1.本实用新型属于振镜系统领域,尤其涉及一种具有位置反馈、电压检测及电流监控的振镜系统。
背景技术:
2.市场上现有振镜系统基本上只能接受控制卡指令、跟随控制卡指令动作,而无任何数据反馈给控制卡,这导致振镜未连接、损坏而控制系统无法知道,从而导致产品报废、电池焊接起火等其它严重后果,降低了系统的可靠性。并且如果外界指令异常时,无与外界交互方式,易引起振镜损坏及加工产品报废,外界电源异常时,无与外界交互方式,易引起振镜损坏及加工产品报废,电机过流时,无合适的保护措施,易引起振镜的损坏,无电机位置反馈,控制系统不能实时了解振镜工作状态,很多高要求的环境不能使用。
技术实现要素:
3.本实用新型的目的在于提供一种具有位置反馈、电压检测及电流监控的振镜系统,旨在解决现有技术中如果外界指令异常时,无与外界交互方式,易引起振镜损坏及加工产品报废,外界电源异常时,无与外界交互方式,易引起振镜损坏及加工产品报废,电机过流时,无合适的保护措施,易引起振镜的损坏,无电机位置反馈,控制系统不能实时了解振镜工作状态,很多高要求的环境不能使用的技术问题。
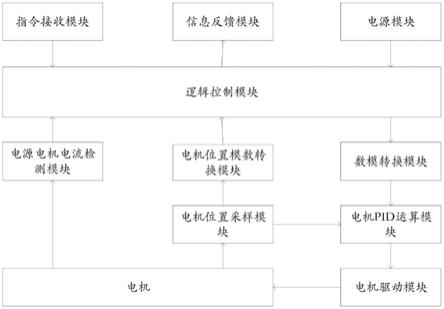
4.本实用新型是这样实现的,一种具有位置反馈、电压检测及电流监控的振镜系统,所述振镜系统包括逻辑控制模块,连接所述逻辑控制模块的指令接收模块、信息反馈模块、数模转换模块、电机位置模数转换模块及电源电机电流检测模块,连接所述电机位置模数转换模块的电机位置采样模块,连接所述电机位置采样模块与所述数模转换模块的电机pid运算模块,连接所述电机pid运算模块的电机驱动模块,连接所述电源电机电流检测模块、所述电机位置采样模块及所述电机驱动模块的电机,及电性连接所述逻辑控制模块、所述指令接收模块、所述信息反馈模块、所述数模转换模块、所述电机位置模数转换模块、所述电源电机电流检测模块、所述电机位置采样模块、所述电机pid运算模块、所述电机驱动模块及所述电机的电源模块;
5.所述逻辑控制模块:用于协调各个模块之间工作及数据处理;
6.所述指令接收模块:用于接收外部控制系统输入的信号并传递给逻辑控制模块;
7.所述信息反馈模块:用于将采集的各种信号输出至外部控制系统;
8.所述数模转换模块:用于将外部输入的数字信号转换成模拟信号;
9.所述电机位置模数转换模块:用于将采集的电机位置模拟信号转换成数字信号并输出给逻辑控制模块;
10.所述电源电机电流检测模块:用于采集电源电压及采集电机驱动电流并输出给逻辑控制模块;
11.所述电机位置采样模块:用于采集电机的位置;
12.所述电机pid运算模块:用于根据外部模拟信号对电机速度、目标位置、实际位置三者的关系进行运算后输出控制信号到电机驱动模块;
13.所述电机驱动模块:用于驱动电机工作;
14.电源模块:用于为各个模块及电机提供所需电压。
15.本实用新型的进一步技术方案是:所述逻辑控制模块包括pld芯片及辅助所述pld芯片工作的外围辅助电路。
16.本实用新型的进一步技术方案是:所述外围辅助电路包括连接所述pld芯片的pld电源滤波电路、时钟电路、复位电路及程序烧写电路。
17.本实用新型的进一步技术方案是:所述电机pid运算模块包括微分电路,连接所述微分电路的误差比例系数电路,及连接所述误差比例系数电路的积分电路。
18.本实用新型的进一步技术方案是:所述电源电机电流检测模块包括供电电源电压、电机电路采样adc电路,连接所述供电电源电压、电机电路采样adc电路的 -15v电源处理电路,及连接所述供电电源电压、电机电路采样adc电路的电机电流处理电路。
19.本实用新型的进一步技术方案是:所述电机驱动模块包括信号放大电路,连接所述信号放大电路的单端转差分电路,连接所述单端转差分电路的推挽驱动电路,连接所述单端转差分电路及所述推挽驱动电路的电路检测电路,及连接所述推挽驱动电路的驱动使能电路。
20.本实用新型的进一步技术方案是:所述电源模块包括外部接口连接器电路,连接所述外部接口连接器电路的 15v转 12v电路、 15v转 3.3v电路及 15v转 5v电路,及连接所述 15v转 12v电路的 12v转5v基准电路。
21.本实用新型的进一步技术方案是:所述电源模块还包括连接所述外部接口连接器电路的-15v转-12v电路。
22.本实用新型的有益效果是:此种振镜系统采用闭环振镜可消除振镜不到位时出光引起的产品报废及起火问题,闭环振镜切割,可实时采集振镜位置,通过一定算法可将拐角、起始位置重点清楚,避免因振镜速度的不均匀引起的能量局部累积而导致的切割线条粗细不均的问题,振镜状态监控应用于wob头,可避免振镜异常引起的聚焦镜片损坏,并且结构简单成本低。
附图说明
23.图1是本实用新型实施例提供的一种具有位置反馈、电压检测及电流监控的振镜系统的系统框图;
24.图2是本实用新型实施例提供的一种具有位置反馈、电压检测及电流监控的振镜系统的逻辑控制模块的pld芯片的电器原理图;
25.图3是本实用新型实施例提供的一种具有位置反馈、电压检测及电流监控的振镜系统的逻辑控制模块的pld电源滤波电路的电器原理图;
26.图4是本实用新型实施例提供的一种具有位置反馈、电压检测及电流监控的振镜系统的逻辑控制模块的时钟电路的电器原理图;
27.图5是本实用新型实施例提供的一种具有位置反馈、电压检测及电流监控的振镜系统的逻辑控制模块的复位电路的电器原理图;
28.图6是本实用新型实施例提供的一种具有位置反馈、电压检测及电流监控的振镜系统的逻辑控制模块的程序烧写电路的电器原理图;
29.图7是本实用新型实施例提供的一种具有位置反馈、电压检测及电流监控的振镜系统的指令接收模块的电器原理图;
30.图8是本实用新型实施例提供的一种具有位置反馈、电压检测及电流监控的振镜系统的信息反馈模块的电器原理图;
31.图9是本实用新型实施例提供的一种具有位置反馈、电压检测及电流监控的振镜系统的数模转换模块的电器原理图;
32.图10是本实用新型实施例提供的一种具有位置反馈、电压检测及电流监控的振镜系统的电机位置模数转换模块的电器原理图;
33.图11是本实用新型实施例提供的一种具有位置反馈、电压检测及电流监控的振镜系统的电源电机电流检测模块的供电电源电压、电机电路采样adc电路的电器原理图;
34.图12是本实用新型实施例提供的一种具有位置反馈、电压检测及电流监控的振镜系统的电源电机电流检测模块的 -15v电源处理电路的电器原理图一;
35.图13是本实用新型实施例提供的一种具有位置反馈、电压检测及电流监控的振镜系统的电源电机电流检测模块的 -15v电源处理电路的电器原理图二;
36.图14是本实用新型实施例提供的一种具有位置反馈、电压检测及电流监控的振镜系统的电源电机电流检测模块的电机电流处理电路的电器原理图;
37.图15是本实用新型实施例提供的一种具有位置反馈、电压检测及电流监控的振镜系统的电机位置采样模块的电器原理图一;
38.图16是本实用新型实施例提供的一种具有位置反馈、电压检测及电流监控的振镜系统的电机位置采样模块的电器原理图二;
39.图17是本实用新型实施例提供的一种具有位置反馈、电压检测及电流监控的振镜系统的电机pid运算模块的电器原理图;
40.图18是本实用新型实施例提供的一种具有位置反馈、电压检测及电流监控的振镜系统的电机驱动模块的电器原理图一;
41.图19是本实用新型实施例提供的一种具有位置反馈、电压检测及电流监控的振镜系统的电机驱动模块的驱动使能电路的电器原理图;
42.图20是本实用新型实施例提供的一种具有位置反馈、电压检测及电流监控的振镜系统的电源模块的外部接口连接器电路的电器原理图;
43.图21是本实用新型实施例提供的一种具有位置反馈、电压检测及电流监控的振镜系统的电源模块的 15v转 12v电路的电器原理图;
44.图22是本实用新型实施例提供的一种具有位置反馈、电压检测及电流监控的振镜系统的电源模块的 15v转 3.3v电路的电器原理图;
45.图23是本实用新型实施例提供的一种具有位置反馈、电压检测及电流监控的振镜系统的电源模块的 15v转 5v电路的电器原理图;
46.图24是本实用新型实施例提供的一种具有位置反馈、电压检测及电流监控的振镜系统的电源模块的 12v转5v基准电路的电器原理图;
47.图25是本实用新型实施例提供的一种具有位置反馈、电压检测及电流监控的振镜
系统的电源模块的-15v转-12v电路的电器原理图。
具体实施方式
48.图1-25示出了本实用新型提供的一种具有位置反馈、电压检测及电流监控的振镜系统,所述振镜系统包括逻辑控制模块,连接所述逻辑控制模块的指令接收模块、信息反馈模块、数模转换模块、电机位置模数转换模块及电源电机电流检测模块,连接所述电机位置模数转换模块的电机位置采样模块,连接所述电机位置采样模块与所述数模转换模块的电机pid运算模块,连接所述电机pid运算模块的电机驱动模块,连接所述电源电机电流检测模块、所述电机位置采样模块及所述电机驱动模块的电机,及电性连接所述逻辑控制模块、所述指令接收模块、所述信息反馈模块、所述数模转换模块、所述电机位置模数转换模块、所述电源电机电流检测模块、所述电机位置采样模块、所述电机pid运算模块、所述电机驱动模块及所述电机的电源模块;
49.所述逻辑控制模块:用于协调各个模块之间工作及数据处理;
50.所述指令接收模块:用于接收外部控制系统输入的信号并传递给逻辑控制模块;
51.所述信息反馈模块:用于将采集的各种信号输出至外部控制系统;
52.所述数模转换模块:用于将外部输入的数字信号转换成模拟信号;
53.所述电机位置模数转换模块:用于将采集的电机位置模拟信号转换成数字信号并输出给逻辑控制模块;
54.所述电源电机电流检测模块:用于采集电源电压及采集电机驱动电流并输出给逻辑控制模块;
55.所述电机位置采样模块:用于采集电机的位置;
56.所述电机pid运算模块:用于根据外部模拟信号对电机速度、目标位置、实际位置三者的关系进行运算后输出控制信号到电机驱动模块;
57.所述电机驱动模块:用于驱动电机工作;
58.电源模块:用于为各个模块及电机提供所需电压。
59.图2-6示出了所述逻辑控制模块包括pld芯片及辅助所述pld芯片工作的外围辅助电路。所述外围辅助电路包括连接所述pld芯片的pld电源滤波电路、时钟电路、复位电路及程序烧写电路。逻辑控制模块采用lattice的规格为“lcmxo2-1200hc-4tg100i”的pld芯片,其电路及配套电路设计完全按照此芯片的设计规范来设计,基本功能为将从外部控制系统接收的指令转换成数模转换芯片“ad5545bruz”能接收的信号,将模数转换芯片ads7946srter和adc128s052cimtx采集的电机位置值、电源电压值及电机电流值转换成外部控制系统能接收的协议,然后通过信息反馈模块输出至外部控制系统。
60.图7示出了指令接收模块采用rs422接收芯片am26lv32e作为接收模块芯片,其功能是将差分信号转换成逻辑控制模块能够接收的单端信号,共四路,分别接收外部系统输入的clk、sync、data_x、data_y信号。跨接在差分输入端的电阻、电容为阻抗匹配电阻,用于提高信号质量。
61.图8示出了信息反馈模块采用rs422驱动芯片am26lv31e作为信号反馈芯片,其功能是将逻辑控制模块采集的电机位置信号、供电电源电压信号、电机电流信号输出至外部控制系统,其将单端信号转换成抗干扰很强的差分信号输出。
62.图9示出了数模转换模块采用adi的16位数模转换芯片“ad5545”,将外部输入的振镜位置信号转换成0~5v的模拟信号,再通过运放u10将信号调制成-5v~ 5v,用于控制振镜电机角度位置, 5v_ref和运放u10用于生成一个-5v的电压偏置。
63.图10示出了电机位置模数转换模块将电机位置采样模块采集的位置信号通过运放调节成模数转换模块能接受的信号,模数转换芯片再将其转换成数字信号输出至逻辑控制模块,u27为反向信号放大1/2倍电路,用于将位置信号调制到-2.5v~ 2.5v,u26将输入信号进行偏置,调制后的信号电压为0~5v。u25为模数转换芯片,将调制后的信号转换成数字信号输出至逻辑控制模块。
64.图15-16示出了电机位置采样模块由于电机的角度信号为差分的电流信号,u15将电流信号转换成电压信号,u6对反馈的差分信号作差后输出,再经过u1进行调理输出满足系统要求的电平信号。
65.图17示出了所述电机pid运算模块包括微分电路,连接所述微分电路的误差比例系数电路,及连接所述误差比例系数电路的积分电路。电机pid运算模块通过对电机速度、目标位置、实际位置三者的关系进行运算后输出控制信号到电机驱动模块用于驱动电机到指定位置;微分电路,u5部分为一个带通滤波器,用于对位置进行微分,得出电机的速度,r37及c52决定了低频段,c29、r38决定了高频段,u19-a用于对信号进行反向,damp3用于调节微分项的比例系数;误差比例系数电路,u5-a输入信号为电机实际位置及外部控制系统要求到的位置,通过u5-a进行减法运算后(pos输入为-cmd)输出位置误差信号,再经过u18-b进行反向后输出,damp2用于调节比例系数;积分电路,u18-a为一积分模块,用于对位置误差进行积分,damp1用于调节积分项的比例系数。
66.图11-14示出了所述电源电机电流检测模块包括供电电源电压、电机电路采样adc电路,连接所述供电电源电压、电机电路采样adc电路的 -15v电源处理电路,及连接所述供电电源电压、电机电路采样adc电路的电机电流处理电路。 -15v电源处理电路,u3-a运放将-15v转换成3.825v,再经过u23-a缓存后输入至模数转换输入端,u3-b运放将 15v转换成3.825v,再经过u23-b缓存后输入至模数转换输入端,u23-c将采集的电机电流信号经过偏置、放大后输出至模数转换输入端,供电电源电压、电机电流采样adc,采用adc088s022cimt芯片,其最大采样率为200ksps,其将采集的电源电压、电机电流输出至逻辑控制模块,逻辑控制模块通过信号反馈模块反馈至外部控制系统。
67.图18-19示出了所述电机驱动模块包括信号放大电路,连接所述信号放大电路的单端转差分电路,连接所述单端转差分电路的推挽驱动电路,连接所述单端转差分电路及所述推挽驱动电路的电流检测电路,及连接所述推挽驱动电路的驱动使能电路。驱动使能电路,u30为一光耦,用于隔离及电平转换,单mute_x输入低电平时,u30的输出三极管工作在饱和状态,此时驱动芯片处于使能状态,系统可以开始正常工作;信号放大电路,u29-b将pid运算后的结果进行加法运算后输出至单端转差分电路端进行下一步处理;电流检测电路,u14通过电阻r31、r36、r41、r52对采样电阻r82上的电压差进行采样,u14输出电压与电机电流的关系为vout=1.78*0.3*i;单端转差分电路,u13-a将信号放大电路的输入信号及电流检测电路的输入信号进行减法运算及滤波后输出,u13-b对u13-a的输出信号进行反向;推挽驱动电路,其采用音频功率放大器lm3886芯片,其单芯片驱动能力能到68w,推挽式驱动能到136w,u13-a的输出端接u16的正向输入端,u16的输出端接电机正向输入端,u13-b
的输出端接u17的正向输入端,u17的输出端接电机反向输入端,f2为保险管,在异常情况下用于保护电机不被烧坏,r82串接在电机线圈上,用于采集电机上的电流,d7、d8、d15、d16为续流二极管,在异常情况下降低电机上的感应电动势,用于保护u16及u17。
68.图20-25示出了所述电源模块包括外部接口连接器电路,连接所述外部接口连接器电路的 15v转 12v电路、 15v转 3.3v电路及 15v转 5v电路,及连接所述 15v转 12v电路的 12v转5v基准电路。所述电源模块还包括连接所述外部接口连接器电路的-15v转-12v电路。电源模块为整个系统提供 12v、-12v、 3.3v、5v、5v基准电源,为整个系统工作提供保障。
69.振镜系统通过指令接收模块接收外部振镜控制系统的位置信号,逻辑控制模块将接收的指令转换为数模转换模块能够接收的指令,通过运算放大、滤波后输出至电机pid运算模块。
70.电机的角度位置通过电机位置采样模块采集,经过运算放大、滤波后输出至电机pid运算模块。
71.电机pid运算模块在接收到电机的实际位置信号、外部控制系统要求的目的位置信号后通过电机pid运算模块运算后输出驱动信号至电机驱动模块,电机驱动模块根据驱动信号大小、方向相应的驱动电机,实现闭环控制。
72.此种振镜系统采用闭环振镜可消除振镜不到位时出光引起的产品报废及起火问题,闭环振镜切割,可实时采集振镜位置,通过一定算法可将拐角、起始位置重点清楚,避免因振镜速度的不均匀引起的能量局部累积而导致的切割线条粗细不均的问题,振镜状态监控应用于wob头,可避免振镜异常引起的聚焦镜片损坏,并且结构简单成本低。
73.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。