一种果园自动割草机机械避障装置
【技术领域】
1.本发明涉及机械除草技术领域,具体涉及一种果园自动割草机机械避障装置。
背景技术:
2.割草机(lawn mower)又称除草机、剪草机、草坪修剪机等。割草机是一种用于修剪草坪、植被等的机械工具,它是由刀盘、发动机、行走轮、行走机构、刀片、扶手、控制部分组成。
3.现在的割草机和以前的割草机相比,更加自动化,甚至智能化;在许多经过改进的割草机中,最前端会安装有相应的感应设备,当割草机前方出现障碍时,这种感应设备会被触发,从而提醒操作员进行避让,或者由控制模块下发指令使割草机自行进行避让。然而,现阶段所采用的感应装置大多采用声波雷达或激光雷达等电子装置来进行障碍物的判断,但该方式只能判断前方是否有障碍物,而无法判断前方障碍物的软硬程度,从而导致无法判断割草机是否能成功通过障碍物或者将障碍物修剪;同时,采用电子装置作为感应,其造价昂贵,结构精密,使用成本较高,容易造成故障,同时也维修困难。
技术实现要素:
4.本发明的发明目的在于:针对现阶段割草机中的电子感应装置无法判断前方障碍物的软硬程度的问题,提供一种果园自动割草机机械避障装置。
5.为了实现上述目的,本发明采用的技术方案如下:
6.一种果园自动割草机机械避障装置,包括侧弧板、正向板、活动感应部,两个所述侧弧板分别位于正向板的两侧,两个侧弧板和一个正向板形成半包围;所述活动感应部分别安装在两个侧弧板和正向板处。
7.优选的,所述活动感应部包括安装板、第一底座、第二底座、第三底座、滑轨、滑块,所述安装板一端垂直固定在侧弧板和正向板上,安装板的一侧与所述滑轨相互固定、另一侧排列安装所述第一底座和第二底座,所述滑轨与滑块滑动连接,所述第三底座安装在滑块上;还包括触点、固定杆、弹簧,所述触点安装在第一底座上,所述固定杆一端固定在第三底座上,另一端穿过第二底座,固定杆与触点处于一条线上,弹簧缠绕在固定杆上且位于第二底座与第三底座之间。
8.优选的,还包括侧弧板滑轨、侧弧板滑块、割草机本体,所述侧弧板滑轨与侧弧板相互固定且滑动安装在所述侧弧板滑块上,所述侧弧板滑块与所述割草机本体相互固定。
9.优选的,所述滑块固定在割草机本体上。
10.优选的,还包括测力传感器,所述测力传感器安装在第三底座上并与所述弹簧的端部接触。
11.优选的,还包括控制器,所述控制器接收测力传感器的信号,按照既定程序调整割草机本体的运行状态。
12.优选的,还包括保护罩和保护底板,所述保护底板安装在所述侧弧板、正向板、活
动感应部的下方,所述保护罩覆盖活动感应部的侧方和上方。
13.优选的,所述固定杆在靠近第三底座的一端加工有螺纹,由螺母将其固定在第三底座上。
14.综上所述,由于采用了上述技术方案,本发明的有益效果是:
15.本发明采用两个侧弧板和一个正向板来与前方和侧面障碍物接触,并通过活动感应部来实现触碰感应功能,使本发明具备正前方和侧前方的感应效果,且通过正向板和侧弧板的触碰来感应障碍物,在触碰过程中,可以感应到障碍物的具体情况。
16.本发明采用固定杆上的弹簧来反应障碍物的软硬程度,若障碍物过硬过大,导致割草机无法通过,那么在割草机前进的过程中,正向板或侧弧板会受到前方障碍物带来的阻力,迫使正向板或侧弧板带动第一底座、第二底座向后压,最终使触点下压至固定杆端部与固定杆接触;若障碍物质地较软且偏小,即使割草机从障碍物上方开过,触点也不会接触固定杆端部。该设计使得活动感应部具备判断是否能通过前方障碍的能力。
17.本发明还设置了侧弧板滑块,由于侧弧板受到的是侧向力,所以设置了侧弧板滑块和滑块与割草机本体相互固定,将两个机构共同成为侧弧板的支撑,提高了侧弧板的稳定性。
18.设置了测力传感器在弹簧端部,测力传感器直接检测弹簧的力,通过弹簧正向力的反馈,可以得知割草机在前进过程中,碰到前方障碍物时所受到的阻力,通过对该阻力数值的测量,可将割草机遇障情况实时数据化,以此来判断前方障碍的情况。设置控制器,将控制器与测力传感器结合使用,控制器接收测力传感器,并按预定程序调整割草机本体的运行,使割草机具备自动避障的能力。
19.设置保护罩和保护底板,使得在经过坑洼地段时,保护底板能保护底部结构,在经过草丛或枝叶茂密的路段时,保护罩能保护上部的结构。
【附图说明】
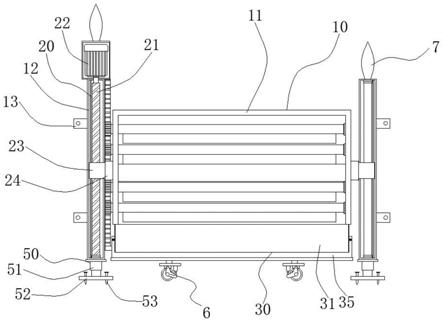
20.图1为本发明结构示意图;
21.图2为本发明保护罩与保护底板示意图;
22.1-侧弧板、2-正向板、3-活动感应部、4-滑轨、5-侧弧板滑块、6-割草机本体、7-保护罩、8-保护底板、301-安装板、302-第一底座、303-第二底座、304-第三底座、305-滑轨、306-滑块、307-触点、308-固定杆、309-弹簧、310-测力传感器。
【具体实施方式】
23.下面结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
24.需要说明的是,当组件被称为“固定于”另一个组件,它可以直接在另一个组件上或者也可以存在居中的组件。当一个组件被认为是“连接”另一个组件,它可以是直接连接到另一个组件或者可能同时存在居中组件。当一个组件被认为是“设置于”另一个组件,它可以是直接设置在另一个组件上或者可能同时存在居中组件。本文所使用的术语“垂直
的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
25.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
26.一种果园自动割草机机械避障装置,包括侧弧板1、正向板2、活动感应部3,两个所述侧弧板1分别位于正向板2的两侧,两个侧弧板1和一个正向板2形成半包围;所述活动感应部3分别安装在两个侧弧板1和正向板2处。
27.所述活动感应部3包括安装板301、第一底座302、第二底座303、第三底座304、滑轨305、滑块306,所述安装板301一端垂直固定在侧弧板1和正向板2上,安装板301的一侧与所述滑轨304相互固定、另一侧排列安装所述第一底座302和第二底座303,所述滑轨305与滑块306滑动连接,所述第三底座304安装在滑块306上;还包括触点307、固定杆308、弹簧309,所述触点307安装在第一底座302上,所述固定杆308一端固定在第三底座304上,另一端穿过第二底座303,固定杆308与触点307处于一条线上,弹簧308缠绕在固定杆308上且位于第二底座303与第三底座304之间。
28.还包括侧弧板滑轨4、侧弧板滑块5、割草机本体6,所述侧弧板滑轨4与侧弧板1相互固定且滑动安装在所述侧弧板滑块5上,所述侧弧板滑块5与所述割草机本体6相互固定。
29.所述滑块36固定在割草机本体6上。
30.还包括测力传感器310,所述测力传感器310安装在第三底座34上并与所述弹簧39的端部接触。
31.还包括控制器,所述控制器接收测力传感器310的信号,按照既定程序调整割草机本体6的运行状态。
32.还包括保护罩7和保护底板8,所述保护底板8安装在所述侧弧板1、正向板2、活动感应部3的下方,所述保护罩7覆盖活动感应部3的侧方和上方。
33.本发明的方案原理及使用方法:
34.割草机在行进过程中,如果正前方有障碍物,那么正向板2会与障碍物接触,如果侧前方有障碍物,那么侧弧板1会与障碍物接触;随着割草机继续前进,由于前方障碍物的原因,正向板2或侧弧板1会在滑轨305和滑块306的作用下向后移动;同时,弹簧309被压缩,在测力传感器310的作用下,割草机在前方受到的阻力被实时测量出来,控制器对受力的结果进行分析,按照既定的程序,对割草机本体6的行进方式和方向进行调整,如果在割草机本体6行进的过程中,弹簧309被压缩至极限,使得触点307与固定杆308接触,那么则可以判定障碍物无法被割草机逾越,此时,可以由人工或控制器对割草机本体6的行进路线进行调整。
35.上述说明是针对本发明较佳可行实施例的详细说明,但实施例并非用以限定本发明的专利申请范围,凡本发明所提示的技术精神下所完成的同等变化或修饰变更,均应属于本发明所涵盖专利范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。