1.本发明涉及防灾减灾技术领域,具体地说是一种地下空间多维灾情信 息多屏联动可视化方法。
背景技术:
2.城市地下空间的发展是当今中国乃至世界发展的主旋律,综合利用地 下空间已经成为缓解城市发展瓶颈的首选技术政策,以地铁和地下公共建 筑等为代表的城市地下空间在很大程度上缓解了城市快速发展过程中产生 的相关矛盾。
3.地下空间作为一个封闭空间,一旦地下空间发生灾害,首要解决的就 是对灾害有一个全面精准的判断,才能及时有效的进行处理,而由于地下 空间的特殊性,目前尚没有既能考虑全局又能直观感受的灾情可视化处理 的方法。
4.因此需要设计一种地下空间多维灾情信息多屏联动可视化方法,通过 对二、三维时空数据的优点进行兼顾,既可以利用成熟的二维空间技术进 行复杂灾情信息的管理和相关空间分析,又可以利用三维虚拟现实技术和 对多源多尺度数据的处理能力,地下空间多维信息多屏联动可视化可以实 现二三维场景多屏联动,在灾害救援过程中,救援装备、救援人员等多类 型移动目标需要接入与二三维地图匹配、实时动态标定与自适应可视化。
技术实现要素:
5.本发明的目的是克服现有技术的不足,提供了一种地下空间多维灾情 信息多屏联动可视化方法,通过对二、三维时空数据的优点进行兼顾,既 可以利用成熟的二维空间技术进行复杂灾情信息的管理和相关空间分析, 又可以利用三维虚拟现实技术和对多源多尺度数据的处理能力,地下空间 多维信息多屏联动可视化可以实现二三维场景多屏联动,为地下空间智能 服务提供了可视化的基础:
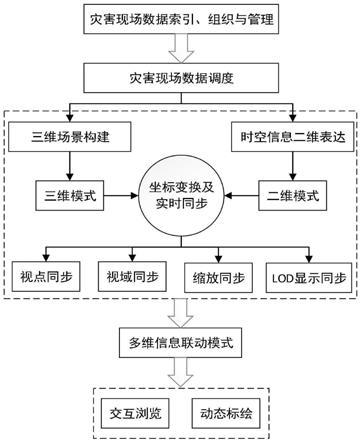
6.包括以下步骤:
7.s1:地下空间灾害现场数据索引、组织与管理;
8.s2:地下空间灾害现场数据调度;
9.s3:地下空间三维场景构建和二维场景构建;
10.s4:地下空间多维信息多屏联动;
11.s5:交互浏览和动态标绘;
12.三维场景构建包括:
13.s30:构建多源灾情信息时空统一基准框架;
14.s31:基于时空统一基准框架读取灾害现场视域范围内的各类数据;
15.s32:根据slam三维地物场景感知终端获取现场三维点云信息;
16.s33:构建地下空间灾害现场的三维场景,提出地下空间三维动态场景 的可视化方案,构建三维动态显示模式,三维场景以球面投影的形式;
17.s1和s2具体为:读取地下空间灾害现场综合态势数据,分析各类数据 的组织与管
理机制,针对移动对象构建动态定位数据库,建立移动对象 时空数据的高效时空一体化分布式存储和复合索引,实现灾害现场数据 的高效调度。
18.二维场景构建包括:采用s30~s32步骤中三维场景相同的系统构架, 根据需要调度和显示不同层级的二维场景,二维场景采取平面图的形式;
19.三维场景和二维场景通过坐标变换及交互事件触发机制实时同步;
20.坐标变换为通过坐标映射,使二维时空数据的地理坐标与三维场景的空 间位置相对应;
21.实时同步包括视点同步、视域同步、缩放同步和lod显示同步;
22.多维信息多屏联动通过监听视图的交互事件结合坐标动态联动算法实 时计算当前视图的位置信息经过消息队列转发到另一视图,对应的视图根 据收到的消息进行视图位置的更新,实现二三维视图窗口显示范围的同步;
23.坐标动态联动算法包括三维场景定位二维平面视图和二维平面地图定 位三维场景。
24.三维场景定位二维平面视图为通过三维场景定位二维平面地图,即通过 三维场景的视点位置、角度以及高度等姿态信息计算二维场景中心点的位 置和地图显示范围。
25.通过二维场景定位三维平面地图就是通过二维平面地图的中心点位置 和地图显示范围计算三维场景视点位置和姿态参数。
26.多维信息多屏联动以定义好的通信接口作为系统主框架和各个子功能 模块通信的桥梁,每个功能模块作为一个插件,遵循定义好的通信协议, 基于webgl地图引擎,底层代码由html和javascript实现。
27.子功能模块包括二维可视化系统和三维可视化系统。
28.二维可视化功能模块采用开源的leaflet.js插件,三维可视化功能模块采 用开源的cesium.js插件。
29.二维和三维灾情信息通过多屏幕的方式呈现。
30.灾情现场数据还包括温度、湿度、气压、气体种类。
31.本发明同现有技术相比,通过多屏联动机制建立的二维可视化和三维可 视化平台具有数据内容和服务内容上的一致性,通过二三维坐标转换联动 算法,使得在操作二维视图时会将地理坐标、视点角度及高度通过消息传 输模块传输到三维视图,三维视图根据收到的消息实时更新视角的空间坐 标,也可在操作三维视图时将三维信息通过消息传输模块传输到二维视图, 在二维视图和三维视图中都可以发出指令进行操作,并能保证二者显示的 内容和范围的一致性,即二维和二维、二维和三维及三维和三维都通过位 置信息共享实时多屏可视化,为地下空间智能服务提供了可视化的基础。
附图说明
32.图1为本发明的地下空间多维信息多屏联动可视化技术路线示意图。
33.图2为本发明的二三维坐标动态联动算法示意图。
34.图3为本发明的二三维多屏联动原理示意图。
35.图4为本发明的二三维多屏联动总体架构及功能结构示意图。
36.图5为本发明的二三维多屏联动效果示意图。
具体实施方式
37.现结合附图对本发明做进一步描述。
38.参见图1-图5,本发明提供一种地下空间多维灾情信息多屏联动可视化 方法:
39.包括以下步骤:
40.s1:地下空间灾害现场数据索引、组织与管理;
41.s2:地下空间灾害现场数据调度;
42.s3:地下空间三维场景构建和二维场景构建;
43.s4:地下空间多维信息多屏联动;
44.s5:交互浏览和动态标绘;
45.三维场景构建包括:
46.s30:构建多源灾情信息时空统一基准框架;
47.s31:基于时空统一基准框架读取灾害现场视域范围内的各类数据;
48.s32:根据slam三维地物场景感知终端获取现场三维点云信息;;
49.s33:构建地下空间灾害现场的三维场景,提出地下空间三维动态场景 的可视化方案,构建三维动态显示模式,三维场景以球面投影的形式;
50.s1和s2具体为:读取地下空间灾害现场综合态势数据,分析各类数据 的组织与管理机制,针对移动对象构建动态定位数据库,建立移动对象 时空数据的高效时空一体化分布式存储和复合索引,实现灾害现场数据 的高效调度。
51.二维场景构建包括:采用s30~s32步骤中三维场景相同的系统构架, 根据需要调度和显示不同层级的二维场景,二维场景采取平面图的形式;
52.三维场景和二维场景通过坐标变换及交互事件触发机制实时同步;
53.坐标变换为通过坐标映射,使二维时空数据的地理坐标与三维场景的空 间位置相对应;
54.实时同步包括视点同步、视域同步、缩放同步和lod显示同步;
55.多维信息多屏联动通过监听视图的交互事件结合坐标动态联动算法实 时计算当前视图的位置信息经过消息队列转发到另一视图,对应的视图根 据收到的消息进行视图位置的更新,实现二三维视图窗口显示范围的同步;
56.坐标动态联动算法包括三维场景定位二维平面视图和二维平面地图定 位三维场景。
57.三维场景定位二维平面视图为通过三维场景定位二维平面地图,即通过 三维场景的视点位置、角度以及高度等姿态信息计算二维场景中心点的位 置和地图显示范围。
58.通过二维场景定位三维平面地图就是通过二维平面地图的中心点位置 和地图显示范围计算三维场景视点位置和姿态参数。
59.多维信息多屏联动以定义好的通信接口作为系统主框架和各个子功能 模块通信的桥梁,每个功能模块作为一个插件,遵循定义好的通信协议, 基于webgl地图引擎,底层代码由html和javascript实现。
60.子功能模块包括二维可视化系统和三维可视化系统。
61.二维可视化功能模块采用开源的leaflet.js插件,三维可视化功能模块采 用开源的cesium.js插件。
62.二维和三维灾情信息通过多屏幕的方式呈现。
63.灾情现场数据还包括温度、湿度、气压、气体种类。
64.实施例(如图1所示):
65.(1)地下空间灾害现场数据接入
66.读取地下空间灾害现场综合态势数据,分析各类数据的组织与管理机 制,针对移动对象构建动态定位数据库,建立移动对象时空数据的高效时 空一体化分布式存储和复合索引,实现灾害现场数据的高效调度,地下空 间种类可以是地下车库,地下矿场,地下建筑,地铁隧道等地下空间,所 需要读取的灾害现场综合数据包括现场的温度、湿度、气压和气体种类等 各类信息。
67.(2)地下空间三维场景的构建
68.通过构建多源灾情信息时空统一基准框架,实现多源灾情信息的时空基 准、表达方式、尺度精度的多元特征归一化表达。基于统一的时空数据框 架读取灾害现场视域范围内的各类数据,根据slam三维地物场景感知终 端获取现场三维点云信息,构建地下空间灾害现场的三维场景,提出地下 空间三维动态场景的可视化方案,构建三维动态显示模式。
69.(3)地下空间二维场景构建
70.由于二三维多屏联动实现的基础是二维场景和三维场景必须视点视域 同步、lod缩放同步,因此二维场景不能简单的用同一个层级的场景,而是 根据需要调度和显示不同层级的二维场景。采用与三维场景相同的系统构 架,不同之处是三维场景以球面三维的形式需进行球面投影,而二维场景采 取平面图的形式。
71.(4)地下空间多维信息多屏联动显示
72.通过坐标映射,使二维时空数据的地理坐标与三维场景的空间位置相 对应,并通过交互式的事件触发机制保持同步。在视点视域同步、lod同步 等途径的支持下,多维信息多屏联动还将具备交互式浏览功能,以便于在 三维场景条件下实现灾害现场感知数据的实时动态跟踪。
73.地下空间多维信息多屏联动可视化,主要是指地下空间二维和三维的 可视化。三维场景展示采用计算机图形学技术,根据视觉原理将三维空间 投影在屏幕上,具有空间感、距离感、近大远小的透视特性等,从而模拟 出类似人眼视觉的效果。而二维地图是按照一定的数学和综合法则,将地 球表面投影到平面,使用符号表达对象的地理分布、组合以及相关二维平 面模型。然而地图投影会产生一定程度的变形,对于一定范围内的区域, 由于其采用了严密的数学模型,可以进行各种数学变换和操作,比如量测 距离、统计数据、空间分析关系等,二维和三维信息通过多屏幕的方式来 呈现,即二维一个屏幕,三维一个屏幕,二维和三维位置信息通过共享实 时多屏可视化。
74.如图3所示,二三维多屏联动可视化的原理,是通过消息的互响应机 制来实现的,通过监听视图的交互事件结合坐标动态联动算法实时计算当 前视图的位置信息经过消息队列转发到另一视图,对应的视图根据收到的 消息进行视图位置的更新,实现二三维视图窗口显示范围的同步。
75.标动态联动算法包括两个部分:
76.(1)三维场景定位二维平面视图(如图2所示)
77.通过三维场景定位二维平面地图就是通过三维场景的视点位置、角度 以及高度
务提供了可视化的基础。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
