用于确定在具有无把手门的车辆中使用的访问意图识别的装置和方法
背景技术:
1.本公开的示例性实施例涉及车门闩锁领域,特别是与无把手门相关联的车门闩锁。
2.无把手门需要称为“门呈现器”的致动器,其独立于或集成到位于所述门内的闩锁中。所述致动器将轻微旋转/打开门,足以让最终使用者插入他或她的手指以抓住门法兰/边缘,以便使用者可以手动完成开门。
3.在一些应用中,门呈现器被配置为通过使用车辆和授权的智能钥匙扣之间的通信回路(通常是射频(rf)通信回路)无线地操作。替代地或附加地,门呈现器被配置为通过使用近场通信(nfc)天线或经由nfc天线检测门禁系统的智能钥匙的其他等效装置来无线地操作。当在预定范围内检测到智能钥匙时,门禁系统将启动车门的门呈现器,以便车辆操作员可以打开车门。在一个实施例中,预定距离可以是例如0-3米。预定距离可因所使用的装置类型而变化,例如,射频(rf)通信回路可具有比近场通信回路更大的范围。
4.然而,如果车辆操作者为了执行与打开车门无关的任务(例如,将物品放入后备箱、支付停车计时器或沿着车辆的一侧行走)而靠近车辆等,即使智能钥匙非常靠近车门锁,也不希望车门闩锁的车门装置启动。此外,当携带智能钥匙的车辆操作员靠近车辆时,接近车辆的其他人不应自动使门呈现器启动(例如,行人在人行道上沿车辆经过)。
5.因此,希望对与无把手门一起使用的致动器或呈现器提供改进。
技术实现要素:
6.公开了一种用于车辆的无把手门禁系统。所述系统包括乘员检测部件,其包括第一检测部件和第二检测部件,其中所述第一检测部件被配置为检测所述无把手门禁系统预定距离内的装置,并且其中所述第二检测部件被配置为检测接近所述无把手门禁系统的物体或个人的意图。
7.除了上述的一个或多个特征之外,或者作为任何前述实施例的替代,所述第一检测部件(26)是能够与所述装置(27)无线通信的装置,并且所述无线通信是射频(rf)通信、低频率(lf)通信、蓝牙(bt)通信;uhf无线电波传输、近场通信(nfc)。
8.除了上述的一个或多个特征之外,或者作为任何前述实施例的替代,所述次级检测部件包括一对摄像机。
9.除了上述的一个或多个特征之外,或者作为任何前述实施例的替代,所述次级检测部件是雷达或脉冲微波雷达。
10.除了上述的一个或多个特征之外,或者作为任何前述实施例的替代,所述无把手门禁系统包括可操作地联接到门闩控制器的车辆闩锁。
11.除了上述的一个或多个特征之外,或者作为任何前述实施例的替代,所述车辆闩锁是机电闩锁。
12.除了上述的一个或多个特征之外,或者作为任何前述实施例的替代,所述无把手
门禁系统还包括门呈现器和可操作地耦合到所述车辆闩锁的传感器。
13.除了上述的一个或多个特征之外,或者作为任何前述实施例的替代,所述装置是驻留在移动电话上的数字签名。
14.还公开了一种车辆,其具有如前述权利要求中任一项所述的无把手门禁系统,其中,所述车辆还包括车门并且其中所述车门的外表面是无把手的。
15.除了上述的一个或多个特征之外,或者作为任何前述实施例的替代,所述次级检测部件位于所述车辆的中柱或b柱上。
16.除了上述的一个或多个特征之外,或者作为任何前述实施例的替代,所述次级检测部件被配置为分析靠近所述车辆的半球形体积中的移动和静止物体,和/或其中所述第二检测部件可操作地耦合到所述车辆的车窗调节器的控制器,并且其中如果所述第二检测部件检测到物体或个人靠近所述车窗调节器的关闭窗口,则第二检测部件将阻止所述车窗调节器的操作。
17.还公开了一种操作车辆的无把手门禁系统的方法,所述方法包括以下步骤:利用乘员检测部件的第一检测部件检测所述无把手门禁系统的预定距离内的装置;以及用第二检测组件确定接近所述无把手门禁系统的物体或个人的意图,其中,所述确定步骤在所述检测步骤之后执行。
18.除了上述的一个或多个特征之外,或者作为任何前述实施例的替代,所述确定步骤进一步包括确定当个人的手的位置接近车辆的车门时,和/或其中确定步骤进一步包括确定接近所述车门的所述物体或个人的速度和/或方向和/或距离/位置。
19.除了上述的一个或多个特征之外,或者作为任何前述实施例的替代,所述无把手门禁系统在识别出所述个人的手移动出所述物体的检测形状或个人形状时,致动所述无把手门禁系统的门呈现器,其中所述移动朝向所述车门的车门抓握区域。
20.除了上述的一个或多个特征之外,或者作为任何前述实施例的替代,所述第一检测组件是能够与所述装置无线通信的装置,并且所述无线通信是射频(rf)通信、低频(lf)通信、蓝牙(bt)通信;uhf无线电波传输、近场通信(nfc)中的任何一个,并且其中所述次级检测组件包括一对摄像机或者是雷达。
21.附图的简要说明
22.以下描述不应被视为以任何方式进行限制。参考附图,相同的元件以相同的方式编号:
23.图1是具有本公开的无把手车门系统的车辆的侧视图;
24.图2是具有本公开的无把手车门系统的车辆的立体图;和
25.图3是示出操作本公开的无把手门系统的方法的流程图。
具体实施方式
26.所公开的装置和方法的一个或多个实施例的详细描述在本文中通过示例而非限制的方式参考附图呈现。
27.在图1中,示出了具有无把手门禁系统12的车辆10。在一个实施例中,无把手门禁系统12被配置为打开车门14。无把手门禁系统12位于车门14内,使得车门的外表面可以在其外部没有任何把手的情况下制造表面。
28.车门14是无把手门并且可以安装为驾驶员侧门、乘客侧门或后乘客门。车门14也可以安装为车辆的后门,例如举升门、后备箱或尾门。无把手门禁系统12可操作地连接到车门14以将车门(或举升门、行李箱、后挡板等)保持在关闭位置并释放该车门以允许使用者将车门14移动到打开位置。
29.在一个实施例中,无把手门禁系统12包括可操作地耦合到门闩控制器18的车辆闩锁16。在所示实施例中,门闩控制器18包括微处理器、微控制器或其他能够执行用于执行控制门禁系统12的操作的控制算法的计算机可读数据或程序的命令。为了执行规定的功能和期望的处理,以及因此的计算(例如,执行傅立叶分析算法、此处规定的控制过程等),控制器可以包括但不限于处理器、计算机、内存、存储器、寄存器、定时、中断、通信接口、主要供能接口以及通过电容器、电池或它们的组合的外部或内部应急供能和输入/输出信号接口,以及包括至少一种前述的组合。例如,控制器可以包括输入信号滤波以实现对来自通信接口的此类信号的准确采样和转换或获取。
30.在一个实施例中,车辆闩锁16是机电闩锁,并且无把手门禁系统12还包括门呈现器20、传感器22和乘员检测部件24。乘员检测部件24还包括或可操作地耦合第一检测部件26检测能够与无把手门禁系统12通信的装置27。在一个非限制性实施例中,装置27可以是无把手门禁系统12的智能钥匙。在又一实施例中,装置27可以是能够与无把手门禁系统12无线通信的任何物体。在一个非限制性实施例中,装置27是rf-接收器-发射器。在另一个或替代实施例中,装置27可以是驻留在移动电话或任何其他等效设备(例如,智能手表、数字设备等)上的数字签名。在一个非限制性实施例中,第一检测部件26是近场通信(nfc)天线或射频(rf)发射器/接收器或任何类型的射频发射器/接收器或无线发射器/接收器,被配置为与授权装置27的发射器/接收器通信,从而在装置27和第一检测组件26或其他等效装置之间提供(rf)通信回路或其他方式。这种发射器/接收器和装置27的类型的非限制性示例包括但不限于那些能够:射频(rf)通信、低频(lf)通信、蓝牙(bt)通信、uhf无线电波传输、和近场通信(nfc)及其等效物。
31.在预定范围内检测到装置27时,无把手门禁系统12将在确认接近的个人或使用者的意图后致动门呈现器20,使得车辆操作者可以打开车门。在一个非限制性实施例中,预定范围可以是0-3米。预定范围可因所使用的装置类型而变化,例如,射频(rf)通信回路可具有比近场通信回路更大的范围。当然,其他范围旨在本公开的范围内。在一个实施例中并且当门呈现器20被致动时,车门14被定位为稍微距车身半开,因此使用者或操作者可以抓住车门14的一部分。在一个实施例中并且当车门14由于门呈现器20的操作,当车门14的位置与车身略微半开时,使用者在抓住车门14时将接触传感器22,传感器22向车门锁控制器18提供信号,使得车辆闩锁16能够完成车门14的打开。
32.在本公开的一个实施例中,乘员检测部件24还包括次级检测部件28,其与第一检测部件26结合将确定装置27的保持器是否打算打开车门14。例如,次级检测组件28是可以检测接近无把手门禁系统12的物体或个人的意图的装置。
33.在一个实施例中,次级检测组件28包括一对摄像机或可选地是雷达装置,在一个非限制性实施例中,其可以是脉冲微波雷达(在一个非限制性实施例中具有典型的从60ghz到100ghz的频率范围)放置在车辆10的区域中,该区域使次级检测组件28能够观察或检测车辆一侧的移动。当然,根据本公开的各种实施例,预期使用任何类型的雷达设备。在一个
非限制性实施例中,次级检测部件28位于车辆10的中柱或b柱上。当然,其他位置也是可以考虑的。
34.通过将次级检测部件28定位在车辆10的一侧,次级部件28能够分析靠近车辆10的半球形体积30中的移动和静止物体。参见例如图2。通过使用次级检测组件28,接近车辆的物体的位置和尺寸由相对于接近的物体的距离和角度定义。例如,传感系统通过构建3d地图来感知环境,该地图是定义对象形状和距离的金字塔(雷达)/锥体(视频像素)的堆栈/串联,可用于确定接近的对象的意图。次级检测部件28的准确度随着物体接近车辆而增加。对接近物体的运动、大小和位置的分析使得可以知道以下至少一项:1)接近物体是否打算打开车辆10的车门14;和2)障碍物是否会阻碍/限制门的打开14。
35.这样并且当使用者或车辆操作者接近车辆10并且装置27在预定检测范围内时,当装置27在例如上面提到的预定检测范围内时,无把手门禁系统12将通过第一检测部件26检测装置27。此时,一旦检测到装置27,无把手门禁系统12的门锁将通过操作地耦合到车辆锁闩16的门锁控制器18的操作解锁。此后,次级检测部件28将查看对于个人接近车辆10侧面的意图,例如,当他们接近车辆10时个人的手的位置以及他们接近车辆10的速度和方向。一旦次级检测组件28当检测到个人或使用者的必要意图时,门呈现器20通过可操作地耦合到门呈现器20的门闩控制器18的操作被激活,因为门已经通过第一检测部件26对装置27的检测而被解锁。可替代地,当次级检测部件28检测到个人或使用者事先激活门呈现20的必要意图时,无把手门禁系统12的门锁将被解锁。
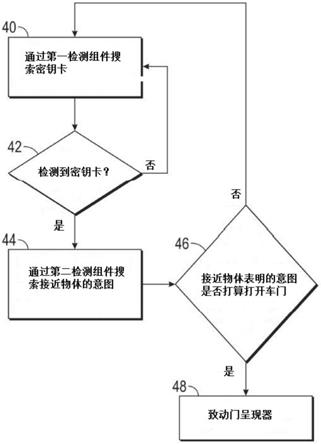
36.参照图3,并且为了确定接近的物体是否打算打开门14,无把手门禁系统12执行以下步骤。在初始步骤40,无把手门禁系统12通过第一检测部件26搜索装置27。如上所述,一旦第一检测部件26检测到装置27,当它在诸如上述范围的预定范围内时,门锁将被解锁。在决策节点42检测到装置27并且随后解锁无把手门禁系统12后,无把手门禁系统12然后在步骤44搜索接近物体的意图。另一方面,如果没有装置27在节点42处检测到,系统通过第一检测部件26继续搜索密钥卡。在决策节点46处,无把手门禁系统12通过第二检测部件28确定检测到的物体或使用者的意图是否打算打开车门14。如果决策节点46确定检测到的物体或使用者打算打开车门14,则无把手门禁系统12将在步骤48致动门呈现器20,使得车门14略微半开车门14和接触传感器22的一部分,从而向车门闩锁控制器18提供信号,从而使车门闩锁16可以完成车门14的释放。
37.另一方面,如果没有检测到打开车门14的意图,则无把手门禁系统12的操作将返回到步骤40。此时,如果无把手门禁系统12已经解锁因此,由于使用者或个人没有表现出所需的意图(例如,使用者或操作者离开车辆),无把手门禁系统12的门闩控制器18将重新锁定无把手门禁系统12。
38.在无把手门禁系统12的步骤44和46的操作期间,以下:1)使用者或物体的速度和方向与车门14的速度和方向相比较;2)物体或使用者在距离和位置上相对于门把手区域的位置;3)监测使用者或物体周围的区域以检测与使用者或物体的手的运动相对应的第二形状修改,例如,手朝向传感器22所在的门的抓握区域。在步骤3中,第二检测组件28确定个人或使用者的手或被检测物体的手相对于他们身体的位置,以及手的位置是否指示使用者或被检测物体正朝着门14的抓握区域伸出。如果是,则无把手门禁系统12将致动门呈现器20并且因此门14将准备好被使用者抓住。
39.在替代实施例中,无把手门禁系统12可用于在车门的窗户关闭时观察夹伤风险。例如,第二检测部件28可操作地耦合到车窗调节器的控制器,其中如果在关闭车窗附近检测到物体,则第二检测部件28将阻止车窗调节器的操作。例如并且在一个非限制性实施例中,如果在关闭的车窗附近检测到物体,则第二检测部件28将阻止自动操作的车窗调节器的操作(例如,远程进入激活)。
40.术语“大约”旨在包括与基于提交申请时可用的设备的特定量的测量相关联的误差程度。
41.这里使用的术语仅用于描述特定实施例的目的,并不旨在限制本公开。如本文所用,单数形式“一”、“一个”和“所述”也旨在包括复数形式,除非上下文另有明确指示。将进一步理解,术语“包含”和/或“包含”,当在本说明书中使用时,指定所述特征、整数、步骤、操作、元素和/或组件的存在,但不排除存在或添加一个或多个其他特征、整数、步骤、操作、元素组件和/或它们的组。
42.虽然已经参考一个或多个示例性实施例描述了本公开,但是本领域技术人员将理解,在不脱离本发明的范围的情况下,可以做出各种改变并且可以用等同物替代其元素。此外,在不脱离本公开的本质范围的情况下,可以进行许多修改以使特定情况或材料适应本公开的教导。因此,本公开不限于作为预期用于执行本公开的最佳模式而公开的特定实施例,而是本公开将包括落入权利要求范围内的所有实施例。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。