1.本发明涉及医疗器械技术领域,具体地涉及一种电动软式支气管镜。
背景技术:
2.支气管镜是一种经口或鼻置入患者下呼吸道,用于做肺叶、段及亚段支气管病交的观察、活检采样、细菌学和细胞学检查,配合ct系统可进行摄影、示敏和动态记录的医疗器械。通过连接的活检取样附件,可以协助发现早期病交,可以开展息肉摘除等体内外科手术。它适用于支气管、肺部疾病研究以及术后检查等操作。随着内镜技术的快速发展,呼吸内镜下的治疗技术也越来越多,而大部分的呼吸内镜下治疗都需要医生一只手手持支气管镜进行手动操作偏摆、旋转动作,另一只手负责进给动作,此操作形式对医生的要求比较高,特别对于高精度的运动需求,手动操作达不到那么好效果。
技术实现要素:
3.针对上述存在的技术问题,本发明目的是提供一种电动软式支气管镜,实现自动控制,降低了医生使用支气管镜操作的困难,不需要医生向使用手持镜那样举着迸行操作,大大降低了医生的体力消耗。同时自动控制,使用精度更高,可以完成更复杂的支气管镜检查和手术。
4.本发明的技术方案是:本发明的目的在于提供一种电动软式支气管镜,包括:软镜,其的末端可弯曲、其的首端设有同轴连接的第一回转体和第二回转体;运动控制机构,其包括同轴且间隔设置的第一运动控制机构和第二运动控制机构,其中第一运动控制机构套设于所述第一回转体的外周并与所述第一回转体构成一组传动结构,所述第二运动控制机构套设于所述第二回转体的外周并与所述第二回转体构成一组传动结构;两根钢丝,所述两根钢丝的一端分别连接在所述第二回转体的相对的两侧、另一端相互靠近地穿入所述第一回转体内并平行延伸至与所述软镜的末端连接;当所述第一回转体和所述第二回转体反向等速旋转时,两根钢丝中的一根向外拉伸、另一根向内收缩,使得所述软镜的末端进行弯曲偏摆运动;当所述第一回转体和所述第二回转体同向等速旋转时,所述软镜进行回转运动;当所述第一回转体和所述第二回转体同向不等速旋转时,所述软镜同时进行回转运动及末端的弯曲偏摆运动。
5.与现有技术相比,本发明的优点是:本发明的电动软式支气管镜,通过两套运动控制机构与软镜上的两个同轴连接的回转体分别构成两组传动结构,通过改变两组传动结构的运动方式,实现自动控制,降低了医生使用支气管镜操作的困难,不需要医生向使用手持镜那样举着迸行操作,大大降低了医生的体力消耗。同时自动控制,使用精度更高,可以完成更复杂的支气管镜检查和手术。
附图说明
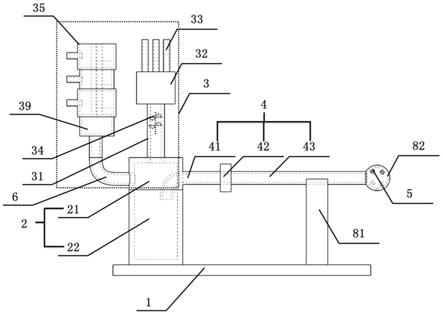
6.下面结合附图及实施例对本发明作进一步描述:图1为本发明实施例的电动软式支气管镜的软镜末端未弯曲时的部分剖切(仅仅第一传动齿轮和第二传动齿轮剖切)结构示意图;图2为本发明实施例的电动软式支气管镜的运动控制机构的结构示意图;图3为本发明实施例的电动软式支气管镜的软镜的结构示意图;图4为本发明实施例的电动软式支气管镜的软镜末端弯曲前(第一驱动机构和第二驱动机构反向旋转)的部分剖切(仅仅第一传动齿轮和第二传动齿轮剖切)的结构示意图;图5为本发明实施例的电动软式支气管镜的软镜末端弯曲后的部分剖切(仅仅第一传动齿轮和第二传动齿轮剖切)的结构示意图;图6为本发明实施例的电动软式支气管镜的软镜末端弯曲前(第一驱动机构和第二驱动机构同向旋转)的部分剖切(仅仅第一传动齿轮和第二传动齿轮剖切)结构示意图;图7为本发明实施例的电动软式支气管镜的立体结构示意图。
7.其中:1、软镜;11、第一回转体;110、凸柱结构;12、第二回转体;2、运动控制机构;21、第一运动控制机构;211、第一驱动机构;212、第一驱动齿轮;213、第一传动齿轮;22、第二运动控制机构;221、第二驱动机构;222、第二驱动齿轮;223、第二传动齿轮;3、钢丝。
具体实施方式
8.为使本发明的目的、技术方案和优点更加清楚明了,下面结合具体实施方式并参照附图,对本发明进一步详细说明。应该理解,这些描述只是示例性的,而并非要限制本发明的范围。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本发明的概念。
9.实施例:参见图1至图7,本发明实施例的一种电动软式支气管镜,包括软镜1、运动控制机构2和两根钢丝3。其中软镜1包括软管状的镜体部分,软镜部分的首端也即如图1所示的上端设有同轴连接的第一回转体11和第二回转体12。如图1所示,第一回转体11为靠近软镜1的首端也即如图1所示的软镜1的上端的回转体,第二回转体12为远离软镜1的首端的回转体。软镜部分的末端也即如图1所示的下端可弯曲也即形成有可弯曲部。第一回转体11和第二回转体12可发生相对转动,也可以不相对转动。运动控制机构2包括同轴且间隔设置的第一运动控制机构21和第二运动控制机构22,其中第一运动控制机构21套设于第一回转体11的外周并与第一回转体11构成一组传动结构,第二运动控制机构22套设于第二回转体12的外周并与第二回转体12构成一组传动结构。两根钢丝3的一端也即如图1所示的上端分别固定在第二回转体12左右两侧、另一端相互靠近也即如图1所示的倾斜向下穿过开设在第一回转体11上的通孔内并延伸至软镜1的末端且与可弯曲部的内壁的相对的两侧连接,需要说明的是,两根钢丝在软管内部是平行的,不是靠拢在一起的。通过改变两组传动结构的运动方式,来控制软镜1的偏摆回转和边偏摆边回转运动。如图4和图5所示,当第一回转体11和第二回转体12反向等速旋转时,两根钢丝3中的一根向外拉伸、另一根向内收缩,使得软镜1的末端进行弯曲偏摆运动。如图6所示,当第一回转体11和第二回转体12同向等速旋转
时,软镜1进行回转运动。当第一回转体11和第二回转体12同向不等速旋转时,软镜1同时进行回转运动及末端的弯曲偏摆运动也即边偏摆边回转运动。
10.具体的,参见图4,第一驱动机构211逆时针转动,带动第一驱动齿轮212逆时针转动使第一传动齿轮213顺时针转动,第一回转体11跟着第一传动齿轮213顺时针转动。第二驱动机构221顺时针转动,带动第二驱动齿轮222顺时针转动使第二传动齿轮223逆时针转动,第二回转体12跟着第二传动齿轮223逆时针转动。这样第一回转体11和第二回转体12的转动万向就不相同,致使两根钢丝3的一根往外拉伸、一根往里收缩,使出现图5中软镜1的末端弯曲的现象,这就是软支气管镜的偏摆。同理,第一驱动机构211顺时针转,第二驱动机构221逆时针转也也会使软支气管镜发生偏摆。只要控制第一回转体11和第二回转体12发生相对转动。软镜1的末端就会发生弯曲偏摆。
11.参见图6,第一驱动机构211和第二驱动机构221进行同向等速旋转会使第一回转体11和第二回转体12也进行同向等速旋转,也就是第一回转体11和第二回转体12未发生相对转动,所以软镜1的末端未进行偏摆运动,又因为第一回转体11和第二回转体12进行了等速同向旋转,所以第一回转体11、第二回转体12、钢丝3和软镜1进行了一个整体回转运动。即软支气管镜的回转运动。另外,第一驱动机构211和第二驱动机构221进行同向不等速旋转时,通过各自的传动机构,第一回转体11和第二回转体12也会发生同向不等速转动,此运动结合了偏摆和回转运动,即实现了可边偏摆边回转。
12.本发明实施例的电动软式支气管镜,通过两套运动控制机构与软镜1上的两个同轴连接的回转体分别构成两组传动结构,通过改变两组传动结构的运动方式,实现自动控制,降低了医生使用支气管镜操作的困难,不需要医生向使用手持镜那样举着迸行操作,大大降低了医生的体力消耗。同时自动控制,使用精度更高,可以完成更复杂的支气管镜检查和手术。
13.根据本发明的一些实施例,第一驱动齿轮212和第二驱动齿轮222等径。第一传动齿轮213和第二传动齿轮223等径。
14.根据本发明的一些实施例,如图3所示,在第二回转体12的左右两侧分别设有一个向外凸出延伸的凸柱结构110,两根钢丝3分别固定在对应的凸柱结构110上。该凸柱结构110可以为缠绕轮或者螺栓等,具体不做特别限定。
15.应当理解的是,本发明的上述具体实施方式仅仅用于示例性说明或解释本发明的原理,而不构成对本发明的限制。因此,在不偏离本发明的精神和范围的情况下所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。此外,本发明所附权利要求旨在涵盖落入所附权利要求范围和边界、或者这种范围和边界的等同形式内的全部变化和修改例。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。