1.本发明涉及一种砂浆抛射抹平机器人,属于建筑装修领域的砂浆喷涂机械制造领域。
背景技术:
2.目前水泥砂浆的墙面施工大部分仍需要依靠人力完成,这种施工方式劳动强度大,施工效率低,施工效果不理想。
3.现在水泥砂浆喷涂机械已广泛应用于建筑墙面装修领域,其中应用较广的是砂浆喷机,这种机械虽在一定程度上解决了墙面装修的诸多问题,例如人工依赖性强、工作效率低等,但由于其自身结构的限制,使得该机械在施工时易堵塞供浆管道,在完成喷涂作业时难于清理残余砂浆,并且这种装置不能同时进行砂浆的喷涂和抹平,降低了作业效率。针对上述问题,本发明人提出一种砂浆抛射抹平机器人,这种机器人综合采用了行走装置、升降装置、抛射抹平装置以及控制装置,其中抛射抹平装置设置有抛浆风轮和抹平刮板,分别实现砂浆的抛射和抹平功能,不仅解决了砂浆堵塞问题,而且实现了喷抹一体化。
技术实现要素:
4.本发明解决的技术问题是:提供一种砂浆抛射抹平机器人,通过各装置之间的协调工作,提高了墙面施工的自动化程度,并且通过采用抛射抹平装置,使得机器人在施工时避免了砂浆堵塞,在施工后便于清理残余砂浆。其次,抛射抹平装置可以同时进行砂浆的抛射和抹平,提高了施工效率。
5.本发明为解决其技术问题所采用的技术方案是:所述的砂浆抛射抹平机器人,其特征在于:包括行走装置、升降装置、抛射抹平装置以及控制装置,其中抛射抹平装置包括:抛浆风轮,抛浆风轮的表面均匀设置抛浆板,相邻两个抛浆板之间形成砂浆过渡槽,抛浆风轮轴向两端向外延伸形成风轮圆盘,抛浆板两端与风轮圆盘连接,抛浆风轮上侧设有进料槽,进料槽底部设有出料口,抛浆风轮径向一侧外设有砂浆挡板,抛浆风轮轴向两侧设有连接架,连接架布置于抹平刮板上。
6.所述的行走装置由机架和移动脚轮构成,其作用是带动整个砂浆抛射抹平机器人沿着施工轨迹间歇运动,使砂浆抛射抹平工作得以持续进行。
7.所述的升降装置搭载在行走装置上,当砂浆抛射抹平机器人针对高处的墙面进行施工时,升降装置沿竖直方向进行移动,进而带动抛射抹平装置沿竖直方向对墙面进行施工。
8.所述的抛射抹平装置搭载在升降装置上,当砂浆抛射抹平机器人对墙面施工作业时,抛射抹平装置的抛浆风轮开始转动,进而将进料槽底部流出的砂浆抛射到建筑物墙面,并且可以通过控制抛浆风轮的转速控制砂浆抛射到建筑物墙面的区域面积。
9.由于抛射抹平装置的抛浆风轮表面均匀设置有抛浆板,相邻两个抛浆板之间形成砂浆过渡槽,所以砂浆可以由进料槽底部出料口流至抛浆板表面,施工时抛浆风轮开始转
动,流至抛浆板表面的砂浆在离心力的作用下向建筑物墙面抛射,由此在墙面形成砂浆层,为后续抹平工作做准备。
10.所述抛射抹平装置除抛浆风轮两端的风轮圆盘外,抛浆风轮两端之间另设有1~10个风轮圆盘,可进一步对抛浆板起到支撑作用,提高抛浆板的刚度和承载能力。
11.所述抛射抹平装置中的抛浆板两端与风轮圆盘连接,两风轮圆盘对抛浆板形成两个支撑面,因此增加了抛浆板的刚度和承载能力。
12.所述抛射抹平装置中相邻抛浆板之间形成的砂浆过渡槽处于半封闭状态,防止砂浆泄露,同时由于抛浆板设置在抛浆风轮表面,并且与抛浆风轮连为一体,因此可以增加整个抛浆风轮装置的结构刚度。
13.所述抛射抹平装置中的砂浆挡板,其横截面为圆弧状,外形为抛浆风轮轮面形状,砂浆挡板可防止砂浆飞溅。
14.所述抛射抹平装置中的进料槽,其长度等于抛浆风轮轮身长度,由此可提高供料效率。
15.所述抛射抹平装置中抛浆板的宽度一直延伸至风轮圆盘,由此增加了抛浆板的宽度,进而增大了砂浆过渡槽的宽度,提高了收料效率。
16.所述抛射抹平装置中的进料槽,其底部出料口向外延伸并倾斜,由此达到与砂浆过渡槽相适配,提高了供料效率。
17.所述抛射抹平装置中抛浆风轮为中空状,由此减少了材料成本,同时减少了抛浆风轮自身重量。
18.所述抛射抹平装置中的抹平刮板近于抛射面一端,可用于完成后续砂浆抹平工作,实现砂浆抛射和抹平一气呵成,提高了装置的工作效率。
19.本发明的有益效果是:
20.1、本发明综合采用行走装置、升降装置、控制装置以及抛射抹平装置来完成砂浆的抛射抹平工作,减少了人工的使用,通过各个装置之间的协调工作,有效地提高了施工精度,增加了砂浆抛射抹平机器人的自动化程度;
21.2、本发明通过抛射抹平装置的使用,利用该装置中的抛浆风轮和抹平刮板分别作为抛射机构和抹平机构,实现了喷抹一体化;
22.3、本发明的抛射抹平装置采用抛浆风轮与砂浆挡板组合形成半封闭状态,有效解决砂浆飞溅问题,同时完成施工作业后易于清理;
23.4、本发明的抛射抹平装置由于抛浆风轮轴向两端向外延伸形成风轮圆盘,且风轮圆盘与抛浆板两端连接,因此装置设置的抛浆板不仅可以依靠根部与抛浆风轮轮体连接,而且抛浆板的两端可以与风轮圆盘连接,因此形成了3个支撑面,增加了抛浆装置的稳定性,避免了由于抛浆板受到不均衡负载的作用,出现弹性变形,而产生波动,保证了砂浆的抛射角度,提高了砂浆抛射效果。
附图说明
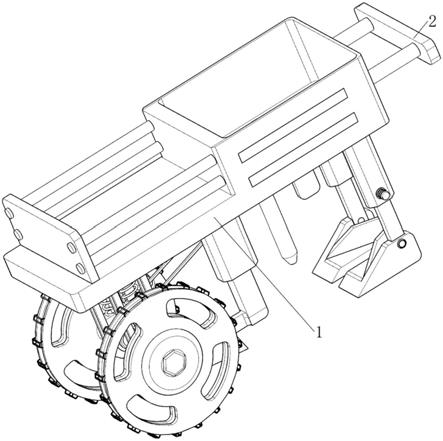
24.图1是本发明的结构示意图。
25.图2是图1中抛射抹平装置的结构示意图。
26.图3是图2中抛浆风轮的结构示意图。
27.图4是图2中抹平刮板抹平面的结构示意图。
28.图1中:1、行走装置;2、控制装置;3、抛射抹平装置;4、升降装置。
29.图2中:5、进料槽;6、砂浆挡板;7、抛浆风轮;8、连接架;9、抹平刮板。图3中:10、抛浆风轮轮体;11、抛浆板;12、风轮圆盘。
具体实施方式
30.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案作进一步清楚、完整的描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
31.需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互结合。
32.下面结合附图和具体实施实例对本发明作进一步说明,但不作为本发明的限定。
33.下面结合附图说明本实施方式,本发明所述的一种砂浆抛射抹平机器人,包括:行走装置(1)、升降装置(4)、抛射抹平装置(3)以及控制装置(2),其中抛射抹平装置(3)包括:抛浆风轮(7),抛浆风轮(7)的表面均匀设置抛浆板(11),相邻两个抛浆板(11)之间形成砂浆过渡槽,抛浆风轮(7)轴向两端向外延伸形成风轮圆盘(12),抛浆风轮(7)轮身设有风轮圆盘(12),抛浆板(11)两端与风轮圆盘(12)连接,抛浆风轮(7)上侧设有进料槽(5),进料槽(5)底部设有供料口,抛浆风轮(7)径向一侧外设有砂浆挡板(6),抛浆风轮(7)轴向两侧设有连接架(8),连接架(8)布置于抹平刮板(9)上。
34.上述装置或结构,工作时,通过控制底部行走装置(1)将砂浆抛射抹平机器人运动到距离墙面合适的位置,当机器人到达指定工位时,抛射抹平装置(3)开始工作,通过砂浆管将砂浆输送至进料槽(5)中,水泥砂浆在重力作用下向进料槽(5)底部流动,砂浆流经出料口落到抛浆板(11)上,抛浆风轮(7)转动产生离心力,在离心力的作用下,完成砂浆抛射至建筑物墙面的工作。当机器人开始进行砂浆抛射工作时,升降装置(4)同步进行上升,在装置上升的过程中抹平刮板(9)的抹平面对砂浆进行抹平,由此机器人实现对墙面的连续施工。当机器人完成该工位的施工时,通过控制底部行走装置(1)到达下一个工位进行施工,如此循环工作,最终完成整个墙面的施工。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。