1.本实用新型涉及一种用于膝关节假体放置的切割装置。本实用新型还涉及一种包括这种切割装置的切割辅助装置。本实用新型还涉及一种辅助膝关节假体的安装并且使用该装置的方法。本实用新型最后涉及一种实现该方法的辅助系统,用于实现该方法的计算机程序产品,以及包括该方法的步骤的记录介质。
背景技术:
2.为了将膝关节假体放置在对象上,必须首先在胫骨和股骨的靠近膝盖的端部处切断胫骨和股骨。
3.骨骼的切割很精巧,操作员必须小心地取出尽可能少的骨骼,但必须去除足够的骨骼以提供平坦的表面和足够的空间来放置假体部件。另外,切口的角度很关键。缺乏操作精确度会导致对象遭受疼痛,不稳定,过早磨损或脱臼的重大风险。为此,提供了使用许多辅助工具的非常复杂的装置:这些系统的缺点是价格昂贵且无法广泛使用。
技术实现要素:
4.本实用新型的目的是提供一种装置和方法,用于协助操作者确定用于放置膝关节假体的胫骨或股骨的的切割平面。具体地,本实用新型的目的是通过优化精确度来简化切割平面的确定。
5.根据第一方面,本实用新型涉及一种用于膝关节假体放置的切割装置,其包括支架和被可移动地安装在该支架上的切割引导件,其中支架包括用于其位置的第一标记和用于将其附接至骨骼的支架固定元件,并且其中切割引导件包括用于其位置的第二标记和定义被适配用于引导切割工具的切割平面的槽。
6.在一个实施例中,该切割引导件根据至少一个平移自由度被可移动地安装在支架上。
7.在一个实施例中,该切割引导件根据至少两个旋转自由度被可移动地安装在支架上。
8.在一个实施例中,该切割引导件经由关节连接组件被可移动地安装在支架上,允许切割引导件相对于支架移动。
9.在一个实施例中,第一标记和第二标记包括至少包括一个图案的矩形平面。
10.在一个实施例中,切割引导件包括用于附接至骨骼的切割引导件固定元件。
11.根据第二方面,本实用新型涉及一种用于放置膝关节假体的切割辅助装置,其包括至少一个根据本实用新型的第一方面的切割装置和至少一个点勘测工具,该至少一个点勘测工具包括放置点和用于定位该放置点的第三标记。
12.在一个实施例中,该辅助装置包括根据本实用新型的第一方面的被设计为用于切割胫骨的第一切割装置和根据本实用新型的第一方面的被设计为用于切割股骨的第二切
割装置。
13.根据第二方面,本实用新型涉及一种用于辅助膝关节假体的放置的方法。
14.该方法包括:
[0015]-用于放置根据本实用新型的第一方面所述的切割装置的第一阶段,其包括可相对于该装置的支架根据三个自由度移动的切割引导件,
[0016]-用于相对于支架放置切割引导件的第二阶段,其包括
[0017]
·
通过支架的第一标记的单个摄像头进行可视化,并且形成相对于第一标记定义的参考标记的可视化步骤,
[0018]
·
查看第一标记和第二标记的步骤,以及
[0019]
·
传输至操作员并且向操作员指示切割引导件和/或其切割平面相对于参考标记的相对三维定位的步骤。
[0020]
在一个实施例中,参考标记包括两个参考轴线。
[0021]
在一个实施例中,形成该参考标记包括以下步骤:
[0022]-产生参考点;
[0023]-相对于第一标记形成穿过参考点和预定点的第一参考轴线;
[0024]-形成第二参考轴线,该第二参考轴线通过将支架的已知轴投影到垂直于第一参考轴线的平面上而确定。
[0025]
在一个实施例中,该方法适于切割胫骨,并且参考点位于胫骨的机械轴上。在一个实施例中,参考点的产生是通过以下步骤执行的:相对于第一标记观察点勘测工具的第三标记来定位该参考点。
[0026]
在一个实施例中,该方法适于切割股骨的骨骼部分,并且参考点被放置在股骨的机械轴上。在一个实施例中,参考点的生成包括移动患者的腿以确定该腿的旋转中心的子步骤以及在腿和相对于患者骨盆固定的第三标记的运动期间查看第一标记的多个图像的子步骤。
[0027]
根据第四方面,本实用新型涉及一种用于辅助假体的放置的系统。该系统包括根据本实用新型的第一方面的切割装置,可移动的单目摄像头,特别是被安装在一副眼镜上或被安装在便携式物体例如电话上的可移动的单目摄像头,显示装置以及用于实现根据本实用新型的第三方面所述的辅助方法的装置。
[0028]
在一个实施例中,查看步骤通过该摄像头来执行,并且传输步骤通过该显示装置来执行。
[0029]
根据第五方面,本实用新型涉及一种计算机程序产品,其包括被存储在计算机可读介质上的用于当该程序在计算机上运行时实现根据本实用新型第三方面所述的方法的步骤的程序代码指令,或涉及一种可从通信网络下载的和/ 或被存储在计算机可读介质和/或计算机可执行数据载体上的计算机程序产品,其包括当程序由计算机执行时使计算机实现根据本实用新型的第三方面所述的方法的指令。
[0030]
根据第六方面,本实用新型涉及一种计算机可读的数据存储介质,其上记录有计算机程序,该计算机程序包括用于实现根据本实用新型的第三方面所述的方法的程序代码指令,或涉及一种计算机可读存储介质,其包括当由计算机执行时使后者实现根据本实用新型的第三方面所述的方法的指令。
附图说明
[0031]
附图通过示例的方式表示根据本实用新型的切割装置的实施例和根据本实用新型的系统的实施例。
[0032]
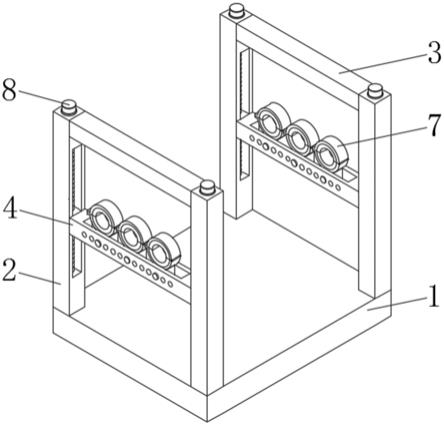
图1表示根据本实用新型的一个实施例的切割装置的透视图;
[0033]
图2表示根据本实用新型的一个实施例的切割装置的前视图;
[0034]
图3表示切割装置的前视图,其中切割引导件已经由用于驱动关节连接组件的第一装置移动;
[0035]
图4表示根据本实用新型的一个实施例的切割装置的侧视图;
[0036]
图5表示根据本实用新型的一个实施例的装置的侧视图,其中切割引导件已经由用于驱动关节连接组件的第二装置移动;
[0037]
图6表示用于实现根据本实用新型的一个实施例的方法的指针的透视图;
[0038]
图7表示用于实现根据本实用新型的一个实施例的方法的夹持件的透视图;
[0039]
图8表示图7的夹持件的透明视图;
[0040]
图9表示根据本实用新型的一个实施例的切割引导件的透视图;
[0041]
图10表示根据本实用新型的一个实施例的辅助系统的示意图;
[0042]
图11表示根据本实用新型的一个实施例的由辅助系统的计算机执行的步骤的示意图;
[0043]
图12表示胫骨的轮廓图,根据本实用新型的一个实施例的切割装置附接至该胫骨。
具体实施方式
[0044]
下面参照图1描述根据本实用新型的一个实施例的用于放置膝关节假体的切割装置1的示例。
[0045]
切割装置1包括定位框架3和切割引导件2。定位框架3允许将装置1固定到待切割的骨骼上,可移动的切割引导件2包括槽21,并且允许切割装置被引导通过其槽21以执行骨骼切割。
[0046]
定位框架3包括支架4和关节连接组件5。支架4被设计成安装在待切割的骨骼上。切割引导件2可移动地安装在该支架4上。关节连接组件5被设计成可相对于支架4移动并且支持切割引导件2。
[0047]
支架4包括附接装置41,该附接装置41提供稳定的附接,以使支架4和待切割的骨骼之间没有自由度。
[0048]
如图1所示,附接装置41可以包括至少第一孔42,第一孔42被设计成接收第一螺纹销或钉。支架4在附接点处抵靠待切割的骨骼放置,并且第一螺纹销或钉穿过支架4的第一孔42插入骨骼中。
[0049]
有利地,支架4允许将定位框架3固定在下面描述的切割引导件2的切割平面附近。
[0050]
在一个实施例中,支架4包括至少一个第二孔44,该至少一个第二孔被设计为接收用于将支架4固定到骨骼的第二螺纹销或钉。该至少一个第二孔 44的纵向轴线倾斜于第一孔42的纵向轴线。换句话说,第二孔44被设计成使得被接收在其中的螺纹销或钉相对于第一螺钉的方向处于倾斜方向。在倾斜方向上的该至少一个第二孔44,可以有利地阻止支架4
一旦被安装在待切割的骨骼上后的分离和/或游隙。第二孔44的直径可以小于第一孔42的直径。
[0051]
支架4被机械地连接到定位框架3的关节连接组件5。支架4和关节连接组件5之间的机械连接包括至少一个自由度。优选地,支架4和关节连接组件 5之间的机械连接包括至少一个旋转自由度,优选地两个旋转自由度和一个平移自由度。
[0052]
优选地,支架4包括杆45。杆45包括被设计成接收关节连接组件5的纵向延伸部分。杆45可以包括与关节连接组件5形成滑动连接的凹槽。优选地,杆45被设计成接收关节连接组件5的滑架531,使得滑架531能够沿着杆45 的纵轴滑动。
[0053]
有利地,切割引导件2相对于杆4的移动性允许控制切割引导件2相对于相关骨骼的运动,以最佳地定位切割引导件2以切割骨骼。
[0054]
在一个实施例中,定位框架3包括至少一个用于控制与支架关节连接的组件的装置。该控制装置允许关节连接组件5相对于支架4根据至少一个自由度移动。
[0055]
更一般地,关节连接组件5和支架4包括至少两个或多个控制装置,每个控制装置允许根据自由度来控制关节连接组件5或切割引导件2相对于支架4 的移动性。
[0056]
该至少一个控制装置根据至少一个旋转或平移自由度来授权关节连接组件5相对于支架4的位移。
[0057]
如图1至图5所示,关节连接组件5包括授权关节连接组件沿第一轴线b 旋转的第一控制装置51,授权关节连接组件沿第二轴线c旋转的第二控制装置52,以及授权关节连接组件5相对于支架沿第三轴线a移动的第三控制装置53。
[0058]
该控制装置可以包括锁定机构和/或齿条。
[0059]
如在图2和图3中更具体地示出的,第一控制装置51包括被连接到螺钉 514的驱动轮510。可移动元件513被布置在该螺钉514的螺纹上。因此,当螺钉514旋转时,可移动元件513根据螺钉514的旋转方向移动到螺钉514的一侧或另一侧。可移动元件513的位移导致关节连接组件5的图3所示的沿b 轴的旋转。
[0060]
优选地,可移动元件513沿着螺钉514的位移通过可移动元件513和驱动元件512之间的滑动连接511被转换成切割引导件2的驱动元件512的旋转位移。该驱动元件512经由枢轴连接件516被机械地连接到切割引导件2,其驱动其沿着穿过枢轴连接件516的第一轴线b(图4中所示)旋转。
[0061]
优选地,第一控制装置51包括螺钉514的驱动轮510,非常优选地,螺钉514的两个驱动轮510,在螺钉的每一侧上一个驱动轮。
[0062]
如在图4和图5中更具体地示出的,第二控制装置52包括驱动与该驱动轮520集成的螺钉521的驱动轮520。螺钉521的远端522与滑架531接触。该端部522优选地是球形的。该球形旨在确保螺钉522的端部与滑架45之间的点连接。
[0063]
第二控制装置52包括倾斜枢轴524。倾斜枢轴524包括螺纹525。螺钉 521被拧入螺纹525中。更具体地,螺纹525可以包括螺纹穿孔。因此,螺钉 521的旋转引起螺纹525沿着螺钉521的纵向运动。倾斜枢轴524还包括到切割引导件2的连接,使得倾斜枢轴524的旋转引起切割引导件2的旋转。倾斜枢轴524还包括到支架4或到滑架531的枢轴连接件523。该枢轴连接件523 优选地被布置在螺纹525与到切割引导件的连接件之间。螺纹525沿着螺钉 521的纵向位移因此引起绕倾斜枢轴524的枢轴523的旋转运动,并且因此引起切割引导件2沿
图2所示的第二轴线c的旋转运动。该第二轴线穿过枢轴 523。
[0064]
第一控制装置51和第二控制装置52优选地被布置为使得第一轴线b和第二轴线c在枢轴点523处垂直和/或交叉。
[0065]
第三控制装置53包括在支架4的杆45和关节连接组件5的滑架531之间的滑动连接件。该滑动连接件可以包括用于停止该平移的装置。例如,被布置在杆45的端部的止动螺钉532。
[0066]
止动螺钉532拧在杆45的端部上,以便沿着平移轴线a移动。然后,止动螺钉532将滑架531的平移锁定在所需高度或位置的方向上。在未示出的实施例中,第三控制装置53可以包括第二止动装置,用于阻止滑架531在与止动螺钉532相反的方向上平移。
[0067]
该滑动连接优选地允许切割引导件2沿着平行于第一孔42的纵向轴线的轴线平移运动。
[0068]
在一个未示出的实施例中,定位框架3还可以包括形成机架的连接元件。机架包括在关节连接组件和支架之间的滑动连接件。滑动连接件包括第一螺纹臂和与第一臂滑动连接的第二臂。机架包括在第一臂和第二臂之间的齿轮,该齿轮围绕第一螺纹臂的旋转运动被转换为沿着该第一臂的线性运动,齿轮的该线性运动驱动第二臂。机架也能够被设计成使得齿轮的一整圈对应于预定距离的线性运动。
[0069]
因此,控制切割引导件2相对于支架4的移动性,以允许操作员以精确且稳定的方式将切割引导件2定位在期望的位置和/或方向上。
[0070]
优选地,关节连接组件5和支架4是可移除的。实际上,一旦将切割引导件2附接到骨骼上,就能够将关节连接组件5从支架4上移除。
[0071]
如图9所示,切割引导件2包括槽21。槽21被设计成与待切割的骨骼接触。它形成通孔,该通孔被设计成允许切割工具穿过切割引导件2以进行骨骼切割。因此,槽21定义适于引导切削工具穿过该槽21的切割平面。在继续的描述中,穿过该槽的平面将被称为“切割平面”。
[0072]
关节连接组件5包括至少一个与切割引导件2相连接的连接元件54,并且切割引导件2包括与关节连接组件5的该至少一个连接元件54互补的至少一个连接元件25,例如,凸/凹装置。这种固定连接件允许切割引导件由关节连接组件5驱动。
[0073]
优选地,这个连接件是可移动的,以便在将切割引导件2附接到相关的骨骼上时从切割引导件2上移除关节连接组件5。关节连接组件5可以包括夹持键515。该夹持键515与螺钉(未示出)成一体,该螺钉穿过支架4的杆45 延伸到连接元件54或切割引导件2。该夹持键515的目的是将切割引导件2 固定到其连接元件54上。
[0074]
因此,操作员可以在进行切割骨骼之前,通过旋开夹持键515,能够从骨骼上移除定位框架3(支架4和关节连接组件5)。这样,用于将定位框架3固定到骨骼上的销或钉被移除并且不会干扰切割。
[0075]
在一个实施例中,切割引导件2包括至少一个切割引导件固定元件22。切割引导件的切割引导件固定元件22允许将切割引导件2固定到待切割的骨骼上。以这种方式,一旦操作者经由关节连接组件将切割引导件2布置到期望位置,操作者就可以在进行骨切割之前将切割引导件2固定到骨骼上。
[0076]
在一个实施例中,切割引导件2能够从装置中移除。
[0077]
切割引导件2的切割引导件固定元件22可以包括被设计成放置在骨骼表面上的表面和被设计成以与支架的定位框架相同的方式接收第一螺钉的第一孔。优选地,切割引导件附接元件被布置成使得螺钉不干扰骨骼切割。
[0078]
优选地,切割引导件包括至少两个切割引导件固定元件,每个切割引导件固定元件包括用于螺钉穿过以刺入待切割的骨骼的孔。每个孔可以在不同的方向上延伸以阻止切割引导件的返回。
[0079]
在一个实施例中,切割引导件2适于待切割的骨骼的形态。在适合于切割胫骨的切割引导件的情况下,切割引导件可以是不对称的。
[0080]
切割引导件还可以包括至少一个用于附接物理探针的装置24。
[0081]
另外,支架4至少包括用于其位置的第一位置标记43,并且切割引导件2 包括用于其位置的第二位置标记23。
[0082]
第一标记43和第二标记23被设计和布置成由光学传感器,例如摄像头机定位。
[0083]
摄像头通过位置标记获得的图像允许通过算法检测其位置和方向。每个标记都有预定义的大小、形状和图案。该算法知道标记的形状、大小,可选地知道其图案。为此,该算法可访问电子存储器,在该电子存储器上存储了代表其所分析的元素的几何形状的数字数据。特别地,通过将它们与图像上标记的形状、大小和图案进行比较,该算法能够推断出其位置和方向。例如,如果标记包括正方形的表面图案并且这个相同的图案在图像上呈现为梯形,则梯形的角度允许算法推断出该表面的方向。此外,正方形的两个相对边之间的像素数量允许算法推断出标记和摄像头之间的距离。每个标记能够包括不同的图案,因此算法通过识别图案能够将工具与位置标记相关联,例如,第二位置标记代表切割引导件。由于位置标记没有任何自由度地附接在工具上,因此能够将获得的第一标记和第二标记的图像用于确定第一标记和第二标记的位置和方向,从而确定支架和切割引导件的位置和方向。
[0084]
实际上,使用这种类型的标记可以针对每个图像采集改善其在一个或多个摄像机的参考框架中的位置和三维定向。这种标记能够具有不同的尺寸和几何形状。
[0085]
图案可以是三维的或二维的。优选地,标记包括适合于例如通过胶合接收包括图案的标签的平坦表面。在另一示例中,图案被丝网印刷在该平坦表面上。图案可以是黑色和白色,但是图案也可以是彩色。
[0086]
这种图案与红外手术导航系统通常使用的图案不同,因为它是可重复使用的。实际上,可以用高压灭菌器消毒。这样允许节省耗材。
[0087]
图案可以具有简单或复杂的几何形状。这样可以更轻松地识别标记。这也允许通过处理来自一个或多个摄像机的图像来改进对标记位置和方向的估计。
[0088]
实际上,本文中所述的根据本实用新型的实施例的标记具有包括至少一个图案的平面矩形表面。
[0089]
因此,如上所述,第一标记和第二标记的特定形状使得可以分别确定支架和切割引导件的位置和定向。这简单地构成了用于定位和定向第一标记和第二标记,因而定位和定向支架和切割引导件的装置。
[0090]
标记的这种特殊形状的优点还在于,能够利用单个光学传感器,例如摄像机来估计支架和切割引导件的位置和定向。
[0091]
另一个优点是,待处理的图像能够通过单个的单目光学传感器,优选地可见域中
的光学传感器,特别是摄像机获得。所谓“可见域中的光学传感器”,是指光学传感器记录人眼可见的图像,包括所谓的“黑白”摄像机和所谓的“彩色”摄像机。与通常由外科手术导航这种使用的由红外摄像头组成的系统相比,这使选择更经济的摄像头成为可能。
[0092]
光学传感器能够被集成在不同的装置中,例如电话,平板电脑,连接的眼镜或集成了一个或多个摄像机的任何其他系统。该组手术导航算法能够在嵌入式平台或远程计算机上执行。
[0093]
但是该至少一个图案也能够通过用于定位标记的形状的单目光学传感器来定位。通过根据类似于标记的形状的图像的处理方法来处理图案的图像,也能够确定第一标记和第二标记的位置和方向,以及因此分别是支架和切割引导件的位置和方向。因此,这简单地构成了定位和定向第一标记和第二标记,从而定位和定向支架和切割引导件的互补装置。
[0094]
这一个或多个图案的优点在于,通过两种不同的方式来估计第一标记和第二标记的位置和方向,从而估计支架和切割引导件的位置和方向,这进一步提高了第一标记和第二标记定位和定向的准确性,因此提高了支架和切割导板的定位和定向的准确性。
[0095]
因此,利用在可见域中拍摄的单个摄像头,获得了第一标记和第二标记的更好的定位和定向,从而获得了支架和切割引导件的更好定位和定向。
[0096]
本实用新型还涉及一种用于安装膝关节假体的切割辅助装置,其特征在于,其包括至少一个如上所述的切割装置和至少一个如下所述的点勘测工具,该工具包括用于其位置的定位点和第三标记。该切割辅助装置可以包括被设计用于切割胫骨的第一切割装置和被设计用于切割股骨的第二切割装置。辅助装置还包括至少一个用于定位特定位置,特别是解剖位置的附加工具,我们将其称为“点勘测工具”。该点勘测工具还包括用于其位置的第三标记,类似于第一标记和/或第二标记。第三标记包括特定形状和独特图案,用于通过算法在图像中进行识别。
[0097]
在图6所示的第一实施例中,点查找工具是指针6。
[0098]
指针6包括轴61,接触点62和第三位置标记63。该算法使用代表指针6 的几何形状的数据,以便知道接触点62相对于第三位置标记63的位置。这个数据能够被存储在辅助系统的电子存储器中,这将在后面描述。因此,为了在给定地标中生成点,使接触点62指向待记录的点,然后拍摄第三标记63和与所形成的该地标相关联的另一标记的图像就足够了。
[0099]
在图7和图8所示的第二实施例中,点勘测工具是夹持件7。
[0100]
夹持件7包括基部70和可相对于基部70移动的两个臂71。夹持件7的每个臂71可以在其端部包括用于定位的垫72。该垫72可以包括与夹持件的臂71的枢转自由度。在该实施例中,垫72优选地被设计成接收踝关节。
[0101]
夹持件7的基部70包括第三位置标记73。该标记73与基部70成为一体。
[0102]
两个臂71通过枢轴连接件74彼此连接。该枢轴连接件包括被设计成在中心凹槽76内滑动的中心小齿轮75。
[0103]
每个臂71还包括被设计成与基部70的侧面小齿轮78配合的侧面凹槽。当臂71相对于基部70移动时,侧面小齿轮78沿着侧面凹槽77滑动。
[0104]
侧面凹槽77和中央凹槽76被设计成使得在夹持件7的臂71的各种运动期间,垫72根据平行于中央凹槽76的纵向轴线的轴线x的突出是恒定的。
[0105]
另外,中心枢轴连接件74使第二臂在第一臂上施加类似的运动。因此,位于两个垫
72之间的段的中间的点相对于基部和相对于夹持件的位置标记总是位于相同的位置。
[0106]
当臂71移动以缩短两个垫72之间的距离时,臂71围绕枢轴连接件74的旋转运动导致侧面小齿轮78沿着侧面凹槽77移动,而中心小齿轮75沿着线性中央凹槽76线性移动,使得该两个垫之间的线段中间的点o相对于基部70 固定,因此相对于第三标记73固定。
[0107]
优选地,夹持件7包括允许中心小齿轮75被保持在中心凹槽76的两个端部中的一个上的,非常优选地被保持在最靠近凸耳的末端上的返回元件(未示出)。该元件能够是被布置在凹槽中的复位弹簧或橡胶带。这个返回元件允许夹持件的端部朝向彼此返回。
[0108]
该算法使用相对于第三位置标记73的两个垫72之间的线段中间的点o 的位置数据。因此,为了在给定参考框架中产生点o,使定位垫72并且拍摄第三标记73和与该给定参考框架相关联的另一标记的图像就足够了。
[0109]
在未示出的第三实施例中,点勘测工具包括被附接到平坦表面的标记。
[0110]
该算法使用来自勘测工具的结构的数据,以便知道该点相对于第三位置标记在该平面表面上的位置。
[0111]
因此,本实用新型涉及一种辅助装置,其包括如上所述的切割装置和如上所述的点勘测工具。
[0112]
为了在算法的给定参考框架中生成平面,因此将勘测工具的平坦表面放置在待记录的平面上,然后拍摄第三标记和与该给定参考框架相关联的另一个标记就足够了。
[0113]
下面参照图10描述包括切割装置1的辅助系统100的示例。
[0114]
本实用新型涉及一种辅助系统100,其包括如上所述的切割装置1,光学捕获装置200,特别是摄像机,以及信息传输装置400。
[0115]
有利地,该系统使得可以通过捕获位置标记来确定切割平面相对于支架的位置或点勘测工具的待勘测点o,62的位置。
[0116]
信息传输装置400被用于将有关切割平面的位置和方向的信息传输给操作者。
[0117]
优选地,光学捕获装置200是视频捕获装置,从而能够实时地监视切割引导件的位置。光学捕获装置可以是摄像机或静态摄像机。
[0118]
在一个实施例中,辅助系统100仅包括一个单目捕获装置,优选地是可见域中的捕获装置。“可见域捕获装置”,是指光学捕获装置记录人眼可见的图像,包括所谓的“黑白”摄像机和所谓的“彩色”摄像机。
[0119]
辅助系统100还包括信息传输装置400。该信息传输装置400可以是视觉或听觉信息传输装置。
[0120]
信息传输装置400可以是用于将来自由光学捕获装置200拍摄的图像的切割平面的位置和/或方向信息传达给操作者的任何装置。
[0121]
信息传输装置400可以是显示装置,并且可以包括屏幕,图像投影装置,扬声器,音频耳机。
[0122]
优选地,信息传输装置400包括操作者要戴的一副眼镜或单片眼镜。该副眼镜或单片眼镜可以包括光学捕获装置200,例如以集成在框架中或手臂上的单个摄像头的形式,并且包括信息传输装置400,例如以在这副眼镜的镜片上将信息投射到操作员的视野中的装置的形式。
[0123]
辅助系统100还包括被连接到数据存储介质301的计算机300,该计算机 300包括
用于辅助假体安装的算法。计算机300被连接到光学捕获装置以接收所拍摄的图像,并且被连接到信息传输装置以控制该信息传输装置。
[0124]
辅助系统100还可以包括用于操作员与软件进行交互的交互装置250。交互装置250可以位于这副眼镜上或在单片眼镜上。这个交互装置可以包括麦克风,控制按钮,触觉表面,眼睛跟踪摄像头。
[0125]
交互装置250可以包括指针6。在一个实施例中,这副眼镜或单片眼镜显示包括图标或象形图的图形界面。使用者能够操纵这些图标或象形图,从而通过指示装置与软件进行交互。指示装置可以包括指针6,鼠标等。使用者还能够通过手势识别系统或加速度计与图形界面进行交互。
[0126]
优选地,辅助系统通过语音命令或身体运动,例如头部运动来激活。一旦激活系统,这副眼镜或单片眼镜就会显示包含图标或象形图的图形界面。使用者能够操纵这些图标或象形图,从而通过指示装置,例如上述的指针或通过手势识别系统与辅助系统软件进行交互。
[0127]
图形界面可以包括虚拟交互按钮。优选地,图形界面包括玫瑰花结,在其上围绕该玫瑰花结的中心表示虚拟交互按钮。使用者能够操纵玫瑰花结的按钮,从而通过指示装置,例如上述指针,或通过手势识别系统与软件进行交互。
[0128]
本实用新型还涉及一种使用如上所述的切割装置1和/或辅助系统100来辅助膝关节假体的安装的方法。
[0129]
该方法旨在例如通过向操作者提供有关装置的切割平面相对于所形成的参考标记的位置和/或方向的信息来帮助他们。注意,本实用新型的辅助方法本身就涉及外科手术治疗的上游步骤。它仅涉及未来手术中辅助工具的正确定位。因此,这个方法专门地与装置的正确使用相关联,而不会阻止外科医生在不使用该装置的情况下以不同的方式进行外科治疗。
[0130]
该方法包括定位如上所述的定位切割装置1的定位框架3的第一步。这个步骤包括经由该至少一个固定元件将支架4附接至待切割的骨骼,以及将切割引导件2附接至关节连接组件5。
[0131]
该方法然后包括在可见光中使用光学捕获装置200,例如单目摄像机,使得该摄像头能够检测支架的第一标记和切割引导件的第二标记。信息传输装置 400也被定位成使得它能够将信息传输给使用者。
[0132]
切割装置1抵着胫骨或股骨放置。切割装置可以被放置在膝关节表面上的前述骨骼中的任何一个上。
[0133]
将切割装置抵靠胫骨或股骨放置,使得切割平面允许切割厚度在2mm至 20mm之间,优选地在6mm至10mm之间。
[0134]
因此,支架被固定到骨骼,并且切割引导件相对于支架并且相对于该支架被固定到的骨骼保持可移动。
[0135]
该方法然后包括辅助相对于支架并且因此相对于骨骼定位切割引导件的第二阶段。
[0136]
为此目的,该方法包括通过光学捕获装置可视化第一标记43和第二标记 23的步骤。
[0137]
该方法能够实现用于识别由光学捕获装置所拍摄的图像中的标记的算法。由于标记的特定形状和/或附于标记上的独特图案,该算法能够定义该标记在三维空间中的位置和方向。
[0138]
从查看步骤,该方法然后包括地标形成步骤。
[0139]
所形成的地标是包括两个或三个正交参考轴线的地标。
[0140]
所形成的地标包括第一参考轴线,与第一参考轴线正交的第二参考轴线以及可选地与第一参考轴线和第二参考轴线正交的第三参考轴线。
[0141]
如图12所示,第一参考轴线n是待切割的骨骼的机械轴。机械轴是指所讨论的骨骼的机械力的支持轴线。机械轴不同于骨骼的沿着有关骨骼的骨干延伸的解剖轴或纵向轴线。
[0142]
通过定位第一点和第二点来形成第一参考轴线n。
[0143]
相对于切割装置的第一标记生成第一点的位置。实际上,切割装置的支架占据参考位置,该参考位置通过其第一标记可见。因此,该算法能够生成代表支架固定在骨骼上并且其位置相对于支架标记固定的第一点。第一点相对于支架是固定的。因此,支架被设计成使得当支架被附接到骨骼上时,第一点穿过待切割的骨骼的机械轴。
[0144]
对于胫骨,可以使用点勘测工具确定第二点的位置。如图12在胫骨10的示例中所示,第一点k由第一标记的位置和方向确定。
[0145]
胫骨10的机械轴穿过与相关腿的左踝和右踝的外点等距的点。外点是指距胫骨解剖轴最远的踝关节表面上的点。
[0146]
在一个实施例中,第二点m是通过优选地使用上述指针6来勘测患者的每个踝的外点而产生的。根据这两个点,算法生成第二个点m,作为与患者每个踝的外点等距离的点。
[0147]
在一个可替换实施例中,如上所述的夹持件7被用于确定第二点m。夹持件7的两个垫72被分别放置于每个踝的外点上。第二点m于是对应于与夹持件7的两个垫72等距的点o。这样的夹持件因此允许可靠地,容易地并且自动地在单个读数中从分别在两个容易定位的解剖区域上的两个横向支持件识别中心(或内部)解剖点。在所描述的实施例中,夹持件被设计成分别用作脚踝的每个踝上的两个支持件。当然,这种夹持件被可替换地用于定位许多其他解剖点。
[0148]
因此,本实用新型以使用者友好和可靠的方式为在体内定位解剖点的技术问题提供了一种解决方案。
[0149]
该解决方案基于夹持件,其特征在于两个关节连接臂71,每个关节连接臂包括允许在人体的解剖区域上定位的垫72。夹持件被配备有固定的标记73,该标记允许自动地确定其位置并推导出可从夹持件的两个垫72推导出的解剖学内部点。特别地,本实用新型涉及一种夹持件,该夹持件包括基部,各自包括垫的第一臂和第二臂,第一臂和第二臂通过可移动的关节连接件彼此连接,使得一个臂的运动引起可移动的关节连接件沿着基部中的凹槽移动,使得连接两个臂的部分的中部相对于基部不动。
[0150]
对于股骨,机械轴穿过股骨的股骨头。为了产生第二点,利用股骨头形成股骨的旋转中心来推导第二点的位置。
[0151]
第一步,使用者将位置标记放置在相对于患者骨盆的固定支持件上。优选地,位置标记被放置在患者的骨盆上,但是也可以被放置在患者躺在其上的桌子上或摄像头视场中
的另一固定支持件上。
[0152]
在第二步骤中,摄像头拍摄固定位置标记和第一位置标记的不同图像。在每个图像中,患者的膝盖被移动到不同的位置。
[0153]
在每个图像中,该算法通过确定第一位置标记43相对于固定位置标记的位置,在股骨的机械轴上生成并且记录第一点。
[0154]
接下来,算法计算包括一组机械轴点的球体。球体能够是经由统计方法尽可能接近所有点的球体。
[0155]
该算法最终将这个球体的中心确定为第二参考点。
[0156]
因此,根据第一位置标记的第二参考点的位置被存储在存储器中。
[0157]
然后,该算法相对于第一位置标记生成穿过第一点和第二点的第一参考轴线。
[0158]
第二参考轴线通过将支架4的已知轴线投影到垂直于第一参考轴线n的平面上来产生。第二参考轴线优选地穿过膝盖的中心或穿过第一点k。
[0159]
因此,第一参考轴线n和第二参考轴线根据第一参考标记43确定。因此,在摄像头从这个步骤所拍摄的每个图像上,该算法能够从第一参考标记所拍摄的图像生成由第一参考轴线和第二参考轴线定义的正交参考框架。
[0160]
切割平面与第一参考轴线的相交允许评估切割平面相对于待切割的骨骼的机械轴的高度。投影到第一轴线上的切割平面被用于确定切割厚度。为此,算法确定切割平面与第一参考轴线的交点和厚度参考点之间的距离。
[0161]
厚度参考点是位于膝盖关节表面上的点,最好是在关节处骨表面的末端。在股骨的示例中,该点位于突出的髁突的一个中的末端上,即髁的突出曲线的最远端上。在胫骨的示例中,该点是胫骨平台杯的底部的点或侧凸髁突的最远端的点。
[0162]
在第一实施例中,厚度参考点由点勘测工具生成。当摄像头捕获指针位置标记和第一位置标记的图像时,使用者将指针指向髁突的末端。因此,记录厚度参考点相对于第一标记的位置。
[0163]
在第二实施例中,切割引导件包括物理探针24。物理探针24被设计成使得其末端26能够被搁置在髁突末端上。例如,当关节连接组件5经由滑动连接件相对于支架4移动时,切割平面在机械轴n上的投影变化,直到探针的端部26到达髁突末端。如图4所示,探针可以包括两个末端26、27。探针被设计成使得第一端部可以搁置在凹入部分的末端上,而第二端可以搁置在凸出部分的末端上。
[0164]
切割引导件优选地被设计成使得切割平面与第一参考轴线的相交处与探针的该远端并从而与厚度参考点相距预定距离,优选地为约9mm。切割引导件可以包括用于使这个距离在6mm和10mm之间改变的装置。
[0165]
因此,标记是由第一位置标记形成的。
[0166]
一旦形成标记,该方法就确定切割平面相对于该形成的标记或参考标记的位置和方向。优选地,切割引导件的位置和方向由定位框架3的控制装置51、 52、53控制。
[0167]
该方法包括以下步骤:拍摄包括第一位置标记和切割引导件的第二位置标记的图像。
[0168]
根据这样的图像和两个标记的方向,这个步骤允许将切割平面定位在所形成的参考框架中。
[0169]
该算法识别第一标记并且推导参考标记。通过在同一图像中标识切割引导件的第二标记,确定了切割引导件或切割平面在参考框架中的位置和方向。
[0170]
因此,由于第一标记用作切割平面的位置和方向的参考标记,该方法有利地与移动的摄像头或移动的光学捕获装置兼容。
[0171]
一旦确定了参考标记,并且在该参考框架中确定了切割平面的位置和方向,该方法就产生切割引导平面相对于该参考标记的位置和/或方向的至少一个参数。
[0172]
该参数可以表示切割平面相对于参考标记的第一参考轴线和/或相对于第二参考轴线的角度。产生至少一个参数的步骤优选地由计算机实现。
[0173]
第一个生成的参数例如可以是角度或取决于切割平面和第二参考轴线之间的角度的值,代表内翻角/外翻角。
[0174]
第二个生成的参数可以是例如切割平面和第一参考轴线之间的角度或角度的函数,代表胫骨的膝盖关节面的后/前斜面或股骨的屈曲/拉伸参数。
[0175]
第三个生成的参数能够是切口厚度。切口的厚度由切口在第一参考轴线上的投影平面的坐标或这个坐标与上述厚度参考点之间的距离确定。
[0176]
因此,当操作者由于关节连接组件并且由于控制装置而移动切割引导件时,摄像头记录第一位置标记和第二位置标记。根据所拍摄的图像和参考标记,该算法实时计算切割平面的位置和方向参数。
[0177]
在一个其中传输信息的装置包括形成参考标记的轴线的显示的实施例中,这个显示优选地被叠加在膝盖的真实图像上。能够使用混合现实眼镜生成这个显示。
[0178]
最后,该方法包括将上述参数传输给操作者的步骤。该传输由根据本实用新型的辅助系统100的信息传输装置400完成。
[0179]
光学捕获装置可以是可移动的。实际上,由于第一标记43用作参考,所以摄像头能够移动而不会过度干扰该方法。因此,该方法与被布置在便携式物体,例如手机或眼镜中的摄像头的使用兼容。
[0180]
本实用新型还涉及一种根据上述方法的第二阶段来跟踪切割平面的方法。
[0181]
一旦将切割平面放置在操作员的所需位置,操作员就可以通过切割引导件附件将切割引导件附到骨骼上。然后能够将定位框架3与切割引导件2分离,并且可以将定位框架3从骨骼上移除。因此,仅切割引导件2保持附接到骨骼。
[0182]
在一个实施例中,这个步骤包括改换参考标记的在前子步骤。为此,相对于第一位置标记形成的该参考标记然后相对于与独自保持定位的切割引导件有关的第二位置标记换位。这样,尽管移除了支架和第一标记,参考标记仍由辅助系统保持。
[0183]
在实现该方法之后,操作员能够执行实际的外科手术治疗,并且使用先前定位的切割引导件根据切割平面切割骨骼。
[0184]
在一个实施例中,一旦骨骼被切割,该方法包括检验切割面的步骤。
[0185]
验证步骤包括提供点勘测工具,该点勘测工具包括如上所述的附接到平坦表面的标记。工具的表面被放置在完成的切割面上。工具标记相对于第二位置标记的位置和方向被用于将切割面与形成的地标进行比较。然后,算法能够像先前一样计算参数。因此,操作员能够有利地证实切割面确实与预期的切割面相似。
[0186]
辅助系统包括实现或管理用于辅助膝关节假体的安装的方法的硬件和/或软件元
件。特别地,该系统包括实现辅助膝关节假体放置的方法的步骤的硬件和/或软件元件。这些各种元件可以包括软件模块。
[0187]
例如,硬件和/或软件元件可以包括以下项中的全部或部分:
[0188]-光学捕获装置200,例如摄像头;
[0189]-至少一个根据本实用新型的切割装置1;
[0190]-交互装置250;
[0191]-计算机300;
[0192]-信息传输装置400;
[0193]-存储器或数据记录介质301;
[0194]-至少一个点勘测工具,例如指针6或夹持件7。
[0195]
在一个实施例中,数据存储介质301包括用于执行以下步骤的指令1000,如图11所示:
[0196]-接收包括第一标记的第一图像1100;
[0197]-从第一标记图像形成正交标记1200;和
[0198]-接收包括第一标记和第二标记的第二图像1300;和
[0199]-确定参考框架的空间中的截面平面1400,该截面平面由第二标记相对于第二图像中的第一标记的位置和方向形成;
[0200]-确定切割平面相对于所形成的标记的至少一个位置1500和/或方向参数;和
[0201]-将至少一个确定的参数的信息1600传输到传输装置。
[0202]
在一个实施例中,形成标记1200的步骤包括以下子步骤:
[0203]-相对于第一标记在空间上确定1210第一点;
[0204]-在待切割的骨骼的机械轴上在空间上确定1220第二点;和
[0205]-创建1230穿过第一点和第二点的第一轴线;
[0206]-形成1240包括第一轴线和第二垂直轴的参考框架,特别是通过将支架的已知轴线投影到垂直于第一参考轴线的平面上而形成的参考框架。
[0207]
在适用于胫骨的第一实施例中,确定第二点的子步骤包括以下步骤:
[0208]-接收包括第一标记和第三标记的至少一个图像;
[0209]-相对于图像中第三标记相对于第一标记的位置,确定第二点在空间中的位置。
[0210]
在适用于股骨的第二实施例中,确定第二点的子步骤包括以下步骤:
[0211]-接收多个图像,每个图像包括第一标记和另一个标记;
[0212]-从图像确定第一标记相对于其他标记的旋转中心;
[0213]-将第二点确定为第一标记的旋转中心。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。