技术特征:
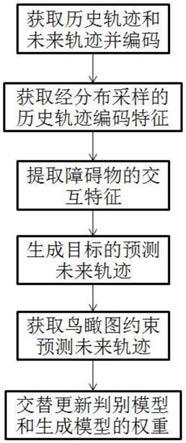
1.一种障碍物未来轨迹的生成方法,其特征在于,包括训练阶段和预测阶段,所述训练阶段同时运行轨迹生成模型和轨迹判别模型,所述轨迹生成模型生成一系列带约束的预测未来轨迹,所述轨迹判别模型负责判别所生成的预测未来轨迹的真假;所述训练阶段执行以下步骤:a1:获取预测目标以及所述预测目标周围的其他障碍物的历史轨迹与真实未来轨迹,将所述历史轨迹与真实未来轨迹进行编码后得到所述历史轨迹与真实未来轨迹的编码特征,获取经分布采样的历史轨迹编码特征;提取所述预测目标周围的障碍物的交互特征,生成所述预测目标的预测未来轨迹;a2:获取预测目标所在场景的可行驶区域鸟瞰图,对所述预测目标的预测未来轨迹进行约束;a3:交替更新所述判别模型和生成模型的权重;所述预测阶段执行以下步骤:b1:对所述预测目标以及预测目标周围的其他障碍物的历史轨迹进行编码得到所述预测目标以及预测目标周围的其他障碍物的历史轨迹编码特征,根据所述预测目标周围的其他障碍物的历史轨迹编码特征得到预测目标周围障碍物的交互特征;获取经分布采样的历史轨迹编码特征,由所述经分布采样的历史轨迹编码特征获得所述预测目标的预测未来轨迹;b2:将所述预测目标的预测未来轨迹投影至所述的可行驶区域鸟瞰图中对所述预测目标的预测未来轨迹进行约束;b3:执行步骤b1直到生成足够多条预测目标的预测未来轨迹。2.根据权利要求1所述的一种障碍物未来轨迹的生成方法,其特征在于,若场景中有n个障碍物,以所述第i个障碍物为预测目标,则所述预测目标的第t时刻的历史轨迹的坐标表达式为:i≤n,其中,τ为以t时刻为基准往前的τ个时刻,为预测目标t时刻时在世界坐标系下的坐标;所述预测目标的第t时刻的真实未来轨迹为:其中τ
′
为以t时刻为基准往后的τ
′
个时刻。3.根据权利要求2所述的一种障碍物未来轨迹的生成方法,其特征在于,所述训练阶段将历史轨迹hist
i
编码后得到历史轨迹编码特征,未来轨迹future
i
编码后得到未来轨迹编码特征;将所述历史轨迹编码特征和未来轨迹编码特征叠加后经过两个全连接层后得到均值μ和方差σ2用于学习分布z(μ,σ2)~p(z|hist
i
,future
i
),其中,z建模为高斯分布且z~n(0,i);计算z(μ,σ2)与高斯分布n(0,i)的距离损失为:l1(i)=kld(z(μ,σ2),n(0,i));对z(μ,σ2)进行随机采样得到一组隐变量,将所述隐变量经过多层感知机得到和历史轨迹编码特征相同维度的特征向量后经过归一化与所述历史轨迹编码特征相乘得到经分布采样的历史轨迹编码特征。4.根据权利要求2所述的一种障碍物未来轨迹的生成方法,其特征在于,对所述预测目标周围的所有障碍物的历史轨迹经过编码后得到周围障碍物的编码特征,对所述周围障碍物的编码特征求均值后得到所述预测目标周围障碍物的交互特征;将经分布采样的历史轨迹编码特征和预测目标周围障碍物的交互特征叠加后获得预测未来轨迹的最终编码特征,
将所述最终编码特征解码后得到预测的第i个预测目标的未来轨迹的表达式其中,prediction
i
为预测未来轨迹。5.根据权利要求3所述的一种障碍物未来轨迹的生成方法,其特征在于,对分布z(μ,σ2)进行k次随机采样生成k组预测目标的预测未来轨迹,第k组预测目标的预测未来轨迹的表达式为其中,(k∈k);在训练阶段,利用k组预测的第i个障碍物的未来轨迹prediction
ik
与真实未来轨迹future
i
计算得到均方差损失为:6.根据权利要求1所述的一种障碍物未来轨迹的生成方法,其特征在于,获取自动驾驶车辆所在场景的可行驶区域鸟瞰图;将所述预测未来轨迹中的点投影至可行驶区域鸟瞰图中,根据可行驶区域对预测未来轨迹的轨迹点进行约束。7.根据权利要求1所述的一种障碍物未来轨迹的生成方法,其特征在于,依次将所述预测未来轨迹中的轨迹点投影至鸟瞰图中,根据可行驶区域鸟瞰图,计算所述轨迹点到可行驶区域的最短距离其中,对应未来的时刻,若所述轨迹点投影在可行驶区域内,则计算约束损失其中,α,β,γ为超参数常量。8.根据权利要求1所述的一种障碍物未来轨迹的生成方法,其特征在于,所述判别模型的权重更新包括:将所述的历史轨迹和预测未来轨迹拼接成完整轨迹送入判别模型,所述完整轨迹经过编码后由多层感知器得到轨迹真假的概率值pred
ik
,与标签gt
ik
值计算交叉熵损失,对应标签gt
ik
为假;将历史轨迹和真实未来轨迹拼接后再次送入判别模型,完整轨迹经过编码后经过多层感知器得到轨迹是否真假的概率值pred
i_real
,与标签gt
i_real
值计算交叉熵损失,对应标签gt
i_real
为真;判别损失l4(i)计算为判别模型总损失loss
d_i
=l4(i);所述生成模型的权重更新包括:将所述的历史轨迹和生成轨迹拼接成一条完整轨迹送入判别模型,完整轨迹经过编码后经过多层感知器得到轨迹是否真假的概率值pred
ik
,与标签gt
ik
值计算交叉熵损失,此时,对应标签gt
ik
为真;此时判别损失表达为:生成模型总损失需要将生成模型的和判别模型的损失进行加权求和:loss
g_i
=α1l1(i) α2l2(i) α3l3(i) α4l4(i),其中,α1,α2,α3,α4为损失权重。9.根据权利要求2所述的一种障碍物未来轨迹的生成方法,其特征在于,预测阶段将所述预测目标以及预测目标周围的障碍物的历史轨迹编码后得到预测目标以及预测目标周围的障碍物的历史轨迹的编码特征,对编码特征求均值获得预测目标的周围障碍物的交互特征;根据学习的分布z(μ,σ2)进行k次随机采样后得到的隐变量得到特征向量,将所述特征向量归一化后与历史轨迹编码特征相乘得到经分布采样的历史轨迹编码特征;经分布采
样的历史轨迹编码特征和预测目标周围障碍物的交互特征叠加获得最终编码的特征,解码后获得k条预测未来轨迹表达式所述预测未来轨迹prediction
ik
中的点投影至可行驶区域鸟瞰图中,对预测未来轨迹进行约束,将超出可行驶区域轨迹去除。
技术总结
本发明公开了一种障碍物未来轨迹的生成方法。为了克服忽略其他交通参与者的干扰导致轨迹预测失真严重的问题,本发明采用结合CVAE和GAN提出一种多轨迹生成的方法,历史轨迹的编码特征结合周围交通参与者的交互特征,经过生成模型解码后生成未来轨迹,通过判别模型对生成的轨迹进行真假的判断同时结合可行驶区域的信息,对生成的未来轨迹进行约束,避免不合理轨迹的生成。通过多次随机采样,得到多条轨迹结合周围交通参与者的交互特征的多轨迹生成的方法,考虑了其他交通参与者的影响,网络自动学习到被预测目标在不同环境下的多意图行为,充分表达未来轨迹的不确定性,同时可行驶区域对未来轨迹的约束能在复杂场景下对被预测目标的未来轨迹进行预测。被预测目标的未来轨迹进行预测。被预测目标的未来轨迹进行预测。
技术研发人员:肖钟雯 王耀农 张震 陈啟煌
受保护的技术使用者:浙江零跑科技股份有限公司
技术研发日:2021.12.10
技术公布日:2022/4/26
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。