1.本发明涉及机械设备故障诊断领域,尤其是涉及一种基于自适应降噪卷积神经网络的故障诊断方法。
背景技术:
2.随着机械设备智能化程度的提高,基于传统模型的故障诊断方法,又称模型驱动的故障诊断方法,逐渐被数据驱动的故障诊断的方法而取代,并在大量的机械装备上得到了广泛的应用,例如轴承、齿轮箱、传动轴等。
3.卷积神经网络是数据驱动故障诊断领域一种常用的深度学习的方法,并在各种机械设备的故障诊断上取得了大量的研究成果。基于卷积神经网络的数据驱动故障诊断方法,其主要利用设备信号数据集对卷积神经网络进行训练得到神经网络模型,利用训练好的卷积神经网络模型对设备进行故障诊断。然而,以卷积神经网络为代表的故障诊断算法往往忽略了实际工作场景,即机械的运行往往会产生许多额外的噪声干扰,例如机械结构之间的共振。虽然经过了大量的辅助设备和更高精度的传感器对信号进行过滤,但是数据中噪声的干扰依旧存在。
4.然而其卷积神经网络表现与数据的噪声程度有强烈的关系,一方面,当数据包含的噪声变大时,传统的卷积神经网络无法有效过滤噪声信号,卷积神经网络模型故障诊断的精确性往往会有大幅的下降。另一方面传统基于卷积神经网络的故障诊断方法也无法适应不同运行环境下的故障诊断。而如果单纯靠人为或者辅助设备进行降噪,往往需要耗费大量的人工精力,且具有不确定性。
技术实现要素:
5.本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种基于自适应降噪卷积神经网络的故障诊断方法。
6.本发明的目的可以通过以下技术方案来实现:
7.一种基于自适应降噪卷积神经网络的故障诊断方法,包括以下步骤:
8.步骤s1、检测机械设备振动信号,组成一维的振动数据集;
9.步骤s2、对振动数据集做灰度图化处理,获得灰度图数据库;
10.步骤s3、将灰度图数据库输入所构建的自适应降噪卷积神经网络进行训练,训练得到其自适应降噪神经网络模型;所述自适应降噪神经网络模型包括自适应滤波卷积层,全局平均池化层和全连接层,其中的自适应滤波卷积层由两个cnn层和一个自适应滤波器组成,自适应滤波器的阈值由自动设置阈值模块调节;
11.步骤s4、通过训练好的降噪神经网络模型进行故障诊断。
12.进一步地,步骤s1具体包括:
13.s11、采集机械设备的振动信号,组成一维含标签的振动数据集l(i),其中i表示一维振动数据中第i个数据点;
14.s12、从振动数据集中选取m*m个一维振动数据,将m*m中的每个数据点带入灰度计算式得到p(j,k),p(j,k)表示灰度图中第j行k列像素的大小;
15.s13、用p(j,k)组成m*m的灰度图。
16.进一步地,所述灰度计算式的表达式为:
[0017][0018]
其中,函数round表示四舍五入函数,确保p(j,k)是0到255的整数。
[0019]
进一步地,所述自适应降噪神经网络模型包括4个自适应滤波卷积层,1个全局平均池化层和1个全连接层。
[0020]
进一步地,所述自动设置阈值模块包含1个绝对值化层,1个全局池化层和2个一维cnn层。
[0021]
进一步地,所述自动设置阈值模块输出自适应阈值至自适应滤波器,实现阈值的自动设定;经过自适应滤波器过滤后的数据再与输入的图像数据进行相加,得到的结果再输入到下一个自适应滤波卷积层。
[0022]
与现有技术相比,本发明具有以下有益效果:
[0023]
本发明在卷积神经网络中加入了自适应滤波器,实现了对噪声信号的过滤;同时,本发明利用两层一维卷积层,实现了对自适应滤波器阈值的自适应设置,免去了人工设置阈值所造成的干扰,从而实现了抗噪能力强且准确性高的故障诊断。
附图说明
[0024]
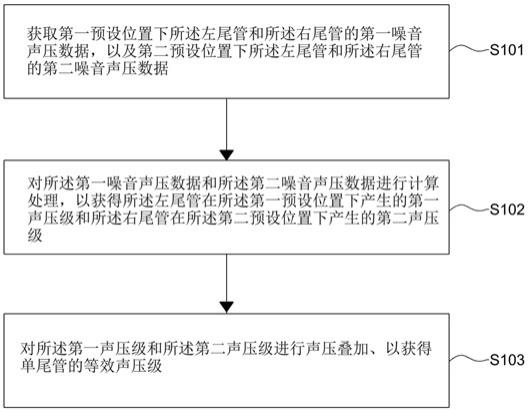
图1为本发明的流程示意图。
[0025]
图2为自适应降噪卷积神经网络的结构示意图。
[0026]
图3为自动设置阈值模块的结构示意图。
具体实施方式
[0027]
下面结合附图和具体实施例对本发明进行详细说明。本实施例以本发明技术方案为前提进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
[0028]
如图1所示,本实施例提供了一种基于自适应降噪卷积神经网络的故障诊断方法,具体包括以下步骤:
[0029]
步骤s1、检测机械设备振动信号,组成一维的振动数据集。
[0030]
步骤s2、对振动数据集做灰度图化处理,获得灰度图数据库。
[0031]
步骤s3、构建一个自适应降噪卷积神经网络包含4个自适应滤波卷积层,1个全局平均池化层,1个全连接层,其中的自适应滤波卷积层由两个cnn层和一个自适应滤波器组成,自适应滤波器的阈值由自动设置阈值模块调节。将灰度图数据库输入所构建的自适应降噪卷积神经网络进行训练,训练得到其自适应降噪神经网络模型。
[0032]
步骤s4、利用训练好的降噪神经网络模型进行故障诊断。
[0033]
一、一维振动数据集转换成灰度图
[0034]
检测机械设备振动信号,组成一维的振动数据集,对振动数据集做灰度图化处理,
获得灰度图数据库。其处理流程如下所示。
[0035]
(1)采集机械设备的振动信号,组成一维含标签的振动数据集,l(i),i∈[0,n]表示一维振动数据中第i个数据点。
[0036]
(2)从振动数据集中选取m*m个一维振动数据,将m*m中的每个数据点(l(i),i∈[0,m2])带入公式(1),得到p(j,k)。
[0037][0038]
其中,函数round表示四舍五入函数,以确保p(j,k)是0到255的整数。
[0039]
(3)用p(j,k)组成m*m的灰度图,p(j,k)表示灰度图中第j行k列像素的大小;
[0040]
采用上述方法形成多个灰度图然后组成灰度图数据库,用于后续的模型训练。
[0041]
二、利用灰度图数据库训练自适应降噪卷积神经网络
[0042]
(1)构建自适应降噪卷积神经网络;
[0043]
自适应降噪卷积神经网络包含4个自适应滤波卷积层,1个全局平均池化层,1个全连接层,其中的自适应滤波卷积层由两个cnn层和一个自适应滤波器组成,自适应滤波器的阈值由自动设置阈值模块调节,其中自动设置阈值模块包含1个绝对值化层,1个全局池化层,2个一维cnn层。其网络结构如图2所示。
[0044]
(2)灰度图输入所构建的自适应降噪卷积神经网络,训练自适应降噪神经网络模型,具体流程如下:
[0045]
尺寸为m*m的图像进入第一个自适应滤波卷积层,先经过两层的cnn层提取特征数据x
jk
(灰度图中的第j行k列像素的大小),提取后特征数据x
jk
再使用自适应滤波器进行过滤,其中自适应滤波器的自适应阈值是由自动阈值设置模块产生,如图3所示。自动设置阈值模块中特征数据x
jk
首先经过绝对值化层取绝对值,绝对值化后的数据通过全局平均池化层,全局平均池化的计算如公式(2)所示,
[0046][0047]
其中w和h分别代表整个图像的宽度和高度,g(x)表示全局平均池化层的输出。
[0048]
全局平均池化层将灰度图压缩成一个数。此一维数作为2层的一维cnn的输入,第一层一维cnn由relu函数激活,第二层一维cnn由sigmoid函数激活,经过两层的一维cnn处理后,最终得到自适应滤波器的自适应阈值,阈值计算如公式(3)。
[0049][0050]
其中σ(
·
)代表的是sigmoid函数,如公式(4)所示。sigmoid函数可以确保输出值在0到1的范围内。
[0051][0052]
代表两层一维卷积运算,其中k1和k2代表各层的卷积核,代表卷积运算,如公式(5)所示。
[0053]
[0054]
其中relu是一个常用的激活函数,如公式(6)所示。公式(6)中:表示卷积运算后的输出值;是通过relu函数后的值。
[0055][0056]
自动设置阈值模块输出自适应阈值至自适应滤波器,实现阈值的自动设定。经过自适应滤波器过滤后的数据再与输入的图像数据进行相加,得到的结果再输入到下一个自适应滤波卷积层,如此依次使用4个自适应滤波卷积层进行处理。处理后的数据通过全局平均池化层和全连接层进行分类,最终输出分类结果。上述全部的网络结构,组成自适应降噪神经网络模型。
[0057]
自适应降噪神经网络模型经过灰度图数据库的训练,自适应降噪神经网络模型不断地更新,最终得到训练完的自适应降噪卷积神经网络模型。
[0058]
三、利用自适应降噪卷积神经网络对故障进行诊断
[0059]
将故障数据输入自适应降噪卷积神经网络模型,实现对故障的诊断。
[0060]
四、算例分析
[0061]
为了更好的解释说明,本发明采用风力发电机齿轮箱的数据集对提出的方法进行实施验证,具体如下:
[0062]
采集风力发电机齿轮箱的振动数据,组成一维的振动数据集,对振动数据集做灰度图化处理,获得灰度图数据库。其处理流程如下所示。
[0063]
(1)采集机械设备的振动信号,组成一维含标签的振动数据集,l(i),i∈[0,n]表示一维振动数据中第i个数据点。
[0064]
(2)从振动数据集中选取m*m个一维振动数据,将m*m中的每个数据点(l(i),i∈[0,m2])带入公式(1),得到p(j,k),
[0065]
其中,函数round表示四舍五入函数,以确保p(j,k)是0到255的整数。
[0066]
(3)用p(j,k)组成m*m的灰度图,p(j,k)表示灰度图中第j行k列像素的大小;采用此方法形成多个灰度图然后组成灰度图数据库,用于后续的模型训练。
[0067]
(4)自适应降噪卷积神经网络具体流程如下:
[0068]
尺寸为m*m的图像进入第一个自适应滤波卷积层,先经过两层的cnn层提取特征数据x
jk
(灰度图中的第j行k列像素的大小),提取后特征数据x
jk
再使用自适应滤波器进行过滤,其中自适应滤波器的自适应阈值是由自动阈值设置模块产生,自动设置阈值模块中特征数据x
jk
首先经过绝对值化层取绝对值,绝对值化后的数据通过全局平均池化层,全局平均池化的计算如公式(2)所示,其中w和h分别代表整个图像的宽度和高度,g(x)表示全局平均池化层的输出。
[0069]
全局平均池化层将灰度图压缩成一个数。此一维数作为2层的一维cnn的输入,第一层一维cnn由relu函数激活,第二层一维cnn由sigmoid函数激活,经过两层的一维cnn处理后,最终得到自适应滤波器的自适应阈值,阈值计算如公式(3)。
[0070]
其中σ(
·
)代表的是sigmoid函数,如公式(4)所示。sigmoid函数可以确保输出值在0到1的范围内。
[0071]
代表两层一维卷积运算,其中k1和k2代表各层的卷积核,代表卷积运算,如公式(5)所示。
[0072]
其中relu是一个常用的激活函数,如公式(6)所示。公式(6)中:表示卷积运算后的输出值;是通过relu函数后的值。
[0073]
自动设置阈值模块输出自适应阈值至自适应滤波器,实现阈值的自动设定。经过自适应滤波器过滤后的数据再与输入的图像数据进行相加,得到的结果再输入到下一个含自适应滤波器的卷积层,如此依次使用4个自适应滤波卷积层进行处理。处理后的数据通过全局平均池化层和全连接层进行分类,最终输出分类结果。
[0074]
将自适应降噪神经网络性能于其他的4种卷积神经网络进行比较,分别为alexnet、lenet、resnet、drsn-cw。其结果如表1所示。
[0075]
表1各个方法在不同噪声下的性能表现
[0076][0077]
根据测试结果而言,本发明所构思的故障诊断方法,具有以下的优点。(1)本方法在卷积神经网络中加入了自适应滤波器,实现了对噪声信号的过滤。(2)利用两层一维卷积层,实现了对自适应滤波器阈值的自适应设置,免去了人工设置阈值所造成的干扰。
[0078]
以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。