1.本发明涉及机械、电磁传动技术领域,具体为电磁行星齿轮。
背景技术:
2.传统的机械行星齿轮由齿圈、太阳轮、行星部件三部分组成,具有结构紧凑、传动负荷大、效率高和传动比可调等优点,广泛应用于航空航天、自行火炮、汽车、舰船、重型机械、冶金等诸多领域。然而依靠齿间啮合传递转矩的机械齿轮不可避免地存在着摩擦、振动、噪音等问题,其润滑和冷却系统在推高维护成本的同时降低了齿轮箱的可靠性,尤其在高速传动领域,齿间磨损、金属疲劳、弹性变形等问题更加突出,已经成为影响传输效率和寿命的重要因素。
3.利用磁场传递动力的非接触磁齿轮一直是各国研究人员的关注热点,尤其是2001年英国谢菲尔德大学d.howe教授提出的基于磁场调制原理的磁性齿轮结构更是吸引了众多学者和工程技术人员的注意。近些年来,围绕永磁齿轮的各类学术论文和相关专利不断涌现。但磁场调制的特性决定了气隙中存在很高的谐波含量。齿轮运行时,谐波在占用铁芯磁路的同时还会切割永磁体产生涡流导致永磁体发热,易造成退磁,缩短永磁体寿命。再者,永磁齿轮起动能力差,对负载转矩的波动、震荡起不到阻尼效果,动态性能不佳。这些不足导致永磁齿轮在实际生产实践中的应用受到限制。
4.复合电机结构是另一种实现非接触传动的技术方案。在20世纪90年代中期,瑞典皇家工学院的chandursadarangani教授提出的四象限能量变换器(four-quadrantenergytransducer,4qt),《thefour-quadrantenergytransducer[c].conferencerecordoftheieeeindustryapplicationsconference.pittsburgh:ieeepress,2002:390-397》这篇在2002年发表的论文。eriknordlund博士通过改进一体化能量传递装置(integratedenergytransducer,let)结构而提出的电无级变速器(electricalvariabletransmission,evt),该系统核心部件是一台双机械端口、双电气端口电机,可近似地看成是两台永磁同歩电机的叠加。
[0005]
2005年,(dualmechanicalportelectricmachines,dmp),美国俄亥俄州立大学的longyaxu教授在4qt、evt基础上提出了双机械端口电机发表了这篇概念并发表论文;《longyaxu.anewbreedofelectricalmachines-basicanalysisandapplicationofdualmechanicalportelectricmachines.8thicems》文中指出:dmp的三个部件(定子、外转子、内转子)中只要有任意两个部件可旋转即可以归为dmp概念模型。
[0006]
华中科技大学黄声华教授、万山明副教授、陈骁博士等人在结合无刷双馈电机和evt结构基础上提出了混合动力汽车用无刷电无级变速器系统,实现了双机械端口电机的电引出端口无刷化,其研究成果在国内具有代表意义。并申报了专利《无刷双机械端口电机》、《双永磁型无刷双馈双机械端口电机》、《一种无刷单馈双机械端口电机》。
[0007]
发明专利《一种永磁耦合调速电机》利用复合电机结构和变频控制器在实现调速的同时还具有低电压穿越能力。发明专利《电磁变速器》提出“逻辑电机”概念,利用外部控
制器实现调速。就基本原理而言,此类调速机构都可以归结到双机械端口电无级变速器范畴。
[0008]
以上所述的各类双机械端口电无级变速器的共同特点是拥有两个机械端口和至少一个电气端口,其调速过程都离不开外部电源和控制器的参与,其中《无刷双机械端口电机》、《双永磁型无刷双馈双机械端口电机》、《一种无刷单馈双机械端口电机》所提出的调速器需要两个变频电源和一个电池储能环节。过于复杂的结构和控制算法增加了成本,降低了系统的可靠性,给现场应用带来极大的不便,与传统机械齿轮箱尤其机械行星齿轮相比,不具备优势。
[0009]
基于上述,需要设计电磁行星齿轮来解决上述问题。
技术实现要素:
[0010]
本发明的目的在于提供电磁行星齿轮,以解决上述背景技术中提出的:1.解决机械齿轮箱高速运行时齿间磨损问题。
[0011]
2.解决机械机械行星齿轮高速运行时润滑难度大、维护成本高的问题。
[0012]
3.解决机械齿轮刚性连接,冲击转矩易造成轮齿金属疲劳、断齿问题。
[0013]
4.解决永磁齿轮动态稳定性差、转矩震荡问题。
[0014]
5.避免电无级变速器及各类双机械端口电机中电刷、滑环等装置引起的维护问题。
[0015]
6.避免电无级变速器及各类双机械端口电机中的外接电源和控制器的引入。
[0016]
7.与机械行星齿轮外特性完全一致,实现原有机械齿轮的兼容、对换功能的问题。
[0017]
为实现上述目的,本发明提供如下技术方案:电磁行星齿轮,包括固定架,所述固定架的内部设置有齿圈部件、行星部件和太阳轮部件。
[0018]
优选的,所述齿圈部件设置于固定架的内部,所述齿圈部件包括齿圈支架,所述齿圈支架设置于固定架的内部,所述齿圈支架上设置有齿圈铁芯,所述齿圈铁芯上设置有齿圈永磁体,所述齿圈铁芯的上设置有齿圈绕组,所述齿圈支架上设置有齿圈转轴。
[0019]
优选的,所述行星部件由行星外环铁芯、行星内环铁芯、行星外环绕组、行星内环绕组、行星转轴及行星支架组成,所述行星部件和行星内环铁芯由叠压硅钢片制成,所述行星支架位于行星外环铁芯和行星内环铁芯两个环形导磁铁芯中间,且行星支架通过定位槽与行星外环铁芯和行星内环铁芯紧密固定。
[0020]
优选的,所述太阳轮部件设置于固定架的内部,所述太阳轮部件包括太阳轮永磁体,所述太阳轮永磁体上设置有太阳轮铁芯,所述太阳轮永磁体上设置有太阳轮绕组,所述太阳轮永磁体上连接有太阳轮转轴。
[0021]
优选的,所述行星外环绕组和行星内环绕组相数必须保持相等。
[0022]
优选的,所述行星外环绕组和行星内环铁芯由铜材料制成,行星支架由不导磁材料制成。
[0023]
与现有技术相比,本发明的有益效果是:1、利用电磁感应原理实现了非接触齿轮传动,首次提出电磁行星齿轮概念,为后续的研究奠定了理论基础,具有原创性的理论价值。
[0024]
2、其工程意义在于非接触传动从根本上解决了机械齿轮箱运行时的齿面磨损、振
动、噪音、润滑问题,实现了免维护。
[0025]
3、电磁行星齿轮具有天然的过载保护能力,当负载超过其极限转矩只会导致失步震荡,并不会损坏齿轮本身,消除了机械齿轮的锁死、打齿现象。
[0026]
4、电枢绕组的阻尼特性提升了动态稳定性,对瞬时冲击转矩和震荡转矩具有一定的“柔性”,既避免了机械齿轮面对交变转矩时齿根部易产生金属疲劳的现象,其消纳震荡的特性也对原动机提供了一定的保护。
[0027]
5、在深井、高寒等无人值守的恶劣环境中,其非接触、免维护的特性使其优势更为明显。
[0028]
6、行星复合运动结构较传统发电机 电动机全功率变换系统传输效率更高。
[0029]
7、没有外部控制系统,不需要引入外部电源设备,使用便捷,可靠性高。一体化结构使其空间利用充分,重量轻,体积小,提升了转矩密度和功率密度。
[0030]
8、与机械行星齿轮拓扑、原理对偶,外特性一致。可实现与机械行星齿轮的无缝对接,具备在部分应用场合下替代机械齿轮箱的潜力。
附图说明
[0031]
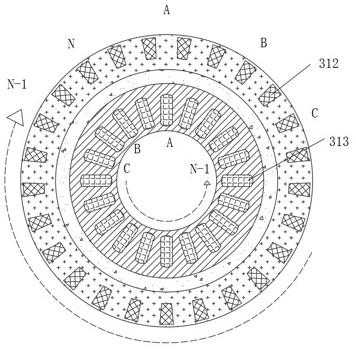
图1为本发明的行星外环铁芯结构示意图;图2为本发明的行星部件外环绕组和内环绕组结构连接状态示意图;图3为本发明的外永磁和内异步的拓扑侧视结构示意图;图4为本发明的外永磁和内异步的拓扑剖视结构示意图;图5为本发明的内永磁和外异步的拓扑侧视结构示意图;图6为本发明的内永磁和外异步的拓扑剖视结构示意图;图7为本发明的内永磁和外永磁的拓扑侧视结构示意图;图8为本发明的内永磁和外永磁的拓扑剖视结构示意图。
[0032]
图中:100、固定架;200、齿圈部件;210、齿圈支架;211、齿圈铁芯;212、齿圈永磁体;213、齿圈绕组;214、齿圈转轴 ;300、行星部件;310、行星支架;311、行星外环铁芯;312、行星外环绕组;313、行星内环绕组;314、行星内环铁芯;315、行星转轴;400、太阳轮部件;410、太阳轮永磁体;411、太阳轮铁芯;412、太阳轮绕组;413、太阳轮转轴。
[0033]
为便于说明其原理及功率转速关系,各个部件及符号作如下规定:1、齿圈部件与行星部件外圈环形铁芯组成的电磁耦合系统相数为mb,极对数为pb,行星部件外圈铁芯槽数为zb,每极每相槽数为qb;2、太阳轮部件和行星部件内圈环形铁芯组成的电磁耦合系统相数为ma,极对数为pa,行星部件内圈铁芯槽数为za,每极每相槽数为qa,;3、定义特征参数p,p=pb/pa;4、绕组电流频率为f、齿圈部件转速为nb、行星部件转速为nx、太阳轮部件转速为na、齿圈部件转矩为tb、行星部件转矩为tx、太阳轮部件转矩为ta;5、参考机械行星齿轮的标识方法,传动比由字母r和上下标表示,上标表示参照系部件,两个下标的顺序可理解为第一个下标部件相对于参照系部件的相对速度与第二个下标部件与参照系部件的相对速度之比,如rx ab=( na
ꢀ‑ꢀ
nx)/ (nb
ꢀ‑ꢀ
nx)。
具体实施方式
[0034]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0035]
请参阅图1-8,本发明提供的一种实施例:1、电磁行星齿轮,包括固定架100,图1所示的行星部件300由行星外环铁芯311、行星外环绕组312、行星内环绕组313、行星内环铁芯314、行星转轴315及行星支架310组成。行星外环铁芯311和行星内环铁芯314由叠压硅钢片制成。行星外环绕组312,行星内环铁芯314由铜材料制成,行星支架310由不导磁材料制成。如图1所示,行星支架310位于行星外环铁芯311和行星内环铁芯314两个环形导磁铁芯中间,通过定位槽与行星外环铁芯311和行星内环铁芯314紧密固定。
[0036]
2、行星部件300内部的行星外环绕组312和行星内环绕组313相数m必须保持相等,即m=ma=mb且m≥3。行星外环铁芯311与行星内环铁芯314的槽数需满足zb=2
×m×
pb
×
qb,za=2
×m×
pa
×
qa。
[0037]
3、行星部件300内部的行星外环绕组312和行星内环绕组313在各自的行星外环铁芯311与行星内环铁芯314中排布的空间顺序相反,即绕组分相后,按a-b-c
‑…
n顺序分别在内外环形铁芯槽中按顺时针、逆时针或逆时针、顺时针排布,关键在于保证两套绕组的空间排布顺序相反。
[0038]
4、行星部件300内部的行星外环绕组312和行星内环绕组313各自的尾端均采用星型连接方式,且两个尾端连接点相互隔离。行星外环绕组312和行星内环绕组313首端按对应的相顺序一一连接,其连接方式如图2所示。
[0039]
5、图1虽然只画出了径向嵌套结构,但只要满足3、4要求的各类绕组结构,均在本专利保护范围内。
[0040]
6、图3所示为外永磁和内异步的拓扑结构,图3是侧视图,图4是剖视图,具体实施方式为:当行星部件300与齿圈部件200有相对运动时,行星外环绕组312在齿圈永磁体212切割下产生感应电动势,进而在行星外环绕组312和行星内环绕组313中产生感应电流,其感应电流频率为:f=pb
×
(nx
‑ꢀ
nb) /60 hz,该电流在行星内环绕组313中形成旋转磁场,旋转磁场转速na1=60
×
f /pa nx,该旋转磁场切割太阳轮绕组412,在太阳轮绕组412中感应出电流,产生电磁转矩驱动太阳轮部件400以略低于旋转磁场转速na1的速度旋转。根据3、4的绕组排布及连接方式,三部件的转矩满足关系式ta tx tb=0。该拓扑结构适用于升速场合,行星转轴315作为原动机低速输入轴,太阳轮转轴413为高速输出轴,齿圈转轴214作为调整速比的控制轴。以齿圈作为运动参照系,升速比为rb ax=( na
ꢀ–ꢀ
nb)/ (nx
ꢀ–ꢀ
nb)。
[0041]
7、图5所示为内永磁 外异步的拓扑结构,图5是侧视图,图6是剖视图,具体实施方式为:当行星部件300与太阳轮部件400有相对运动时,行星内环绕组313在太太阳轮铁芯411切割下产生感应电动势,进而在绕组行星外环绕组312和行星内环绕组313中产生感应电流,其感应电流频率为:f=pa
×
(na-nx)/60 hz。该电流在行星内环绕组313中形成旋转磁场,旋转磁场转速nb1=60
×
f /pb nx,磁场切割齿圈绕组213,在齿圈绕组213中感应出电流,进而在齿圈部件200和行星部件300上产生电磁转矩。根据3、4的绕组排布及连接方式,
三部件的转矩满足关系式ta tx tb=0。该拓扑结构适用于减速场合,太阳轮转轴413为高速输入轴,行星转轴315为低速输出轴,齿圈转轴214作为调整速比的控制轴,以齿圈部件200作为运动参照系,降速比为rb ax=( na
ꢀ–ꢀ
nb)/ (nx
ꢀ–ꢀ
nb)。
[0042]
8、图7所示为内永磁 外永磁的拓扑结构,图7是侧视图,图8是剖视图,具体实施方式为:在升速场合,行星转轴315作为低速输入轴,太阳轮转轴413作为高速输出轴,齿圈转轴214作为调整速比的控制轴。当行星部件300与齿圈部件200、太阳轮部件400有相对运动时,行星外环绕组312、行星内环绕组313在齿圈永磁体212及齿圈铁芯211切割下产生感应电动势,进而在行星外环绕组312、行星内环绕组313中产生电流,电流频率f=pb
×
(nx-nb)/60hz,该电流在x4中产生的旋转磁场转速为na1=60
×
f /pa nx,太阳轮部件400在旋转磁场作用下以na1速度旋转,即na= na1。根据3、4的绕组排布及连接方式,三部件的转矩满足关系式ta tx tb=0。以齿圈作为运动参照系,升速比为rb ax=( na
ꢀ–ꢀ
nb)/ (nx
ꢀ–ꢀ
nb)。太阳轮绕组412为太阳轮部件400提供起动转矩,在遇到负载波动、冲击转矩时,a3的阻尼特性提高了系统的动态稳定性,在降速场合,太阳轮转轴413作为高速输入轴,行星转轴315作为低速输出轴,齿圈转轴214作为调整速比的控制轴。当行星部件300与齿圈部件200及太阳轮部件400有相对运动时,行星外环绕组312及行星内环绕组313在齿圈永磁体212及太阳轮铁芯411切割下产生感应电动势,进而在行星外环绕组312、行星内环绕组313中产生电流,电流频率f=pa
×
(na-nx)/60hz,该电流在齿圈绕组213中产生旋转磁场,转速为nb1=60
×
f /pb nx,行星部件300x在齿圈部件200转矩tb和太阳轮部件400转矩ta共同作用下以nb1速度旋转,即nb= nb1。根据3、4的绕组排布及连接方式,三部件的转矩满足关系式ta tx tb=0。以齿圈作为运动参照系,降速比为rb ax=( na
ꢀ–ꢀ
nb)/ (nx
ꢀ–ꢀ
nb)。齿圈绕组213为行星部件300提供起动转矩,在遇到负载波动、冲击转矩时,齿圈绕组213的阻尼特性提高了系统的动态稳定性。
[0043]
9、虽然6、7、8中所描述的三种拓扑结构有三个机械端口,即齿圈部件200、行星部件300、太阳轮部件400皆可旋转,但三个部件中无论哪一个部件固定的拓扑结构其运行特征都可视为6、7、8中该部件转速为零的一种工况。此时速比可调的电磁行星齿轮少了一个自由度,速比变为固定值,例如对于6中所描述的升速拓扑结构,如果齿圈部件200固定不动,则升速比为rb ax=( na
ꢀ–ꢀ
nb)/ (nx
ꢀ–ꢀ
nb)= na/ nx=p 1,其运行原理与6中所述完全一致。基于原理相似性原则,满足2、3、4、5要求的齿圈部件200、行星部件300、太阳轮部件400中某个部件不旋转的固定速比双机械端口相关拓扑结构皆在本专利保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。