技术特征:
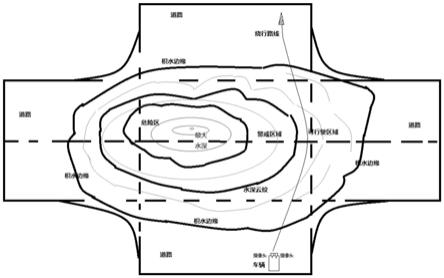
1.一种路面积水深度检测方法,其特征在于,包括步骤:100:采集积水路面的图像信息;200:对图像信息进行处理得到积水边缘点的像素坐标信息;300:获取各积水边缘点与车辆的相对位置坐标;400:基于所述相对位置坐标以及车辆在高精地图中的位置坐标,获得积水边缘点在高精地图中的世界坐标,进而获取积水边缘点构成的封闭曲线内区域的各点的海拔信息以及积水边缘点的海拔信息;500:基于各积水边缘点和封闭曲线内区域的各点的海拔坐标差,获得积水区域各点的深度分布信息;600:基于深度分布信息绘制积水区域的水深云纹图;700:将所述水深云纹图显示或投射在显示终端。2.如权利要求1所述的路面积水深度检测方法,其特征在于,在步骤200中,采用语义分割或实例分割的方法从所述图像信息中提取出积水边缘点的像素坐标信息。3.如权利要求1所述的路面积水深度检测方法,其特征在于,所述步骤200还包括:基于所述图像信息判断是否为积水区域,并在判断为“是”的情况下进行步骤300。4.如权利要求3所述的路面积水深度检测方法,其特征在于,采用卷积神经网络分类模型判断是否为积水区域。5.如权利要求1所述的路面积水深度检测方法,其特征在于,在步骤300中,采用视觉深度估计算法获取各积水边缘点与车辆的相对位置坐标。6.如权利要求1所述的路面积水深度检测方法,其特征在于,在步骤400中,所述海拔信息从高精度地图中直接获取;或者所述海拔信息基于高精度地图中的坡度角信息计算获得。7.如权利要求1所述的路面积水深度检测方法,其特征在于,在步骤600中,采用像素插值法对积水区域内的各点进行颜色插值,以绘制所述水深云纹图。8.如权利要求1所述的路面积水深度检测方法,其特征在于,在步骤700中,水深云纹图显示在车辆的车机显示屏上,或者通过vr技术投射在车辆前挡玻璃上。9.一种路面积水深度检测系统,其特征在于,其实施如权利要求1-8中任意一项所述的路面积水深度检测方法,其中所述路面积水深度检测系统包括图像采集装置、处理模块和显示终端;其中所述图像采集装置执行步骤100,所述处理模块执行步骤200-700。10.一种车辆,其特征在于,其安装有如权利要求9所述的路面积水深度检测系统。
技术总结
本发明公开了一种路面积水深度检测方法,其包括步骤:100:采集积水路面的图像信息;200:处理图像信息得到积水边缘点的像素坐标信息;300:获取各积水边缘点与车辆的相对位置坐标;400:基于相对位置坐标以及车辆在高精地图中的位置坐标,获得积水边缘点在高精地图中的世界坐标,进而获取积水边缘点构成的封闭曲线内区域的各点以及积水边缘点的海拔信息;500:由各积水边缘点和封闭曲线内区域的各点海拔坐标差,获得积水区域各点的深度分布信息;600:基于深度分布信息绘制积水区域的水深云纹图;700:将水深云纹图显示或投射在显示终端。相应地,本发明还公开了一种实施上述方法的路面积水深度检测系统,其包括图像采集装置、处理模块和显示终端。处理模块和显示终端。处理模块和显示终端。
技术研发人员:谢蔚 罗登科 朱国章 施亮
受保护的技术使用者:上汽大众汽车有限公司
技术研发日:2021.11.30
技术公布日:2022/4/26
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。