1.本实用新型涉及海参捕捞技术领域,特别是涉及一种吸纳式海参捕捞装置。
背景技术:
2.海参属于无脊柱动物,棘皮动物科,海参体内不但富含氨基酸、维生素和化学元素等人体所需的50多种营养成分,还含有多种生物活性物质如酸性粘多糖、皂苷和胶原蛋白等,而且海参活性物质的药理活性十分广泛。
3.如今,人们对海参的需求量也越来越大,但是海参的捕捞方式还是最原始人工捕捞,而海参的捕捞季节,水下温度很低,对捕捞人员的伤害性很高。因此,就开始了大量的人工养殖海参,这样可以缓解市场的需求,但是人工养殖,同样也需要工作人员下水捕捞。因此,需要一种简单方便操作的自主海参捕捞装置来代替人工捕捞。
4.根据现有的海参自动捕捞装置可以分为两种,一种是夹取式,另外一种是吸取式。夹取式装置容易破坏海参内脏,且目前现有的装置多为深海捕捞,并不适用于人工养殖海参捕捞,同样大型机器的成本也比较高。为此,本实用新型提供一种近海吸取式捕捞装置来满足人工养殖的海参捕捞。
技术实现要素:
5.本实用新型的目的是提供一种吸纳式海参捕捞装置,降低了人工捕捞强度,同时也减少了水下作业对工作人员的伤害,又能够准确地捕捞海参,能够全天24小时工作,大大地提高了海参捕捞的效率。
6.为实现上述目的,本实用新型提供了一种吸纳式海参捕捞装置,包括控制机构、负压生成机构、海参收集机构和吸取机构,所述吸取机构设置在所述海参收集机构的前端,所述吸取机构通过吸取进料管道与所述海参收集机构连接,所述海参收集机构设置在所述负压生成机构的前端,所述海参收集机构通过第一传气管道与所述负压生成机构连接,所述负压生成机构设置在所述控制机构的前端。
7.优选的,所述海参收集机构包括储存罐、过滤网、第一常闭电磁阀、排水阀、海参收集口和第一压力变送器,所述储存罐顶端的一侧设有与所述储存罐相通的通气管,所述通气管上连接有所述第一常闭电磁阀,所述第一压力变送器设置在所述储存罐顶端的另一侧,所述储存罐的底端设有所述排水阀;
8.所述储存罐的前侧设有与所述吸取进料管道连接的吸取进料口,所述储存罐的后侧设有所述海参收集口,所述海参收集口处铰接有开启门,所述海参收集口的外部设有与所述开启门连接的电动推杆;
9.所述过滤网倾斜设置在所述储存罐的内部,所述过滤网的高端设置在所述吸取进料口的下侧,所述过滤网的底端设置在所述海参收集口的下侧。
10.优选的,所述负压生成机构包括底座、负压罐、水环式真空泵、第二常闭电磁阀、第二压力变送器、止回阀,所述负压罐设置在所述底座的上侧,所述水环式真空泵通过第二传
气管道连接在所述负压罐底端一侧,所述第二传气管道上设有所述止回阀,所述负压罐的顶端一侧通过所述第一传气管道与所述储存罐连接,所述第一传气管道上设有所述第二常闭电磁阀,所述第二压力变送器设置在所述负压罐的顶端另一侧。
11.优选的,所述吸取机构包括伸缩管、滑轨支架、直线导轨组、视觉装置以及照明灯,所述伸缩管通过转接件与所述吸取进料管连接,所述伸缩管与所述转接件之间设有连接法兰,所述伸缩管的底端设有滑板,所述滑板的中部设有与所述伸缩管相通的吸取口,所述滑板下侧位于所述吸取口一侧设有所述视觉装置,所述滑板通过所述直线导轨组与所述滑轨支架连接,所述滑轨支架的底部连接有所述照明灯。
12.优选的,所述直线导轨组包括x轴导轨、y轴导轨和z轴导轨,所述x 轴导轨、所述y轴导轨均平行对称设有两个,两个所述y轴导轨固定连接在所述滑轨支架顶端两侧;
13.所述x轴导轨的下侧设有与所述y轴导轨相匹配的滑块,所述x轴导轨连接在两个所述y轴导轨之间,所述x轴导轨与所述y轴导轨互相垂直设置,所述滑板的底部两侧设有与所述x轴导轨相匹配的第一滑槽,所述滑板通过所述第一滑槽与所述x轴导轨滑动连接;
14.所述z轴导轨设置在所述伸缩管的一侧,所述z轴导轨的顶端与所述连接法兰固定连接,所述z轴导轨的底端延伸至所述滑轨支架内,所述滑板的一侧设有与所述z轴导轨相匹配的第二滑槽;
15.所述x轴导轨、所述y轴导轨和所述z轴导轨均电性连接有伺服电机。
16.优选的,所述控制机构包括plc控制箱、触摸屏,所述触摸屏与所述plc 控制箱电性连接,所述plc控制器与所述第一常闭电磁阀、所述第二常压电磁阀、所述第一压力变送器、所述第二压力变送器、所述排水阀、所述电动推杆、所述水环式真空泵、所述伺服电机、所述视觉装置电性连接。
17.因此,本实用新型采用上述结构的一种吸纳式海参捕捞装置,降低了人工捕捞强度,同时也减少了水下作业对工作人员的伤害,又能够准确地捕捞海参,提高命中率,能够全天24小时工作,大大地提高了海参捕捞的效率。
18.下面通过附图和实施例,对本实用新型的技术方案做进一步的详细描述。
附图说明
19.图1是本实用新型一种吸纳式海参捕捞装置使用方法的流程图;
20.图2是本实用新型一种吸纳式海参捕捞装置实施例的示意图;
21.图3是本实用新型一种吸纳式海参捕捞装置的平面示意图;
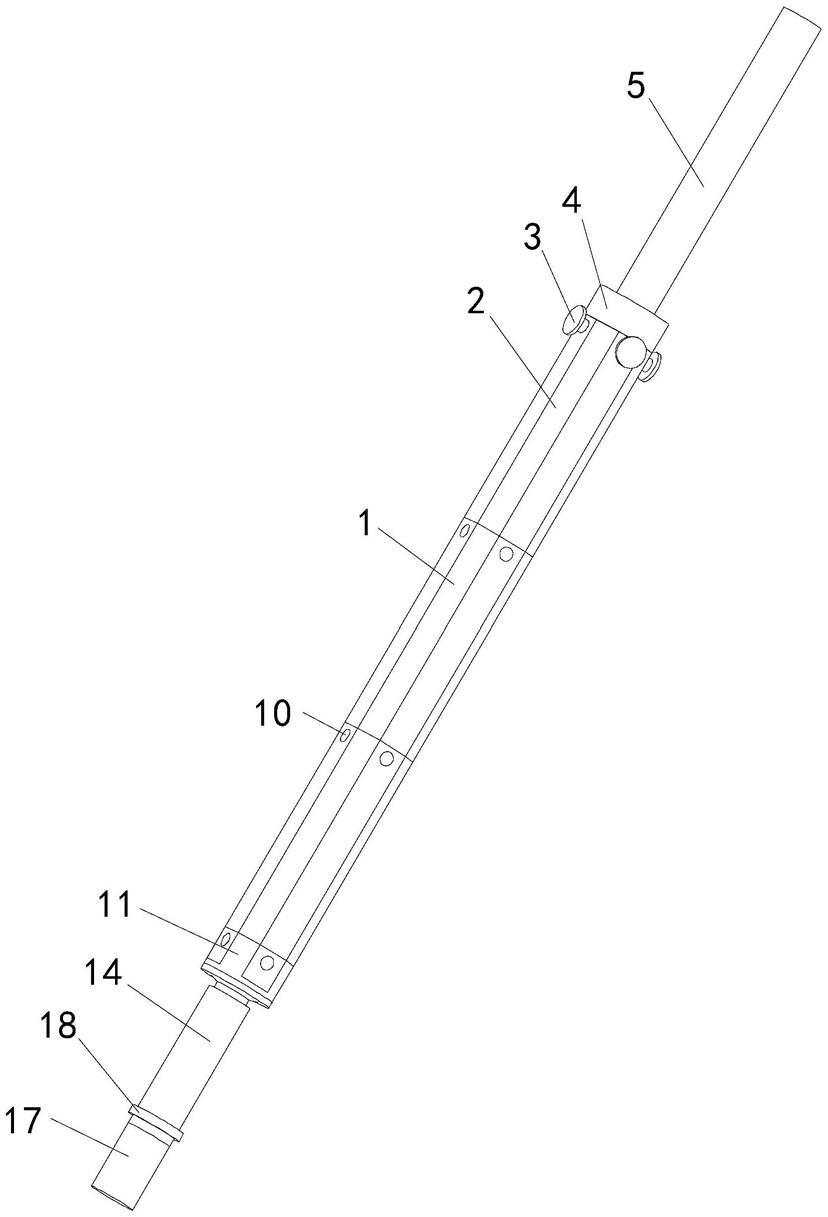
22.图4是本实用新型一种吸纳式海参捕捞装置吸取机构的示意图;
23.图5是本实用新型一种吸纳式海参捕捞装置滑板的示意图。
24.附图标记:
25.1、海参收集机构;101、储存罐;102、过滤网;103、第一常闭电磁阀; 104、排水阀;105、海参收集口;106、第一压力变送器;107、通气管;108、吸取进料口;109、开启门;110、电动推杆;
26.2、负压生成机构;201、底座;202、负压罐;203、水环式真空泵;204、第二常闭电磁阀;205、第二压力变送器;206、止回阀;
27.3、吸取机构;301、伸缩管;302、滑轨支架;303、直线导轨组;304、视觉装置;305、照
明灯;306、转接件;307、连接法兰;308、滑板;309、吸取口;310、x轴导轨;311、y轴导轨;312、z轴导轨;313、滑块;314、第一滑槽;315、第二滑槽;
28.4、控制机构;401、plc控制箱;402、触摸屏;
29.5、吸取进料管道;6、第一传气管道;7、第二传气管道。
具体实施方式
30.下面结合实施例,对本实用新型进一步描述。
31.实施例
32.请参阅图1至5,如图所示,本实用新型提供了一种一种吸纳式海参捕捞装置,包括控制机构4、负压生成机构2、海参收集机构1和吸取机构3,吸取机构3设置在海参收集机构1的前端,吸取机构3通过吸取进料管道5与海参收集机构1连接,海参收集机构1设置在负压生成机构2的前端,海参收集机构1通过第一传气管道6与负压生成机构2连接,负压生成机构2设置在控制机构4的前端。
33.海参收集机构1包括储存罐101、过滤网102、第一常闭电磁阀103、排水阀104、海参收集口105和第一压力变送器106,储存罐101顶端的一侧设有与储存罐101相通的通气管107,通气管107上连接有第一常闭电磁阀103,第一压力变送器106设置在储存罐101顶端的另一侧,储存罐101的底端设有排水阀104,当海参进入到储存罐101时也会带有大量的水进入,而排水阀 104的设置便是将吸取过程中带入的海水和其它杂质排出,通气管107与第一常压电磁阀的设置方便在排水时,增加空气流动,使海水更顺利的排出。
34.储存罐101的前侧设有与吸取进料管道5连接的吸取进料口108,吸取进料管道5与储存罐101相切连接,储存罐101的后侧设有海参收集口105,海参收集口105处铰接有开启门109,海参收集口105的外部设有与开启门109 连接的电动推杆110,用电动杆打开和关闭开启门109,便于将储存罐101中的海参取出并收集。过滤网102倾斜设置在储存罐101的内部,过滤网102 的高端设置在吸取进料口108的下侧,过滤网102的底端设置在海参收集口 105的下侧,海参通过吸取机构3进入到储存罐101内进入到过滤网102的上侧,将海水通过过滤网102漏下,然后海参再顺着过滤网102的斜面向海参收集口105处滑落。
35.负压生成机构2包括底座201、负压罐202、水环式真空泵203、第二常闭电磁阀204、第二压力变送器205、止回阀206,负压罐202设置在底座201 的上侧,底座201将负压罐202支撑稳定。水环式真空泵203通过第二传气管道7连接在负压罐202底端一侧,第二传气管道7上设有止回阀206,水环式真空泵203用于将负压罐202抽取真空,止回阀206的设置防止在水环式真空泵203关闭后,气体回流。
36.负压罐202的顶端一侧通过第一传气管道6与储存罐101连接,第一传气管道6上设有第二常闭电磁阀204,第二常闭电磁阀204便于控制储存罐 101中的气体,使储存罐101中的气体能够通过第一传气管道6进入负压罐202中,从而使储存罐101内形成吸取负压。第二压力变送器205设置在负压罐202的顶端另一侧,并与负压罐202相通,监测负压罐202气体,当负压罐202气体到达一定值后,关闭水环式真空泵203。
37.吸取机构3包括伸缩管301、滑轨支架302、直线导轨组303、视觉装置 304以及照明灯305,伸缩管301通过转接件306与吸取进料管连接,伸缩管 301与转接件306之间设有连接法兰307,伸缩管301的底端设有滑板308,滑板308的中部设有与伸缩管301相通的吸取口
309,用来吸取海参和海水,滑板308下侧位于吸取口309一侧设有视觉装置304,用来拍摄水下海参情况。滑板308通过直线导轨组303与滑轨支架302连接,滑轨支架302的底部连接有照明灯305,照明水下情况。照明灯305为视觉装置304提供光线,为视觉装置304定位海参提供便利条件,当视觉装置304定位到海参时,通过直线导轨组303移动滑板308将吸取口309移动到海参的正上方,然后启动水环式真空泵203,往负压罐202中抽取真空,根据估测海参的大小,调节真空泵工作时间,让负压罐202和储存罐101形成不同的压差,到达一定值后,将真空泵关闭。根据估测海参的大小、储存罐101容积、第一压力变送器106 的压力值,控制第二常闭电磁阀204导通时间,利用合适的负压虹吸,能够将海参悬浮式吸取到储存罐101中并留在过滤板上。
38.直线导轨组303包括x轴导轨310、y轴导轨311和z轴导轨312,括x 轴导轨310、y轴导轨311和z轴导轨312均为电动导轨,x轴导轨310、y 轴导轨311和z轴导轨312均电性连接有伺服电机(伺服电机为现有技术,故未在附图中显示)。通过伺服电机启动x轴导轨310、y轴导轨311和z轴导轨312,从而便于进行x、y、z三轴方向上的移动。
39.x轴导轨310、y轴导轨311均平行对称设有两个,两个y轴导轨311 固定连接在滑轨支架302顶端两侧;x轴导轨310的下侧设有与y轴导轨311 相匹配的滑块313,x轴导轨310连接在两个y轴导轨311之间,x轴导轨310与y轴导轨311互相垂直设置,滑板308的底部两侧设有与x轴导轨310 相匹配的第一滑槽314,滑板308通过第一滑槽314与x轴导轨310滑动连接;滑板308通过第一滑槽314能够在x轴导轨310上移动,从而带动吸取口309在x轴方向移动,x轴导轨310的下侧通过滑块313与y轴导轨311 相配合,从而带动吸取口309在y轴方向移动,便于对海参进行准确的定位。
40.z轴导轨312设置在伸缩管301的一侧,z轴导轨312的顶端与连接法兰 307固定连接,z轴导轨312的底端延伸至滑轨支架302内,滑板308的一侧设有与z轴导轨312相匹配的第二滑槽315;滑板308通过第二滑槽315在z 轴导轨312上移动从而将伸缩管301拉开,便于将吸取口309精准的移动到海参的正上方对海参进行准确的吸取。
41.控制机构4包括plc控制箱401、触摸屏402,触摸屏402与plc控制箱401电性连接,能够显示罐中的真空值,控制阀件以及监测各个环节的情况,plc控制器与第一常闭电磁阀103、第二常压电磁阀、第一压力变送器 106、第二压力变送器205、排水阀104、电动推杆110、水环式真空泵203、伺服电机、视觉装置304电性连接,从而对各个部件进行控制,实现海参捕捞的自动化,大大提高了海参捕捞的效率。
42.具体的工作过程,包括以下步骤:
43.1)在抓捕之前,要保证整个设备的密封性;
44.2)当水下视觉装置发现并定位到海参时,通过plc控制带有伺服电机的直线导轨组,将吸取口移动到海参上方;
45.3)同时将水环式真空泵打开,将负压罐中抽取真空,根据估测海参的大小,调节水环式真空泵的工作时间,让负压罐和储存罐形成不同的压差,到达一定值后,将真空泵关闭;
46.4)根据估测海参的大小、储存罐容积、第一压力变送器的压力值,控制第二常闭电磁阀导通时间,利用合适的负压虹吸,能够将海参悬浮式吸取到储存罐中并留在过滤板上;
47.5)之后再同时打开储存罐上的第一常闭电磁阀和排水阀,能够将储存罐中的海水
和其他杂物从排水阀排出;
48.6)当整个过程结束后,重新定位下一个海参,重复上述过程,当储存罐中的海参达到一定的数量后,打开储存罐海参收集口,将海参从中取出。
49.因此,本实用新型采用上述结构的一种吸纳式海参捕捞装置,主要是利用真空负压吸取的原理,首先利用视觉装置来判断海参的位置,然后利用直线导轨组将吸取口通过左右和上下移动,到达海参的正上方,提高对海参的命中率,同时,水环式真空泵已经将负压罐抽真空,让负压罐和外界形成一定的压差,通过估测海参的大小和观察负压罐中的负压值,调节水环真空泵的工作时间,利用合适的负压虹吸,就可以将海参悬浮式吸取到储存罐中,降低海参的应激,实现海参的自动高效捕捞。
50.最后应说明的是:以上实施例仅用以说明本实用新型的技术方案而非对其进行限制,尽管参照较佳实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对本实用新型的技术方案进行修改或者等同替换,而这些修改或者等同替换亦不能使修改后的技术方案脱离本实用新型技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。