的特征输入到特征金字塔网络做多尺度的特征融合;
[0050]
1.4)将步骤1.3)融合结果输出到检测头中检测识别出目标图像;
[0051]
2)对人体姿态进行评估;
[0052]
2.1)构建轻量级网络;所述轻量级网络由六层卷积组成:
[0053]
第一层,conv/relu层,核心大小为3
×
3、步长为2、通道为32;
[0054]
第二层,conv/relu层,核心大小为3
×
3、步长为1、通道为64;
[0055]
第三层,conv/relu层,核心大小为3
×
3、步长为2、通道为64;
[0056]
第四层,conv/relu层,核心大小为3
×
3、步长为1、通道为64;
[0057]
第五层,transconv/bn/relu层,核心大小为2
×
2、步长为2、通道为64;
[0058]
第六层,transconv/bn/relu层,核心大小为2
×
2、步长为2、通道为32;
[0059]
2.2)通过快速姿态蒸馏模型训练方法,将潜在的姿态从一个预先训练好的教师模
型转移到构建好的轻量级网络中,形成学生模型;所述快速姿态蒸馏模型训练方法是通过人体关键骨节点热度图进行判别;
[0060]
2.3)通过跨步卷积对步骤1.4)检测识别出的目标图像做两次下采样;
[0061]
2.4)利用教师模型中所学的潜在的姿态来训练学生模型,并将步骤2.3)两次下采样得到的目标图像输送至学生模型中,得到目标图像的置信度;接着将目标图像的置信度与预先设置的置信度标准值进行比较,大于置信度标准值则输出人体关键骨节点热度图的图像显示,随后进入评分系统并输出得分;小于置信度标准值则进行相应的扣分操作,随后进入评分系统并输出得分。
[0062]
进一步地,所述低架体匍匐模块与高架体匍匐模块的架体结构一致;
[0063]
所述低架体匍匐模块包括加强筋组件以及分设在左右两侧的支腿、连接梁和水平连接座;
[0064]
所述支腿包括前腿、中腿和后腿;所述连接梁包括前梁和后梁;所述水平连接座包括前座、中座和后座;其中,前腿顶端与前座前端固连,中腿顶端与中座中部固连,后腿顶端与后座后端固连;前座后端与前梁前端之间、前梁后端与中座前端之间、中座后端与后梁前端之间以及后梁后端与后座前端之间分别通过连接梁铰接轴铰接并通过定位销固定;
[0065]
所述加强筋组件包括分别设置在左右两侧的两个前座之间、两个中座之间以及两个后座之间的三组连接杆;每组连接杆包括铰接的左杆和右杆、套设在左杆两端的左套筒和中套筒、套设在右杆右端的右套筒;左杆的左端与左侧的水平连接座铰接;右杆的右端与右侧的水平连接座铰接;所述左套筒用于固定左杆与左侧水平连接座的铰接处;所述中套筒用于固定左杆和右杆的铰接处;所述右套筒用于固定右杆与右侧水平连接座的铰接处;其中,两个前座之间连接杆的三个铰接轴均与前座平行;两个中座之间连接杆的三个连接梁铰接轴均与中座平行;两个后座之间连接杆的三个连接梁铰接轴均与后座平行。
[0066]
所述计时传感器组的数量为三个;所述三个计时传感器组分别设置在最前端的两个支腿、变姿处的两个支腿及最后端的两个支腿内侧面,用于训练者入网、变姿和出网的计时;所述多个犯规检测传感器组分别设置在每个低架体匍匐模块和高架体匍匐模块的左右两侧连接梁内侧面上,用于犯规动作检测;所述模组相机分别设置在不同位置的一组连接杆中部,用于采集训练者的头部图像;
[0067]
所述采集控制模块包括至少一个采集控制盒以及设置在每个低架体匍匐模块和高架体匍匐模块的连接梁外侧面上的支架航插口;所述采集控制盒通过电缆与支架航插口电连接;所述支架航插口通过电缆与计时传感器组以及犯规检测传感器组电连接。
[0068]
进一步地,所述冲刺单元包括两个冲刺杆、采集控制盒以及至少一个光电传感器;
[0069]
每个冲刺杆上设置有一个冲刺杆航插口或者其中一个冲刺杆上设置有两个冲刺杆航插口;
[0070]
所述光电传感器设置在冲刺杆上,用于检测学员通过终点线的信号;
[0071]
所述采集控制盒通过电缆与冲刺杆航插口电连接;
[0072]
所述冲刺杆航插口通过电缆与光电传感器电连接。
[0073]
进一步地,所述将人体动作与标准动作进行比较是通过计算人体动作与标准动作之间的欧式距离实现的;
[0074]
所述计时传感器组、犯规检测传感器组均为激光对射型光电开关对;
[0075]
所述两个冲刺杆为两根空心冲刺杆,空心冲刺杆高于两米;所述两根空心冲刺杆上端通过一个空心固定平衡杆连接;
[0076]
所述光电传感器为激光对射型光电开关对,且激光对射型光电开关的接收端和发射端分别安装在两根空心冲刺杆上,并相向对准;
[0077]
所述匍匐单元还包括设置在采集控制盒内的蜂鸣器;
[0078]
所述手持终端包括战斗运动手持终端和地形地物手持终端;
[0079]
所述第一和采集控制盒内均设置有单片机,所有激光对射型光电开关对信号均接入单片机的gpio口,然后通过无线方式将数据发送至便携式手持终端。
[0080]
一种单兵战术训练与考核方法,基于前面所述的考核智能系统,其特殊之处在于,包括以下步骤:
[0081]
1)人脸识别
[0082]
1.1)通过人脸信息采集摄像机采集学员面部信息并传输至数据采集分析中心;
[0083]
1.2)数据采集分析中心通过人脸检测、人脸对齐、特征提取、特征匹配过程将前期采集到的学员面部信息进行结构化存储,并将存储数据上传至后台管理中心;
[0084]
1.3)自动识别匹配学员信息,匹配成功即进入匍匐单元考核;
[0085]
2)匍匐单元考核
[0086]
2.1)匍匐单元中的采集控制盒进入上电初始化、自检模式;
[0087]
2.2)将采集控制盒与战斗运动手持终端通过无线连接,连接异常则引发蜂鸣器报警,并返回到上电初始化、自检模式;连接正常则进行激光对射型光电开关对的红外线对齐检测,检测异常则将状态发送至战斗运动手持终端,并返回到上电初始化、自检模式;检测正常则进入考试模式;
[0088]
2.3)后台管理中心将步骤1.3)匹配成功的待考核学员信息通过无线网络发送至战斗运动手持终端,进入待考状态;同时开启低/高姿匍匐监控摄像机,用于获取低姿入网到高姿出网期间学员匍匐姿态原始图像视频;
[0089]
2.4)进入匍匐单元考核模式,考核学员进网时触发第一个计时传感器组,与其连接的采集控制盒开始计时,同时模组相机开始拍摄;采集控制盒将考试信号上传至战斗运动手持终端;考核学员前进至变姿处,触发第二个计时传感器组,采集控制盒记录变姿时间,并将记录的时间上传至战斗运动手持终端;考核学员出网时触发第三个计时传感器组,采集控制盒记录出网时间,并将记录的时间传输至战斗运动手持终端;考核学员在匍匐前进过程中一旦触碰到上方犯规检测传感器组的激光束,即产生犯规行为,采集控制盒上相应的指示灯点亮,并发出蜂鸣警报提醒训练者调整姿态,同时将犯规信息传输至战斗运动手持终端;
[0090]
2.5)考核学员出网后,匍匐单元考核结束,战斗运动手持终端将考核成绩发送至后台管理中心;模组相机拍摄得到的图像传输至数据采集分析中心进行分析处理,随后将数据采集分析中心处理后的数据信息传输至后台管理中心;低/高姿匍匐监控摄像机获取的原始图像视频发送至数据采集分析中心,经分析处理后传输至后台管理中心;
[0091]
3)障碍物单元考核
[0092]
3.1)进入障碍物单元考核,开启障碍物监控摄像机用于获取学员利用地形地物的战术动作的原始图像视频;
[0093]
3.2)障碍物单元考核结束,将障碍物监控摄像机获取的原始图像视频传输至数据采集分析中心,经分析处理后传输至后台管理中心;
[0094]
4)冲刺单元考核
[0095]
4.1)冲刺单元中的采集控制盒进入上电初始化、自检模式;
[0096]
4.2)将采集控制盒与地形地物手持终端通过无线连接,连接异常则引发蜂鸣器报警,并返回到上电初始化、自检模式;连接正常则进行光电传感器的红外线对齐检测,检测异常则将状态发送至地形地物手持终端,并返回到上电初始化、自检模式;检测正常则进入待考状态;
[0097]
4.3)后台管理中心将步骤1.3)匹配成功的待考核学员信息通过无线网络发送至地形地物手持终端,进入待考状态;同时开启冲刺监控摄像机,用于获取考核学员在冲刺区域的战术动作原始图像视频;
[0098]
4.4)进入冲刺单元考核模式
[0099]
考核学员达到终点,红外激光束被遮挡,采集控制盒即自动记录当前结束时间,并对记录的当前结束时间进行分析判断处理,若成绩不合格,则蜂鸣报警;同时将记录的时间信息以及报警信息通过无线传输至地形地物手持终端;
[0100]
4.5)地形地物手持终端将考核成绩发送至后台管理中心,同时将冲刺监控摄像机获取的原始图像视频传输至数据采集分析中心,经分析处理后传输至后台管理中心;
[0101]
5)后台管理中心对考核学员的匍匐单元考核结果、障碍物单元考核结果以及冲刺单元考核结果进行分析统计,并将最终考核成绩发送至现场实时显示终端。
[0102]
进一步地,所述步骤2)还包括步骤2.6);
[0103]
2.6)低/高姿匍匐监控摄像机获取的原始图像视频发送至数据采集分析中心,数据采集分析中心对原始图像视频片段进行标记,被标记的原始图像视频片段传输至nvr进行记录存储;同时数据采集分析中心将标记的时间戳传送至后台管理中心,后台管理中心通过标记的时间戳可对原始图像视频片段访问查找;
[0104]
所述步骤3)还包括步骤3.3);
[0105]
3.3)将障碍物监控摄像机获取的原始图像视频传输至数据采集分析中心,数据采集分析中心对原始图像视频片段进行标记,被标记的原始图像视频片段传输至nvr进行记录存储;同时数据采集分析中心将标记的时间戳传送至后台管理中心,后台管理中心通过标记的时间戳可对原始图像视频片段访问查找;
[0106]
所述步骤4)还包括步骤4.6);
[0107]
4.6)将冲刺监控摄像机获取的原始图像视频传输至数据采集分析中心,数据采集分析中心对原始图像视频片段进行标记,被标记的原始图像视频片段传输至nvr进行记录存储;同时数据采集分析中心将标记的时间戳传送至后台管理中心,后台管理中心通过标记的时间戳可对原始图像视频片段访问查找。
[0108]
本发明的有益效果:
[0109]
1、本发明采用现代的光电技术、视频ai处理、海量数据的存储分析、信号处理技术、软件技术、物联网和大数据技术,提高了训练考核的自主性与科学性、规范性、精准性,节约了人力和提高考核效率,更好地保障参训者的生命安全等。
[0110]
2、本发明训练考核实现电子化,从开始、过程、结束,整个训练考核过程的检测均
采用光电技术、无线通信技术,数据处理自动化,保证数据的及时、准确无误。
[0111]
3、本发明训练考核具有自主化优点,在智能化的训练管理系统支持下,参训者可以自主地提出申请并完成训练、成绩自动记录、传输;保证训练及考核的公正性。
[0112]
4、本发明训练考核过程及时监测、报警,有效避免参训人员损伤,对于潜在的训练健康安全隐患进行提前预警;参训者可开展有针对性的强化训练,防止意外发生,有效保障生命安全。
[0113]
5、本发明通过ai智能算法判别单兵动作是否犯规,实现客观量化以及规范的评判标准,使结果准确、公正且工作效率大大提升。
[0114]
6、本发明的高低匍匐支架可折叠,方便安装拆卸及搬运。
[0115]
7、本发明的后台管理软件可实现数据存储、显示与分析,操作简单,效率高。
附图说明
[0116]
图1是本发明考核智能系统的连接关系图(视频监控单元,包括视频监控a 为低/高姿匍匐监控摄像机;视频监控b为障碍物监控摄像机;视频监控c为冲刺监控摄像机);
[0117]
图2是本发明实施例中匍匐单元的结构示意图;
[0118]
图3是本发明实施例中匍匐单元的低架体匍匐模块的结构示意图;
[0119]
图4是图3的局部放大图;
[0120]
图5是本发明实施例中冲刺单元结构示意图;
[0121]
图6是本发明实施例中视频监控单元、视频图像处理单元和后台管理中心的连接关系图(视频监控单元,包括视频监控a为低/高姿匍匐监控摄像机;视频监控b为障碍物监控摄像机;视频监控c为冲刺监控摄像机);
[0122]
图7是本发明实施例中数据采集分析中心与处理分析对象的连接关系图;
[0123]
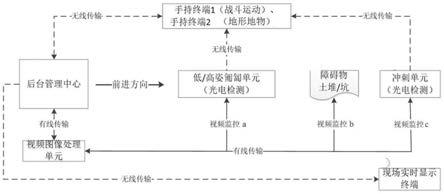
图8是本发明实施例中匍匐单元、冲刺单元与后台管理中心的连接关系图;
[0124]
图9是本发明实施例中匍匐单元的采集控制盒内软件设计流程图;
[0125]
图10是本发明实施例中冲刺单元的采集控制盒内软件设计流程图;
[0126]
图11是本发明实施例中手持终端功能框图;
[0127]
图12是本发明实施例中手持终端软件设计流程图;
[0128]
图13是本发明实施例中后台管理软件功能框图;
[0129]
图14是本发明实施例中后台管理软件流程图;
[0130]
图15是本发明实施例中匍匐单元的低架体匍匐模块的完全折叠结构示意图;
[0131]
图16是本发明中resnet50主干网络的网络结构示意图,图中mse为均方差;
[0132]
图17是本发明中mbconv1流程图;
[0133]
图18是本发明中mbconv6流程图;
[0134]
图19是本发明中人体姿态评估流程图。
[0135]
附图标记说明:
[0136]
1-低架体匍匐模块,101-前腿,102-中腿,103-后腿,104-前梁,105-后梁, 106-前座,107-中座,108-后座,109-左杆,110-右杆,111-左套筒,112-中套筒, 113-右套筒,114-高度调节座,115-连接梁铰接轴,116-定位销;3-高架体匍匐模块;2-采集控制盒,201-模组相机,202-计时传感器组,203-犯规检测传感器组,204-支架航插口;22-冲刺杆,23-光电传
感器,24-冲刺杆航插口,25-空心固定平衡杆,26-矩形套管。
具体实施方式
[0137]
本发明一种单兵战术训练与考核智能系统,如图1所示,包括视频图像处理单元、终端、后台管理中心、nvr,还包括依次设置的匍匐单元、障碍物单元和冲刺单元;终端包括两个手持终端和一个现场实时显示终端。两个手持终端分别为战斗运动手持终端和地形地物手持终端,战斗运动手持终端用于匍匐单元,地形地物手持终端用于冲刺单元。
[0138]
如图2所示,匍匐单元包括运动姿态监视模块、采集控制模块和从低到高依次排列的4个低架体匍匐模块1以及4个高架体匍匐模块3。
[0139]
低架体匍匐模块1和高架体匍匐模块3的架体结构一致,区别在于支腿的高度不一样,本实施例仅通过低架体匍匐模块1的结构进行详细的描述。具体的如图3和图4所示,低架体匍匐模块1包括加强筋组件以及分设在加强筋组件左右两侧的支腿、连接梁和水平连接座。高架体匍匐模块3尺寸为:长
×
宽
×
高=2500mm
×
1800mm
×
600mm,低架体匍匐模块1尺寸为:长
×
宽
×
高
[0140]
=2500mm
×
1800mm
×
400mm。
[0141]
支腿包括前腿101、中腿102和后腿103;连接梁包括前梁104和后梁105;水平连接座包括前座106、中座107和后座108。其中,前腿101顶端与前座106 前端固连,中腿102顶端与中座107中部固连,后腿103顶端与后座108后端固连;前座106后端与前梁104前端之间、前梁104后端与中座107前端之间、中座107后端与后梁105前端之间以及后梁105后端与后座108前端之间分别通过连接梁铰接轴115铰接,并通过定位销116固定。中腿102与前腿101的长度之和小于前梁104的长度,中腿102与后腿103的长度之和小于后梁105 的长度。前腿101、中腿102和后腿103底部均设置有高度调节座114。
[0142]
加强筋组件包括分别设置在左右两侧的两个前座106之间、两个中座107 之间以及两个后座108之间的三组连接杆,每组连接杆包括铰接的左杆109和右杆110、套设在左杆109两端的左套筒111和中套筒112、套设在右杆110右端的右套筒113,左杆109的左端与左侧的水平连接座铰接,右杆110的右端与右侧的水平连接座铰接,左套筒111用于固定左杆109与左侧水平连接座的铰接处,中套筒112用于固定左杆109和右杆110的铰接处,右套筒113用于固定右杆110与右侧水平连接座的铰接处。其中,两个前座106之间连接杆的三个铰接轴均与前座106平行,两个中座107之间连接杆的三个铰接轴均与中座107 平行,两个后座108之间连接杆的三个铰接轴均与后座108平行。左杆109的长度小于前梁104的长度,同时小于后梁105的长度;右杆110的长度小于前梁104的长度,同时小于后梁105的长度。低/高架体匍匐模块均可折叠,完全折叠后的低架体匍匐模块如图15所示。
[0143]
运动姿态监视单元包括四个模组相机201、三个计时传感器组202、多个犯规检测传感器组203。模组相机201分别设置在第二、第四个低架体匍匐模块1 的后端连接杆中部,以及第二、第四个高架体匍匐模块3的后端连接杆中部,用于拍摄训练者在网内各阶段的运动姿态,特别是训练者的头部图像,以供敌情观念的判罚。模组相机201通过蝶形螺钉进行固定,拆卸安装方便。三个计时传感器组202分别设置在最前端的两个支腿、变姿处的两个支腿及最后端的两个支腿内侧面上,用于训练者入网、变姿和出网的计时。多个犯规检测传感器组203均匀设置在每个低架体匍匐模块1和高架体匍匐模块3的左右两侧连接梁内侧面
上,用于犯规动作检测。计时传感器组202、犯规检测传感器组203 及模组相机触发传感器组均为激光对射型光电开关。
[0144]
采集控制模块包括至少一个采集控制盒2以及设置在每个低架体匍匐模块1 和高架体匍匐模块3的连接梁外侧面上的支架航插口204;采集控制盒2通过电缆与支架航插口204电连接;支架航插口204通过电缆与计时传感器组202以及犯规检测传感器组203电连接。采集控制盒2内设置有单片机,所有激光对射型光电开关对信号均接入单片机的gpio口,然后通过无线方式将数据发送至战斗运动手持终端。采集控制盒2内设置有蜂鸣器,匍匐前进训练中学员违规动作时会伴有蜂鸣器报警提示,以便学员及时调整训练姿态。匍匐单元的采集控制盒内软件设计流程如图9所示,
[0145]
冲刺单元用于检测考核学员是否达到终点以及记录冲刺时间。如图5所示,冲刺单元包括两个冲刺杆22、采集控制盒2、地形地物手持终端以及两个光电传感器23;本实施例中光电传感器23为激光对射型光电开关。两个冲刺杆22 为两根空心冲刺杆,空心冲刺杆高于两米;所述两根空心冲刺杆上端通过一个空心固定平衡杆25连接;空心冲刺杆上端与空心固定平衡杆25通过矩形套管 26连接。两对激光对射型光电开关对沿空心冲刺杆自上而下分布;激光对射型光电开关对由接收端和发射端组成,接收端和发射端分别安装在两根空心冲刺杆上,并相向对准;激光对射型光电开关的接收端均在一根空心冲刺杆上,发射端均在另一根空心冲刺杆上。其中一个空心冲刺杆上设置有两个冲刺杆航插口24,其它实施例也可以每个空心冲刺杆上设置有一个冲刺杆航插口24;采集控制盒2通过电缆与冲刺杆航插口24电连接;冲刺杆航插口24通过电缆与激光对射型光电开关对电连接。采集控制盒2内设置有单片机,所有激光对射型光电开关对信号均接入单片机的gpio口,然后通过无线方式将数据发送至地形地物手持终端。采集控制盒2内设置有蜂鸣器,学员冲刺时间不及格即发出蜂鸣警告。冲刺单元的采集控制盒2内软件设计流程如图10所示。
[0146]
战斗运动手持终端和地形地物手持终端,该两个手持终端分别通过无线方式与后台管理中心关联,可上传、下载考核信息,查询成绩排名等。手持终端包括壳体,设置在壳体内的mcu模块、无线通讯模块、蜂鸣器和充电电池,设置在壳体正面的lcd触摸屏,设置在壳体下方底面的电容笔单元、电源开关和充电口,设置在壳体上方顶面的手提带和天线,设置在壳体背面的手带单元,设置在壳体左侧面和右侧面的防滑结构,设置在壳体八个角部的缓冲垫;所述天线通过无线通讯模块与mcu模块电连接;所述充电口与充电电池电连接;所述充电电池通过电源开关与lcd触摸屏及mcu模块电连接;所述mcu模块分别与lcd触摸屏及蜂鸣器电连接;所述手带单元包括位于壳体背面中部的兜布以及与兜布四角分别连接的弹性带;所述弹性带的另一端分别固定在壳体背面四个角部。
[0147]
手持终端设计整体界面优化、方便操作、人机交互效果良好,结构符合人体工程学布局。两个便携式手持终端均可与高低网匍匐单元、冲刺单元、后台管理中心之间通过无线方式传输信息,其一方面接收高低网匍匐单元和冲刺单元现场光电开关检测到的信息(触网犯规次数、进出网及考核起止时间),另一方面接收后台管理中心发送的考核学员信息并将学员的现场评分成绩回传至考核中心,它是整个训练考核系统的重要组成部分。手持终端的功能图如图11所示,手持终端软件设计流程图如图12所示。
[0148]
障碍物单元用于考核学员的敌情观测能力,设置土堆或者土坑,考察学员屈身前进、跃进、前翻滚、侧翻滚、敌情观测、出抢等姿态,利用障碍物监控摄像机获取学员利用地
形地物的战术动作原始图像视频,并传输至数据采集分析中心中的肢体动作评分模块进行预处理、分析统计、以及记录存储,最终将数据分析处理结果传输至后台管理中心。
[0149]
视频图像处理单元包括人脸识别模块、头部姿态评分模块、数据采集分析中心以及肢体动作评分模块和视频监控单元中的一种或多种;人脸识别模块、视频监控单元、头部姿态评分模块和肢体动作评分模块采集到的数据均传输至数据采集分析中心。数据采集分析中心部分包含数据采集、设备管理、统计分析、资源调配,对学员进行人脸识别并管理人脸库,分析并对在考核当中的头部姿态、屈身前进、跃进、前翻滚、侧翻滚、出抢等姿态进行量化评分,最终对考核当中产生的各项数据进行存储,并且为后台管理中心提供数据支持。视频监控单元、视频图像处理单元和后台管理中心的连接关系如图6所示。
[0150]
如图7所示,数据采集分析中心用于控制人脸识别模块、头部姿态评分模块和肢体动作评分模块的采集方式,以及对接收到的人脸识别模块数据、视频监控单元数据、头部姿态评分模块数据和肢体动作评分模块数据进行预处理、分析统计以及记录存储,并将数据分析处理结果传输至后台管理中心。本实施例中还设有nvr(网络硬盘录像机),nvr用于记录存储原始视频图像片段,具体的,数据采集分析中心对原始图像视频片段进行标记,被标记的原始图像视频片段传输至nvr进行记录存储;同时数据采集分析中心将标记的时间戳传送至后台管理中心,后台管理中心通过标记的时间戳可对原始图像视频片段访问查找。
[0151]
数据采集分析中心是数据采集与数据处理的核心,包括图像采集和条件触发模组,可以控制采集方式以及分析采集数据形成对学员考核的评价体系。其功能包括:相应数据采集触发条件、对接收到的数据进行预处理、将无效数据排除、根据模块对数据进行分析统计、对每个计分点的数据进行记录、数据中转服务,并提供给后台管理中心、统一协调管理每个识别评分模块,让其最大限度利用计算资源。系统采用tcp/ip协议与udp协议协同配合方式,在其之上构建应用体系,既保证传输速率也保证传输质量;针对前端采集模块中的健康状态进行跟踪。
[0152]
人脸识别模块包括一台人脸信息采集摄像机,用于采集人脸信息、人脸识别以及自动匹配学员信息。人脸识别分为四个过程:人脸检测、人脸对齐、特征提取、特征匹配。其中,特征提取作为人脸识别最关键的步骤,提取到的特征更偏向于该人脸“独有”的特征,对于特征匹配起到举足轻重的作用,而神经网络和模型承担着提取特征的重任,优秀的网络和训练策略使得模型更加健壮。在前期采集到学员信息后,通过上述过程将人面部数据进行结构化存储,在后续训练考核过程中,前端采集设备会自动匹配学员信息;训练考核时学员只需在考核准备区接受采集识别准备就绪信号即可,这样即节省了考核人员录入信息数据时间也尽量避免了人为录入错误所带来的风险。
[0153]
头部姿态评分模块用于在全局坐标系统内通过图像识别的方法获得学员头部图像,并计算头部方位角,判断当前时刻头部的偏航角、滚转角和俯仰角是否落入相应的设定范围内。
[0154]
匍匐前进时学员观察前方是否符合标准就基于这样的技术,我们通过该技术采集到学员头部姿态后对其姿态所指示的角度进行水平切面与垂直切面的分析,计算出头部方位角,继而可以判断当前时刻头部的偏航角、滚转角或俯仰角是否落入相应的设定范围内,因此可以量化学员考核标准。
[0155]
头部姿态评分模块通过以下步骤实现头部姿态评分:
[0156]
1)构建第一主干网络模型,实时采集学员头部图像并识别学员头部图像;所述第一主干网络模型为darknet-53主干网络;
[0157]
1.1)所述darknet-53主干网络包括自输入端到输出端依次连接的多个卷积块和全连接层;每个卷积块包括依次连接的卷积层、并行设置的批归一化层和激活层;所述卷积层由1x1和3x3的卷积核组成;当卷积的步长默认为1时,填充默认为一致;当卷积步长为2时,填充为有效;
[0158]
1.2)将darknet-53主干网络进行下采样,每次采样步长为1或2;然后将 darknet-53主干网络的中间层和倒数第二层的上采样进行拼接,形成新的优化网络,用于不断迭代新的样本训练学习,得到头部模型;
[0159]
1.3)通过损失函数优化训练头部模型;所述损失函数为目标定位偏移量损失、目标置信度损失以及目标分类损失中的一种或多种;
[0160]
1.4)采集待考核学员头部图像信息,输送至头部模型,识别学员头部图像;
[0161]
2)计算头部方位角
[0162]
2.1)构建第二主干网络模型,第二主干网络模型为resnet50主干网络;如图16所示,resnet50主干网络包括三个全连接层,所述三个全连接层分别对应头部方位角的偏航角、滚转角和俯仰角;所述resnet50主干网络的映射区间范围为[-99, 99];每个全连接层在所述映射区间范围内单独做预测,且单独做预测的全连接数均为二进制数;
[0163]
2.2)对构建的resnet50主干网络进行训练,得到训练后的resnet50主干网络,并获取实际标注数据;
[0164]
2.3)将步骤1.4)中识别的学员头部图像,输送至步骤2.2)训练后的resnet50 主干网络进行头部方位角计算;
[0165]
2.3.1)将学员头部图像中头部方位角的偏航角、滚转角或俯仰角分别映射到[-99, 99]区间内,并分别将映射区间范围中-99到 99共199个数值依次进行分类,三个为一组,中间间隔作为离散类别;
[0166]
2.3.2)将步骤2.3.1)得到的离散类别通过softmax函数操作后归一化为概率值,全连接层中所有离散类别数据的概率值相加为1;
[0167]
2.3.3)将步骤2.3.2)得到的概率值和对应的离散类别相乘并求和,得到期望值;通过期望值和实际标注数据的角度计算均方差,最终通过端到端训练输出头部方位角;
[0168]
3)判断当前时刻头部方位角的偏航角、滚转角或俯仰角是否落入相应的设定范围内;若否,则按照扣分规则进行相应的扣分操作,并给出得分;若是,则直接给出得分。
[0169]
肢体动作评分模块利用人体形态进行人体动作识别,并计算人体动作与标准动作之间的欧式距离对人体动作与标准动作进行比较;人体形态比如外形、深度、光流、人体骨架,动态骨骼模态可以自然地由人类关节位置的时间序列表示。然后,通过分析其动作模式可以做到人类行为识别。因此可以利用部分亲和区域的自下而上的人体姿态估计对其动作进行分析从而得出其动作与标准动作之间的评分。比如,在做正翻滚与侧翻滚的过程中,可以利用高动态摄像机对人体的关键点进行分析,从而可以将空间域模型应用在时间域当中,计算机就可以识别匹配学员的动作是正翻滚还是侧翻滚,并计算标准动作与采集到的数据之间的欧式距离从而得出相应的得分。
[0170]
肢体动作评分模块通过以下步骤进行处理分析:
[0171]
1)实时采集学员人体姿态图像并识别出目标图像;
[0172]
1.1)组建第一主干网络模型;
[0173]
第一主干网络模型由mbconv1和mbconv6构成。如图17所示,mbconv1 包括自输入端到输出端依次连接的1
×
1卷积、并行设置的批归一化层及激活层、 dwconv k
×
k、并行设置的批归一化层、激活层及压缩和激励模块、1
×
1卷积、批归一化层和add(融合模块),以及输入端到add(融合模块)之间的侧连接;其中,dwconv k
×
k的步长为1;如图18所示,mbconv6包括自输入端到输出端依次连接的1
×
1卷积、并行设置的批归一化层及激活层、dwconv k
×
k、并行设置的批归一化层、激活层及压缩和激励模块、1
×
1卷积和批归一化层;其中,dwconv k
×
k的步长为2。
[0174]
也可在上述第一主干网络模型的基础上进行优化,得到更为简化的第一主干网络模型,即把第一主干网络模型中原有的卷积层全部去掉,只保留从第一主干网络模型中提取的1
×
1卷积进行特征维度与通道的对齐,上采样与下采样均以插值的方式完成,最后,得到简化后的第一主干网络模型如下:
[0175]
第一阶段的算子为3
×
3卷积、分辨率为224
×
224、通道为32、层数为1;
[0176]
第二阶段的算子为mbconv1,k3
×
3、分辨率为112
×
112、通道为16、层数为1;
[0177]
第三阶段的算子为mbconv6,k3
×
3、分辨率为112
×
112、通道为24、层数为2;
[0178]
第四阶段的算子为mbconv6,k5
×
5、分辨率为56
×
56、通道为40、层数为2;
[0179]
第五阶段的算子为mbconv6,k3
×
3、分辨率为28
×
28、通道为80、层数为3。简化后的主干网络模型可以大大的减少计算量,使输出结果快速准确。
[0180]
1.2)从步骤1.1)组建好的第一主干网络模型中提取8、16、32倍下采样的特征;
[0181]
1.3)将步骤1.2)中提取8、16、32倍下采样的特征输入到特征金字塔网络做多尺度的特征融合;
[0182]
1.4)将步骤1.3)融合结果输出到检测头中检测识别出目标图像;
[0183]
检测头采用的focal损失函数是分布式focal损失函数。
[0184]
2)对人体姿态进行评估;
[0185]
2.1)构建轻量级网络;所述轻量级网络由六层卷积组成:
[0186]
第一层,conv/relu层,核心大小为3
×
3、步长为2、通道为32;
[0187]
第二层,conv/relu层,核心大小为3
×
3、步长为1、通道为64;
[0188]
第三层,conv/relu层,核心大小为3
×
3、步长为2、通道为64;
[0189]
第四层,conv/relu层,核心大小为3
×
3、步长为1、通道为64;
[0190]
第五层,transconv/bn/relu层,核心大小为2
×
2、步长为2、通道为64;
[0191]
第六层,transconv/bn/relu层,核心大小为2
×
2、步长为2、通道为32;
[0192]
2.2)通过快速姿态蒸馏模型训练方法,将潜在的姿态从一个预先训练好的教师模型转移到构建好的轻量级网络中,形成学生模型;所述快速姿态蒸馏模型训练方法是通过人体关键骨节点热度图进行判别;
[0193]
2.3)通过跨步卷积对步骤1.4)检测识别出的目标图像做两次下采样;
[0194]
2.4)利用教师模型中所学的潜在的姿态来训练学生模型,接下来按图19流程,先将步骤2.3)两次下采样得到的目标图像输送至学生模型中,得到目标图像的置信度;接着将目标图像的置信度与预先设置的置信度标准值0.85
±
0.02 进行比较,大于置信度标准
值则输出人体关键骨节点热度图的图像显示,随后进入评分系统并输出得分;小于置信度标准值则进行相应的扣分操作,随后进入评分系统并输出得分。
[0195]
视频监控单元包括低/高姿匍匐监控摄像机、障碍物监控摄像机和冲刺监控摄像机;低/高姿匍匐监控摄像机用于获取低姿入网到高姿出网期间学员匍匐姿态的原始图像视频,摄像机装在匍匐单元的钢网上;障碍物监控摄像机用于获取学员利用地形地物的战术动作原始图像视频;冲刺监控摄像机用于获取学员在冲刺区域的战术动作的原始图像视频。摄像机具有强光抑制、高动态、三防、防污效果,根据拍摄角度要求,做到360度无死角监控。
[0196]
视频图像处理单元还包括部署调教单元,部署调教单元是针对现场视频图像采集终端较多,调试较为复杂的前提所设计的一套具备快速调试单元。该单元主要功能是为了考核场地每次快捷部署,因此提供视频较准、定位、对焦、以及通讯测试等功能的集成化单元,该单元具备轻便收纳以及三防属性方便每次数据采集分析中心部署于收纳。
[0197]
如图1和图8所示,后台管理中心用于将考核学员的信息通过无线网络发送至手持终端,接收手持终端传送的考核学员考核成绩,接收视频图像处理单元传送的视频处理结果,分析统计最终考核成绩,并将最终考核成绩发送至现场实时显示终端。后台管理中心对整个考核系统进行规划,将考核学员的信息通过无线网络发送至战斗运动手持终端和地形地物手持终端。手持终端获取考核学员考核成绩后,通过无线网络发送至后台管理中心;同时,视频监控单元通过有线网络将视频图像传送至数据采集分析中心进行样本比对分析,将视频图像处理完成后,通过有线方式将视频图像处理结果发送至后台管理中心;由后台管理中心对最终的考核成绩进行分析统计,将统计完成的考核成绩通过无线网络发送至现场实时显示终端,并将考核成绩存入数据库。
[0198]
后台管理软件功能如图13所示,后台管理中心主要包含考核软件,后台管理中心的考核软件主要用于对考核学员、考核内容、考核过程、考核结果的管理,对日常的考核和训练,记录、分析、存储学员的考核、训练成绩,对整个考核、训练活动进行规划、分析、统计,得出最终考核成绩,生成学员的考核状态变化表和个人训练日志,动态的反映学员的考核、训练情况。后台管理软件流程如图14所示。
[0199]
现场实时显示终端用于显示考核成绩。考试过程中,后台管理中心通过无线方式将学员考核成绩及考核状态发送至现场实时显示终端进行实时显示。本实施例中以滚动表格显示考核成绩,利用柱状图、饼状图、折线图等,对考核人员进度、考核状态、成绩评估进行统计展示,实现考核的实时可视化。根据用户需求,该单兵战术训练与考核智能系统主要是利用多对光电传感器代替传统铁丝网对训练者的进入、离开、跃进、冲刺以及训练过程中的违规触碰信号进行采集、处理、实时显示,并结合视频图像识别技术,对战术动作加以比对,以判断训练者通过全部掩体的时间,动作要领是否规范,采用无线传输方式,将考核成绩传送至后台管理中心进行分析统计,用于提高单兵考核训练的时效性、准确性、公平性。
[0200]
本发明一种单兵战术训练与考核方法,基于上述的考核智能系统,包括以下步骤:
[0201]
1)人脸识别
[0202]
1.1)通过人脸信息采集摄像机采集学员面部信息并传输至数据采集分析中心;
[0203]
1.2)数据采集分析中心通过人脸检测、人脸对齐、特征提取、特征匹配过程将前期采集到的学员面部信息进行结构化存储,并将存储数据上传至后台管理中心;
[0204]
1.3)自动识别匹配学员信息,匹配成功即进入匍匐单元考核;
[0205]
2)匍匐单元考核
[0206]
2.1)如图9所示,匍匐单元中的采集控制盒2进入上电初始化、自检模式;
[0207]
2.2)将采集控制盒2与战斗运动手持终端通过无线连接,连接异常则引发蜂鸣器报警,并返回到上电初始化、自检模式;连接正常则进行激光对射型光电开关对的红外线对齐检测,检测异常则将状态发送至战斗运动手持终端,并返回到上电初始化、自检模式;检测正常则进入考试模式;
[0208]
2.3)后台管理中心将步骤1.3)匹配成功的待考核学员信息通过无线网络发送至战斗运动手持终端,进入待考状态;同时开启低/高姿匍匐监控摄像机,用于获取低姿入网到高姿出网期间学员匍匐姿态原始图像视频;
[0209]
2.4)进入匍匐单元考核模式,考核学员进网时触发第一个计时传感器组202,与其连接的采集控制盒2开始计时,同时模组相机201开始拍摄;采集控制盒2 将考试信号上传至战斗运动手持终端;考核学员前进至变姿处,触发第二个计时传感器组202,采集控制盒2记录变姿时间,并将记录的时间上传至战斗运动手持终端;考核学员出网时触发第三个计时传感器组202,采集控制盒2记录出网时间,并将记录的时间传输至战斗运动手持终端;考核学员在匍匐前进过程中一旦触碰到上方犯规检测传感器组203的激光束,即产生犯规行为,采集控制盒2上相应的指示灯点亮,并发出蜂鸣警报提醒训练者调整姿态,同时将犯规信息传输至战斗运动手持终端;
[0210]
2.5)匍匐单元考核结束,战斗运动手持终端将考核成绩发送至后台管理中心;模组相机201拍摄得到的图像传输至数据采集分析中心进行分析处理,随后将数据采集分析中心处理后的数据信息传输至后台管理中心;低/高姿匍匐监控摄像机获取的原始图像视频发送至数据采集分析中心,经分析处理后传输至后台管理中心;
[0211]
2.6)低/高姿匍匐监控摄像机获取的原始图像视频发送至数据采集分析中心,数据采集分析中心对原始图像视频片段进行标记,被标记的原始图像视频片段传输至nvr进行记录存储;同时数据采集分析中心将标记的时间戳传送至后台管理中心,后台管理中心通过标记的时间戳可对原始图像视频片段访问查找;
[0212]
3)障碍物单元考核
[0213]
3.1)进入障碍物单元考核,开启障碍物监控摄像机用于获取学员利用地形地物的战术动作的原始图像视频;
[0214]
3.2)障碍物单元考核结束,将障碍物监控摄像机获取的原始图像视频传输至数据采集分析中心,经分析处理后传输至后台管理中心;
[0215]
3.3)将障碍物监控摄像机获取的原始图像视频传输至数据采集分析中心,数据采集分析中心对原始图像视频片段进行标记,被标记的原始图像视频片段传输至nvr进行记录存储;同时数据采集分析中心将标记的时间戳传送至后台管理中心,后台管理中心通过标记的时间戳可对原始图像视频片段访问查找;
[0216]
4)冲刺单元考核
[0217]
4.1)如图10所示,冲刺单元中的采集控制盒2进入上电初始化、自检模式;
[0218]
4.2)将采集控制盒2与地形地物手持终端通过无线连接,连接异常则引发蜂鸣器报警,并返回到上电初始化、自检模式;连接正常则进行光电传感器的红外线对齐检测,检
测异常则将状态发送至地形地物手持终端,并返回到上电初始化、自检模式;检测正常则进入待考状态;
[0219]
4.3)后台管理中心将步骤1.3)匹配成功的待考核学员信息通过无线网络发送至地形地物手持终端,进入待考状态;同时开启冲刺监控摄像机,用于获取考核学员在冲刺区域的战术动作原始图像视频;
[0220]
4.4)进入冲刺单元考核模式
[0221]
考核学员达到终点,激光对射型光电开关对的红外激光束被遮挡,采集控制盒2即自动记录当前结束时间,并对记录的当前结束时间进行分析判断处理,若成绩不合格,则蜂鸣报警;同时将记录的时间信息以及报警信息通过无线传输至地形地物手持终端;
[0222]
4.5)地形地物手持终端将考核成绩发送至后台管理中心,同时将冲刺监控摄像机获取的原始图像视频传输至数据采集分析中心,经分析处理后传输至后台管理中心;
[0223]
4.6)将冲刺监控摄像机获取的原始图像视频传输至数据采集分析中心,数据采集分析中心对原始图像视频片段进行标记,被标记的原始图像视频片段传输至nvr进行记录存储;同时数据采集分析中心将标记的时间戳传送至后台管理中心,后台管理中心通过标记的时间戳可对原始图像视频片段访问查找。
[0224]
5)后台管理中心对考核学员的匍匐单元考核结果、障碍物单元考核结果以及冲刺单元考核结果进行分析统计,并将最终考核成绩发送至现场实时显示终端。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。