技术特征:
1.深空测距上下行设备零值的标定与分离方法,其特征在于,设待标定深空测量站为a站和b站,c站辅助标定站,l为月球表面着陆器,通过以下步骤对a站、b站进行上下行设备零值标定与分离;步骤1,选取合作式月球表面着陆器l作为标定靶目标,将a站作为主站进行观测;从时间t0到t1,使用a站发送上行信号,a站、b站、c站均接收月球表面着陆器转发的下行信号,获取三组距离和数据ρ
aa
(t),ρ
ab
(t),ρ
ac
(t);从时间t1到t2,使用b站发送上行信号,a、b、c三站接收月球表面着陆器转发的下行信号,获取三组距离和数据ρ
bb
(t),ρ
ba
(t),ρ
bc
(t);步骤2,对步骤1中的距离和数据分别进行修正,得到修正后的距离和实测数据ρ
′
aa
,ρ
′
bb
,ρ
′
ab
,ρ
′
ba
,ρ
′
ac
,ρ
′
bc
;步骤3,使用光行时回溯迭代法,求解距离和理论值;步骤4,将步骤2和3的结果对应相减,得到误差标定结果;将误差结果序列对时间求平均,得到系统偏差;步骤5,根据系统偏差将测站a、b的上下行设备零值进行精确的标定和分离。2.根据权利要求1所述的深空测距上下行设备零值的标定与分离方法,其特征在于,所述步骤2中,具体为:步骤2.1,对步骤1得到的六组距离和数据扣除地面测试获得的等效附加距离,完成转发器时延修正;步骤2.2,测量信号穿过大气,受到大气折射影响,传播路径增加引入时延;通过gnss双频接收机或大气折射经验模型予以修正;步骤2.3,利用高精度共视接收机,通过共视gnss卫星传递收发站站间钟差,钟差折算成距离误差,在测量数据中予以扣除。3.根据权利要求1所述的深空测距上下行设备零值的标定与分离方法,其特征在于,所述步骤3中,具体为:以a站上行b站下行为例;步骤3.1,以数据接收时刻t∈[t1,t2],着陆器r
l
(t)和下行测站位置r
b
(t)为初始值,进行光行时迭代,求解着陆器转发时刻t-τ1着陆器精确位置r
l
(t-τ1),获得理论下行距离τ1为下行光行时,即信号在t-τ1时刻,从着陆器出发,在t时刻,到达下行测站;步骤3.2,以着陆器转发时刻t-τ1,着陆器r
l
(t-τ1)和上行测站位置r
a
(t-τ1)为初始值,进行光行时迭,求解上行测站发送时刻t-τ
1-τ2上行测站精确位置r
a
(t-τ
1-τ2),获得理论上行距离τ2为下行光行时;步骤3.3,将所得结果相加,得到距离和的理论值同样方法获得4.根据权利要求3所述的深空测距上下行设备零值的标定与分离方法,其特征在于,所述步骤4中,系统偏差表示为:
。5.根据权利要求4所述的深空测距上下行设备零值的标定与分离方法,其特征在于,所述步骤5中,系统偏差等于各组合上下行设备零值之和,六组数据组成一个非齐次线性方程组:获得最小二乘解:至此,测站a、b的上下行设备零值得到精确的标定和分离。
技术总结
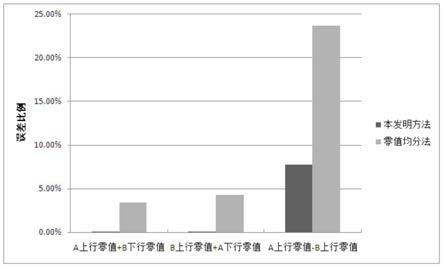
本发明公开了深空测距上下行设备零值的标定与分离方法,具体为:选取合作式月球表面着陆器L作为标定靶目标,将A站作为主站进行观测,使用A站及B站发送上行信号,A站、B站、C站均接收月球表面着陆器转发的下行信号,得到六组距离和数据;对距离和数据进行修正,得到修正后的距离和实测数据;使用光行时回溯迭代法,求解距离和理论值;将结果对应相减,得到误差标定结果;将误差结果序列对时间求平均,得到系统偏差;根据系统偏差将测站A、B的上下行设备零值进行精确的标定和分离。本发明方法相比于现有的比零值均分法,更准确的反映设备上下行零值情况,在深空异站收发测量中有明显的效益。益。益。
技术研发人员:叶楠 洪宇 何雨帆 黄静琪 李海玥 张伟 强立 任凯强 高云鹏
受保护的技术使用者:中国西安卫星测控中心
技术研发日:2021.11.30
技术公布日:2022/4/26
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。