1.本发明涉及湖泊环境监测技术领域,尤其涉及一种内陆湖水域环境监测系统及方法。
背景技术:
2.内陆湖(inland lake)是指处于河流的尾闾或独自形成独立的集水区域,湖水均不外泄入海的湖泊。内陆湖一般是咸水湖和淡水湖。内陆湖泊水位变化同样受入湖河川水情影响,相应于内陆河川的春、夏汛期,湖泊出现高水位。内陆湖泊水量补给系数小,年内水位变幅多<1米。因内陆湖泊的吞吐量较小,故其调节径流的作用亦较小,甚至没有。同时有些内陆湖泊因补给量小,蒸发强烈,致使湖水逐渐浓缩,形成咸水湖或盐湖。
3.传统的内陆湖区域环境监测,使用人工监测分析,不仅效率低成本高,而且难以按照理论最优模型对被测区域中的情况进行有效的实时监控。
技术实现要素:
4.本发明为了解决上述技术问题,提供了一种内陆湖水域环境监测系统及方法,其通过无人机投放监测装置,用户能够根据需要监测指定的水域,监测灵活,监测装置能够实时监测所在水域数据并判断所在水域当前的生态环境健康状态,提高了监测效率。
5.为了解决上述问题,本发明采用以下技术方案予以实现:
6.本发明的一种内陆湖水域环境监测系统,包括监测装置以及用于运送监测装置的无人机,所述监测装置包括浮台,所述浮台下方设有伸入水下的水下检测模块,所述水下检测模块包括用于检测内陆湖水域水体溶氧量的溶氧传感器s1、用于检测内陆湖水域水体ph值的水ph值传感器s2、用于检测内陆湖水域水体重金属离子浓度的重金属离子传感器s3、用于检测内陆湖水域水体氨氮含量的氨氮传感器s4、用于检测内陆湖水域水深的水深传感器s5,所述浮台上方设有水上检测模块,所述水上检测模块包括微处理器、gps模块、第一无线通信模块、用于检测内陆湖气温的温度传感器s6、用于检测内陆湖空气湿度的湿度传感器s7,所述微处理器分别与溶氧传感器s1、水ph值传感器s2、重金属离子传感器s3、氨氮传感器s4、水深传感器s5、温度传感器s6、湿度传感器s7、gps模块、第一无线通信模块电连接。
7.在本方案中,用户通过无人机将监测装置投放到需要监测的内陆湖水域,监测装置通过浮台浮在水上,监测装置实时采集所在水域的数据并判断所在水域的生态环境状态是否健康,并将采集的数据及判断结果通过第一无线通信模块无线发送到用户的智能终端。监测装置通过gps模块定位自身当前的位置,并将自身当前的位置无线发送到用户的智能终端,便于用户掌握监测装置的位置。
8.作为优选,所述浮台顶面设有四个围成方形的凸台,所述凸台顶部设有铁块,所述无人机包括机体,所述机体上设有控制器和第二无线通信模块,所述机体底部设有货舱,所述货舱底部开口,所述开口处设有对开门以及驱动对开门打开/闭合的驱动机构,所述货舱内设有四个与浮台上四个铁块位置对应的对接杆,所述对接杆底部设有电磁铁,所述货舱
内还设有用于带动对接杆上下升降的升降器,所述对接杆可在升降器带动下伸出/缩回货舱,所述货舱底部还设有摄像头,所述控制器分别与第二无线通信模块、驱动机构、电磁铁、升降器、摄像头电连接。
9.无人机投放监测装置时,先飞到监测装置上方,对开门打开,升降器带动四个对接杆下降伸出货舱,无人机调整位置直到四个电磁铁对准浮台上的四个铁块,启动电磁铁,每个电磁铁吸住对应的铁块,升降器带动四个对接杆上升将监测装置拉入货舱,对开门关闭,无人机飞到指定需要监测的水域,对开门打开,升降器带动四个对接杆下降伸出货舱,将监测装置放入水域的水中,关闭电磁铁,完成监测装置的投放。摄像头采集无人机下方图像,便于对接铁块、投放监测装置。无人机还能够将水域内损坏的监测装置通过上述方式回收。
10.本发明的一种内陆湖水域环境监测方法,用于上述的一种内陆湖水域环境监测系统,包括以下步骤:
11.s1:微处理器对溶氧传感器s1输出的检测数据ds1(t)、水ph值传感器s2输出的检测数据ds2(t)、重金属离子传感器s3输出的检测数据ds3(t)、氨氮传感器s4输出的检测数据ds4(t)、水深传感器s5输出的检测数据ds5(t)、温度传感器s6输出的检测数据ds6(t)、湿度传感器s7输出的检测数据ds7(t)分别进行处理得到对应的调整数据v
s1
(t)、v
s2
(t)、v
s3
(t)、v
s4
(t)、v
s5
(t)、v
s6
(t)、v
s7
(t),t为时间;
12.s2:微处理器每隔n秒计算一次表征生态环境质量的评价指数p,当a≤p≤b时,判断生态环境健康,当c≤p<a或者b<p≤d时,判断生态环境亚健康,当p<c或者p>d时,c<a<b<d,判断生态环境不健康。
13.作为优选,所述微处理器每隔n秒计算一次表征生态环境质量的评价指数p的方法包括以下步骤:
14.n1:微处理器计算n秒内每个时刻t的生态环境质量评价参数k(t),方法如下:
15.将调整数据v
s1
(t)、v
s2
(t)、v
s3
(t)、v
s4
(t)、v
s5
(t)、v
s6
(t)、v
s7
(t)分别进行归一化处理,归一化到[1,10]区间内,得到对应的归一化数据l
s1
(t)、l
s2
(t)、l
s3
(t)、l
s4
(t)、l
s5
(t)、l
s6
(t)、l
s7
(t),
[0016][0017]
其中,a1、a2、a3、a4、a5、a6、a7为调整系数;
[0018]
n2:将n秒内每个时刻t的生态环境质量评价参数k(t)输入非线性信号分析系统g(t):
[0019][0020][0021]
找到g(t)曲线的特征峰值gm,评价指数p=gm。
[0022]
作为优选,所述微处理器对传感器si的检测数据d
si
(t)进行处理,得到调整数据v
si
(t)的方法包括以下步骤,i=1-7:
[0023]
微处理器计算t-δt时刻至t时刻检测数据d
si
(t)的最大值dmax
si
和最小值dmin
si
,
调整数据
[0024]
本发明的有益效果是:通过无人机投放监测装置,用户能够根据需要监测指定的水域,监测灵活,监测装置能够实时监测所在水域数据并判断所在水域当前的生态环境健康状态,提高了监测效率。
附图说明
[0025]
图1是监测装置的电路原理连接框图;
[0026]
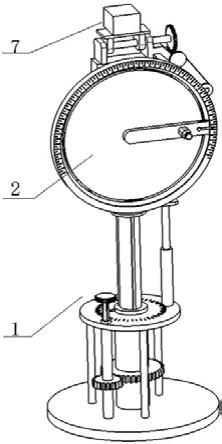
图2是监测装置的俯视图;
[0027]
图3是无人机的货舱的结构示意图。
[0028]
图中:1、浮台,2、水上检测模块,3、微处理器,4、gps模块,5、第一无线通信模块,6、凸台,7、铁块,8、货舱,9、对开门,10、对接杆,11、电磁铁,12、升降器,13、摄像头。
具体实施方式
[0029]
下面通过实施例,并结合附图,对本发明的技术方案作进一步具体的说明。
[0030]
实施例:本实施例的一种内陆湖水域环境监测系统,如图1、图2、图3所示,包括监测装置以及用于运送监测装置的无人机,监测装置包括浮台1,浮台1下方设有伸入水下的水下检测模块,水下检测模块包括用于检测内陆湖水域水体溶氧量的溶氧传感器s1、用于检测内陆湖水域水体ph值的水ph值传感器s2、用于检测内陆湖水域水体重金属离子浓度的重金属离子传感器s3、用于检测内陆湖水域水体氨氮含量的氨氮传感器s4、用于检测内陆湖水域水深的水深传感器s5,浮台1上方设有水上检测模块2,水上检测模块2包括微处理器3、gps模块4、第一无线通信模块5、用于检测内陆湖气温的温度传感器s6、用于检测内陆湖空气湿度的湿度传感器s7,微处理器3分别与溶氧传感器s1、水ph值传感器s2、重金属离子传感器s3、氨氮传感器s4、水深传感器s5、温度传感器s6、湿度传感器s7、gps模块4、第一无线通信模块5电连接。
[0031]
浮台1顶面设有四个围成方形的凸台6,凸台6顶部设有铁块7,无人机包括机体,机体上设有控制器和第二无线通信模块,机体底部设有货舱8,货舱8底部开口,开口处设有对开门9以及驱动对开门9打开/闭合的驱动机构,货舱8内设有四个与浮台1上四个铁块7位置对应的对接杆10,对接杆10底部设有电磁铁11,货舱8内还设有用于带动对接杆10上下升降的升降器12,对接杆10可在升降器12带动下伸出/缩回货舱8,货舱8底部还设有摄像头13,控制器分别与第二无线通信模块、驱动机构、电磁铁11、升降器12、摄像头13电连接。
[0032]
在本方案中,用户通过无人机将监测装置投放到需要监测的内陆湖水域,监测装置通过浮台浮在水上,监测装置实时采集所在水域的数据并判断所在水域的生态环境状态是否健康,并将采集的数据及判断结果通过第一无线通信模块无线发送到用户的智能终端。监测装置通过gps模块定位自身当前的位置,并将自身当前的位置无线发送到用户的智能终端,便于用户掌握监测装置的位置。
[0033]
无人机投放监测装置时,先飞到监测装置上方,对开门打开,升降器带动四个对接杆下降伸出货舱,无人机调整位置直到四个电磁铁对准浮台上的四个铁块,启动电磁铁,每个电磁铁吸住对应的铁块,升降器带动四个对接杆上升将监测装置拉入货舱,对开门关闭,
无人机飞到指定需要监测的水域,对开门打开,升降器带动四个对接杆下降伸出货舱,将监测装置放入水域的水中,关闭电磁铁,完成监测装置的投放。摄像头采集无人机下方图像,便于对接铁块、投放监测装置。无人机还能够将水域内损坏的监测装置通过上述方式回收。
[0034]
本实施例的一种内陆湖水域环境监测方法,用于上述的一种内陆湖水域环境监测系统,包括以下步骤:
[0035]
s1:微处理器对溶氧传感器s1输出的检测数据d
s1
(t)、水ph值传感器s2输出的检测数据d
s2
(t)、重金属离子传感器s3输出的检测数据d
s3
(t)、氨氮传感器s4输出的检测数据d
s4
(t)、水深传感器s5输出的检测数据d
s5
(t)、温度传感器s6输出的检测数据d
s6
(t)、湿度传感器s7输出的检测数据d
s7
(t)分别进行处理得到对应的调整数据v
s1
(t)、v
s2
(t)、v
s3
(t)、v
s4
(t)、v
s5
(t)、v
s6
(t)、v
s7
(t),t为时间;
[0036]
s2:微处理器每隔n秒计算一次表征生态环境质量的评价指数p,当a≤p≤b时,判断生态环境健康,当c≤p<a或者b<p≤d时,判断生态环境亚健康,当p<c或者p>d时,c<a<b<d,判断生态环境不健康。
[0037]
作为优选,所述微处理器每隔n秒计算一次表征生态环境质量的评价指数p的方法包括以下步骤:
[0038]
n1:微处理器计算n秒内每个时刻t的生态环境质量评价参数k(t),方法如下:
[0039]
将调整数据v
s1
(t)、v
s2
(t)、v
s3
(t)、v
s4
(t)、v
s5
(t)、v
s6
(t)、v
s7
(t)分别进行归一化处理,归一化到[1,10]区间内,得到对应的归一化数据l
s1
(t)、l
s2
(t)、l
s3
(t)、l
s4
(t)、l
s5
(t)、l
s6
(t)、l
s7
(t),
[0040][0041]
其中,a1、a2、a3、a4、a5、a6、a7为调整系数;
[0042]
n2:将n秒内每个时刻t的生态环境质量评价参数k(t)输入非线性信号分析系统g(t):
[0043][0044][0045]
找到g(t)曲线的特征峰值gm,评价指数p=gm。
[0046]
作为优选,所述微处理器对传感器si的检测数据d
si
(t)进行处理,得到调整数据v
si
(t)的方法包括以下步骤,i=1-7:
[0047]
微处理器计算t-δt时刻至t时刻检测数据d
si
(t)的最大值dmax
si
和最小值dmin
si
,调整数据
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。