1.本发明涉及喷药机技术领域,具体是一种果园喷药机器人。
背景技术:
2.随着科学技术发展水平的不断提高,喷药机器人越来越多地被应用到果园喷药工作中,这在一定程度上降低了农民的劳动强度,同时也进一步提高了工作效率,而且农民不用需要身处农药喷雾环境内,避免了农药毒性对身体的伤害。
3.在公开号为cn212260259u的中国专利中公开了一种履带移动式智能型果园喷药机器人,不但可以完成双排果树的喷药工作,而且可以有效提高施药精度,对于高度超过2.5米的果树,其依然可以满足树冠层的喷药需要,从而提高喷药机器人的适用范围。
4.但是上述技术方案中仅通过设置若干组喷头对两排的果树进行喷药,仅能够对果树两侧充分喷洒,药剂受到枝叶的阻碍很难进入果树的中部,尤其是在果实膨大期时该种现象尤为明显,在果实膨大期,为了预防发生果实掉落的现象,减少果树出现畸形果的可能性,需要对果树喷洒壮果蒂灵,进而提高果树营养运输量,增加果蒂的粗度,而该时期的果树枝叶繁茂,喷药机器人无法进入同一排相邻两组果树之间的支路对其果树中部进行喷洒,仅能够从干路对果树的两侧进行喷洒药剂,果树表面药剂附着量低,降低了装置的适用范围。
5.针对上述的技术缺陷,现提出一种解决方案。
技术实现要素:
6.本发明的目的在于提供一种果园喷药机器人,通过设置喷药机构,能够在利用红外图像摄像头对待喷洒区域进行实时识别的基础上,控制电动伸缩杆一将支撑板及其表面的喷药组件向果树的内部推动,并使药剂依次通过导流管、导流腔最后经喷头喷洒向果树,从而能够对果树的内部进行充分喷洒;且在该过程中,利用电动伸缩杆二带动齿条上下移动且齿条与齿轮相啮合,能够驱动转动管带动喷头转动,从而能够在喷洒过程中对药剂的喷洒方向进行改变及导向,增加药剂从喷头喷洒出过程中的受力的强度,从而提高了药剂的穿透性较,保证了果树表面的雾滴附着量,其解决了在果实膨大期时,由于果树枝叶繁茂,喷药机器人无法进入同一排相邻两组果树之间的支路对其果树中部进行喷洒,仅能够从干路对果树的两侧进行喷洒药剂,导致果树表面药剂附着量低的问题。
7.为实现上述目的,本发明提供如下技术方案:
8.一种果园喷药机器人,包括履带式行走底盘、智能控制柜以及储药箱,所述智能控制柜与药箱均安装在履带式行走底盘上方,所述智能控制柜的上方安装有喷药机构,且喷药机构包括固定架、支撑架、滑块、电动伸缩杆一、红外图像识别摄像头、支撑板以及喷药组件,所述支撑板固定连接于智能控制柜的上端外表面,且支撑板的上端外表面位于中部的位置固定连接有固定架,所述支撑板的上端外表面位于支撑板两侧的位置均开设有滑槽,且滑槽的内表面固定连接有导向杆,两组所述导向杆的外表面均滑动连接有滑块,且支撑
架固定连接于滑块的上端外表面,两组所述支撑架呈对称式分布于固定架的两侧,且固定架与两组支撑架之间均设置有电动伸缩杆一,两组所述支撑架外表面远离固定架的一侧设置有三组喷药组件,三组所述喷药组件呈上下等距离分布于支撑架表面,且支撑架的上端外表面安装有红外图像识别摄像头;
9.所述喷药组件导流管、软管、齿轮、转动管、喷头、连接孔、导流腔、转动杆以及增压叶片,所述导流管与支撑架固定连接,且导流管的外表面套接有转动管,所述转动管与支撑架转动连接,且转动管内表面与导流管外表面紧密贴合,所述软管连通于储药箱与各组导流管之间,且导流管的内表面开设有连接孔,所述转动管内部开设有导流腔,且转动管外表面与导流腔对应的位置设置有若干组喷头,且喷头与导流腔相通,所述支撑架表面位于三组喷药组件上方的位置固定连接有电动伸缩杆二,且电动伸缩杆二的下端外表面固定连接有固定板,所述转动管外表面靠近支撑架的一侧固定连接有齿轮,且齿轮的一侧啮合有齿条,所述齿条与三组齿轮均啮合,且齿条与固定板固定连接。
10.进一步的,所述转动管内表面远离支撑架的一端固定连接有转动杆,且转动杆依次贯穿至导流管的内部并与支撑架转动连接,所述转动杆的外表面呈环形等距离固定连接有若干组增压叶片,所述转动杆与导流管转动连接,且两者连接处设置有密封圈。
11.进一步的,与位于最上方的喷药组件对应的连接孔与导流腔的数量均为一组,且该组连接孔开设于导流管的正下方;
12.与位于中部的喷药组件对应的连接孔与导流腔的数量均为两组,两组所述连接孔分别开设有导流管的两侧;
13.与位于最下方的喷药组件对应的连接孔与导流腔的数量均为一组,且该组连接孔开设于导流管的正上方。
14.进一步的,与位于最下方以及最上方两组喷药组件对应的转动管外表面靠近导流腔两侧的位置均固定连接有导流板一,两组相对应导流板一呈中心对称式分布于转动管外表面;
15.与位于中部的喷药组件对应的转动管外表面固定连接有两组导流板二,两组所述导流板二呈中心对称式分布于两组导流腔之间,且导流板二的横截面呈梯形。
16.进一步的,所述转动管内部与导流板一、导流板二对应的位置开设有腔体,且腔体延伸至与其对应的导流板一、导流板二的内部,所述导流板一外表面靠近喷头的一侧、导流板二的外表面的两侧及其一端均呈镂空状,所述转动管外表面远离支撑架的一侧与腔体对应的位置呈镂空状,所述腔体的内部固定连接有若干组扇叶。
17.进一步的,所述智能控制柜的内部设置有plc控制器、卫星定位模块、速度传感器及蓄电池,蓄电池作为该装置中所有用电部件的供电电源。
18.与现有技术相比,本发明的有益效果是:
19.1、本发明中,通过设置喷药机构,能够在利用红外图像摄像头对待喷洒区域进行实时识别的基础上,控制电动伸缩杆一将支撑板及其表面的喷药组件向果树的内部推动,并使药剂依次通过导流管、导流腔最后经喷头喷洒向果树,从而能够对果树的内部进行充分喷洒;且在该过程中,利用电动伸缩杆二带动齿条上下移动且齿条与齿轮相啮合,能够驱动转动管带动喷头转动,从而能够在喷洒过程中对药剂的喷洒方向进行改变及导向,增加药剂从喷头喷洒出过程中的受力的强度,从而提高了药剂的穿透性较,保证了果树表面的
雾滴附着量;
20.2、本发明中,通过在导流管的内部设置转动杆以及增压叶片,在齿条驱动转动管转动的过程中,转动杆带动其表面的增压叶片随着转动管转动,因此在能够对导流管内部的药剂进行充分搅拌保证其浓度均匀的同时,加强了药剂喷洒时的压力,扩大了药剂喷洒范围,进一步提高了装置的使用效果;
21.3、本发明中,通过设置与不同高度喷药组件对应的连接孔的开设位置不同,能够针对提高药剂喷洒过程中的精确度,从而降低药剂的浪费,增加叶片或者果实表面药剂的附着量;
22.4、本发明中,通过设置导流板一、导流板二以及扇叶,能够在转动管转动的过程中加快喷药组件附近空气的流速,促使果树表面叶片摆动,从而能够保证叶片上下表面均匀附着药剂,同时利用扇叶随着转动管转动产生的风力,能够对药剂的方向进行导向,使药剂充分喷洒在果树表面,提高药剂的利用率。
附图说明
23.为了便于本领域技术人员理解,下面结合附图对本发明作进一步的说明;
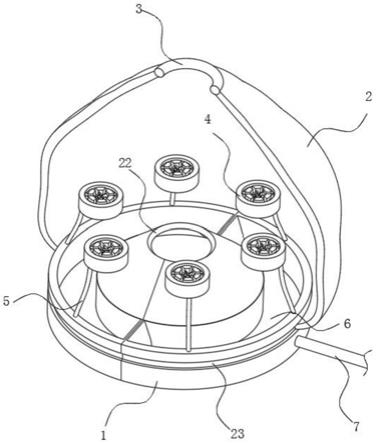
24.图1为本发明的整体结构示意图;
25.图2为本发明的图1的a区域的放大图;
26.图3为本发明的图1的b区域的放大图;
27.图4为本发明的齿条与齿轮的结合视图;
28.图5为本发明的位于最上方的喷药组件结构视图;
29.图6为本发明的位于中部的喷药组件结构视图;
30.图7为本发明的位于最下方的喷药组件结构视图。
31.附图标记:1、履带式行走底盘;2、智能控制柜;3、储药箱;4、喷药机构;41、固定架;42、支撑架;43、滑块;44、电动伸缩杆一;45、红外图像识别摄像头;46、支撑板;47、滑槽;48、导向杆;5、喷药组件;51、导流管;52、软管;53、齿轮;54、转动管;55、喷头;56、连接孔;57、导流腔;58、转动杆;59、增压叶片;6、电动伸缩杆二;7、固定板;8、齿条;9、导流板一;10、导流板二;11、腔体;12、扇叶。
具体实施方式
32.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
33.实施例一:
34.如图1-7所示,本发明提出的一种果园喷药机器人,包括履带式行走底盘1、智能控制柜2以及储药箱3,智能控制柜2与药箱均安装在履带式行走底盘1上方,储药箱3内部设置有电动喷药泵,智能控制柜2的内部设置有plc控制器、卫星定位模块、速度传感器及蓄电池,蓄电池作为该装置中所有用电部件的供电电源,智能控制柜2的上方安装有喷药机构4,且喷药机构4包括固定架41、支撑架42、滑块43、电动伸缩杆一44、红外图像识别摄像头45、
支撑板46以及喷药组件5,支撑板46固定连接于智能控制柜2的上端外表面,且支撑板46的上端外表面位于中部的位置固定连接有固定架41,支撑板46的上端外表面位于支撑板46两侧的位置均开设有滑槽47,且滑槽47的内表面固定连接有导向杆48,两组导向杆48的外表面均滑动连接有滑块43,且支撑架42固定连接于滑块43的上端外表面,两组支撑架42呈对称式分布于固定架41的两侧,且固定架41与两组支撑架42之间均设置有电动伸缩杆一44,当喷药机器人位于相邻两组果树之间时,喷药机器人停止行进,且智能控制柜2内的plc控制器向电动伸缩杆一44发出启动指令,电动伸缩杆一44分别驱动两组支撑架42带动滑块43沿滑槽47移动,两组支撑架42外表面远离固定架41的一侧设置有三组喷药组件5,三组喷药组件5呈上下等距离分布于支撑架42表面,且支撑架42的上端外表面安装有红外图像识别摄像头45,红外图像识别摄像头45对喷药机器人左右两侧的果树进行扫描;
35.喷药组件5包括导流管51、软管52、齿轮53、转动管54、喷头55、连接孔56、导流腔57、转动杆58以及增压叶片59,导流管51与支撑架42固定连接,且导流管51的外表面套接有转动管54,转动管54与支撑架42转动连接,且转动管54内表面与导流管51外表面紧密贴合,软管52连通于储药箱3与各组导流管51之间,通过电动喷药泵将储药箱3内的药液通过软管52泵入导流管51的内部,且导流管51的内表面开设有连接孔56,转动管54内部开设有导流腔57,且转动管54外表面与导流腔57对应的位置设置有若干组喷头55,且喷头55与导流腔57相通,当导流腔57与连接孔56相对应时,药剂通过喷头55均匀喷洒向果树,支撑架42表面位于三组喷药组件5上方的位置固定连接有电动伸缩杆二6,且电动伸缩杆二6的下端外表面固定连接有固定板7,转动管54外表面靠近支撑架42的一侧固定连接有齿轮53,且齿轮53的一侧啮合有齿条8,齿条8与三组齿轮53均啮合,且齿条8与固定板7固定连接,电动伸缩杆二6驱动齿条8反复上下移动,从而使转动管54转动;
36.在喷药机器人按照规划路线行进过程中,由智能控制柜2内的速度传感器实时反馈行进速度数据,保证喷药机器人以设定的行进速度移动,在移动过程中,由红外图像识别摄像头45对喷药机器人左右两侧的果树进行扫描,当判断果树进入喷药范围内时,降低喷药机器人的移动速度;
37.同时在该过程中智能控制柜2根据红外图像识别摄像头45实时扫描左右两侧的果树的情况,当喷药机器人位于相邻两组果树之间时,喷药机器人停止行进,且智能控制柜2内的plc控制器向电动伸缩杆一44发出启动指令,电动伸缩杆一44分别驱动两组支撑架42带动滑块43沿滑槽47移动,当喷头55完全进入果树区域时,电动伸缩杆停止运行,此时智能控制柜2内的plc控制器向储药箱3内的电动喷药泵以及电动伸缩杆二6发出启动指令,通过电动喷药泵将储药箱3内的药液通过软管52泵入导流管51的内部,同时电动伸缩杆二6驱动齿条8反复上下移动,从而使转动管54转动,当导流腔57与连接孔56相对应时,药剂通过喷头55均匀喷洒向果树,并且在药剂喷洒的过程中转动管54带动药剂转动,从而能够提高药剂的喷洒范围以及冲击力度,同时保证了施药的均匀性。
38.实施例二:
39.如图3-7所示,本实施例与实施例1的区别在于,转动管54内表面远离支撑架42的一端固定连接有转动杆58,且转动杆58依次贯穿至导流管51的内部并与支撑架42转动连接,转动杆58的外表面呈环形等距离固定连接有若干组增压叶片59,在转动管54转动的过程中,转动杆58带动其表面的增压叶片59随其转动并对经流导流管51内部进行搅拌,转动
杆58与导流管51转动连接,且两者连接处设置有密封圈,提高装置的密封性。
40.实施例三:
41.如图5-7所示,本实施例与实施例1、实施例2的区别在于,与位于最上方的喷药组件5对应的连接孔56与导流腔57的数量均为一组,且该组连接孔56开设于导流管51的正下方,能够对果树从上至下进行药剂喷洒;
42.与位于中部的喷药组件5对应的连接孔56与导流腔57的数量均为两组,两组连接孔56分别开设有导流管51的两侧,对果树的两侧进行药剂喷洒;
43.与位于最下方的喷药组件5对应的连接孔56与导流腔57的数量均为一组,且该组连接孔56开设于导流管51的正上方,能够对果树从下至上进行药剂喷洒,从而对果树的不同高度处进行不同方向的喷洒药剂,保证叶片的上下表面都可以均匀施药。
44.实施例四:
45.如图5-7所示,本实施例与实施例1、实施例2、实施例3的区别在于,与位于最下方以及最上方两组喷药组件5对应的转动管54外表面靠近导流腔57两侧的位置均固定连接有导流板一9,两组相对应导流板一9呈中心对称式分布于转动管54外表面;
46.与位于中部的喷药组件5对应的转动管54外表面固定连接有两组导流板二10,两组导流板二10呈中心对称式分布于两组导流腔57之间,且导流板二10的横截面呈梯形;转动管54内部与导流板一9、导流板二10对应的位置开设有腔体11,且腔体11延伸至与其对应的导流板一9、导流板二10的内部,导流板一9外表面靠近喷头55的一侧、导流板二10的外表面的两侧及其一端均呈镂空状,转动管54外表面远离支撑架42的一侧与腔体11对应的位置呈镂空状,腔体11的内部固定连接有若干组扇叶12;
47.在喷洒过程中,导流板一9与导流板二10随着转动管54转动,促使果树表面叶片摆动,从而能够保证叶片上下表面均匀附着药剂,同时扇叶12随着转动管54转动产生的风力,通过导流板一9以及导流板二10的镂空状处排出,能够对药剂的方向进行导向,提高药剂的喷洒范围,使药剂充分喷洒在果树表面,提高药剂的利用率。
48.本发明的工作过程及原理如下:
49.在喷药机器人按照规划路线行进过程中,由智能控制柜2内的速度传感器实时反馈行进速度数据,保证喷药机器人以设定的行进速度移动,在移动过程中,由红外图像识别摄像头45对喷药机器人左右两侧的果树进行扫描,当判断果树进入喷药范围内时,降低喷药机器人的移动速度;
50.同时在该过程中智能控制柜2根据红外图像识别摄像头45实时扫描左右两侧的果树的情况,当喷药机器人位于相邻两组果树之间时,喷药机器人停止行进,且智能控制柜2内的plc控制器向电动伸缩杆一44发出启动指令,电动伸缩杆一44分别驱动两组支撑架42带动滑块43沿滑槽47移动,当喷头55完全进入果树区域时,电动伸缩杆停止运行,此时智能控制柜2内的plc控制器向储药箱3内的电动喷药泵以及电动伸缩杆二6发出启动指令,通过电动喷药泵将储药箱3内的药液通过软管52泵入导流管51的内部,同时电动伸缩杆二6驱动齿条8反复上下移动,从而使转动管54转动,当导流腔57与连接孔56相对应时,药剂通过喷头55均匀喷洒向果树,并且在药剂喷洒的过程中转动管54带动药剂转动,从而能够提高药剂的喷洒范围以及冲击力度,同时保证了施药的均匀性;
51.在转动管54转动的过程中,转动杆58带动其表面的增压叶片59随其转动并对经流
导流管51内部进行搅拌,保证药剂混合的均匀度,同时加强了药剂喷洒时的压力,进一步提高了喷洒效果;
52.同时通过设置三组喷药组件5呈上中下分布,且与位于最上方的喷药组件5对应的连接孔56开设于导流管51的正下方,与位于中部的喷药组件5对应的连接孔56数量为两组并分别开设有导流管51的两侧,与位于最下方的喷药组件5对应的连接孔56开设于导流管51的正上方,能够对果树的不同高度处进行不同方向的喷洒药剂,保证叶片的上下表面都可以均匀施药;
53.并且在喷洒过程中,导流板一9与导流板二10随着转动管54转动,促使果树表面叶片摆动,从而能够保证叶片上下表面均匀附着药剂,同时扇叶12随着转动管54转动产生的风力,通过导流板一9以及导流板二10的镂空状处排出,能够对药剂的方向进行导向,提高药剂的喷洒范围,使药剂充分喷洒在果树表面,提高药剂的利用率。
54.以上内容仅仅是对本发明结构所作的举例和说明,所属本技术领域的技术人员对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,只要不偏离发明的结构或者超越本权利要求书所定义的范围,均应属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。