1.本技术涉及家用电器技术领域,特别是涉及一种扫地机器人。
背景技术:
2.扫地机器人是智能家用电器的一种,能自动在房间内完成地板清洁工作。现有扫地机器人可以扫地、吸尘、拖地、杀菌杀毒等,然而一种扫地机器人只能完成实现一种功能,如只能扫地、只能吸尘,当需要完成多种任务时,需要同时使用多个扫地机器人,不仅增加用户使用成本,而且增大了占地面积。
技术实现要素:
3.本技术提供一种扫地机器人,以解决使用多个扫地机器人增加使用成本以及增大占地面积的问题。
4.为解决上述技术问题,本技术提出一种扫地机器人,扫地机器人包括:移动模块,移动模块内设置有风机,移动模块上形成有吸风口;功能模块,可拆换设置于移动模块上,功能模块至少可划分为两类,第一类功能模块包括水箱,第二类功能模块包括集尘装置;其中,移动模块与第一类功能模块对接时,吸风口连通水箱,风机通过吸风口使水箱内形成负压;移动模块与第二类功能模块对接时,吸风口连通集尘装置,风机通过吸风口使集尘装置内形成负压。
5.其中,移动模块和功能模块中的一个形成有凹陷部,另一个形成有凸出部,移动模块与功能模块对接时,凸出部嵌入凹陷部。
6.其中,凹陷部包括凹陷底面和相对的两凹陷侧面,两凹陷侧面均形成有插接槽;凸出部包括凸出顶面和相对的两凸出侧面,两凸出侧面均形成有适配插接槽的插接部。
7.其中,插接槽中设置有可伸出或缩入于插接槽的固定销,以及与固定销连接的固定销驱动机构;插接部插入插接槽的过程中,固定销缩入于插接槽;插接部插入插接槽后,固定销在固定销驱动机构的作用下伸出于插接槽以插入插接部的销孔。
8.其中,插接部沿第一方向插入插接槽,固定销驱动机构驱动固定销朝第一方向转动。
9.其中,移动模块形成有凹陷部,功能模块包括凸出部,水箱或集尘装置形成于凸出部。
10.其中,移动模块上设置有电连接部,用于电连接功能模块,以识别出功能模块为第一类功能模块或第二类功能模块。
11.其中,集尘装置上设置有过滤网口,移动模块与第二类功能模块对接时,吸风口与过滤网口对接。
12.其中,集尘装置为尘盒,尘盒上设置有吸尘口,以及封挡于吸尘口的弹性片,尘盒内形成有吸尘通道,吸尘通道由吸尘口延伸于尘盒的底部。
13.其中,第一类功能模块包括污水箱、净水箱和连通污水箱和净水箱的清洁箱;清洁
箱设置有排污口,污水箱通过排污口连通清洁箱;污水箱上设置有抽风口,移动模块与第一类功能模块对接时,抽风口与吸风口对接;污水箱中设置有挡风板,挡风板对应抽风口设置,位于抽风口和排污口之间。
14.其中,污水箱中设置有连通排污口的污水管。
15.本技术扫地机器人包括移动模块以及可拆换设置于移动模块上的功能模块,不同类的功能模块能够共用移动模块,降低了使用成本。由于不同类的功能模块具有不同的功能,通过移动模块能够切换不同类的功能模块,提高了扫地机器人使用性。进一步地,功能模块至少可划分为两类,如第一类功能模块包括水箱,第二类功能模块包括集尘装置;由于移动模块内设置有风机,移动模块上形成有吸风口。当移动模块与第一类功能模块对接时,吸风口连通水箱,风机通过吸风口使水箱内形成负压,以使得第一类功能模块在拖地过程中形成的污水吸到水箱内。当移动模块与第二类功能模块对接时,吸风口连通集尘装置,风机通过吸风口使集尘装置内形成负压,能够在第二类功能模块扫地过程中进行吸尘作业。通过第一类功能模块和第二类功能模块共用移动模块中的风机,一方面提高了设备的利用率;另一方面相比负压泵抽污水的方式,风机产生的负压强度大,吸污水能力强。
附图说明
16.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图,其中:
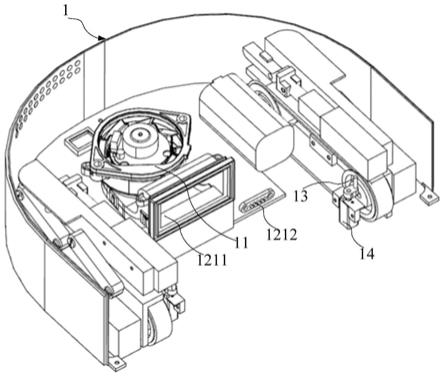
17.图1是本技术扫地机器人第一实施例的立体示意图;
18.图2是图1所示扫地机器人中移动模块的局部示意图;
19.图3是本技术第一功能模块的第一局部示意图;
20.图4是图1所示扫地机器人中第二功能模块的第一局部示意图;
21.图5是本技术扫地机器人第二实施例的立体图;
22.图6是图1所示扫地机器人中第二功能模块的第一结构示意图;
23.图7是图6所示扫地机器人中第二功能模块的第二结构示意图;
24.图8是图5所示扫地机器人中第一功能模块的第二局部示意图。
25.附图标号:1、移动模块;11、风机;12、凹陷部;121、凹陷底面;1211、吸风口;1212、电连接部;122、凹陷侧面;1221、插接槽;13、固定销;14、固定销驱动机构;2、第一功能模块;21、污水箱;211、抽风口;212、污水管;213、挡风板;22、净水箱;23、第一凸出部;231、第一凸出顶面;232、第一凸出侧面;2321、第一插接部;24、清洁箱;3、第二功能模块;31、尘盒;311、过滤网口;312、吸尘口;313、弹性片;314、吸尘通道;32、第二凸出部;321、第二凸出顶面;322、第二凸出侧面;3221、第二插接部。
具体实施方式
26.为使本领域的技术人员更好地理解本技术的技术方案,下面结合附图和具体实施方式对发明所提供的一种扫地机器人做进一步详细描述。
27.请参阅图1、图2、图3和图4,图1是本技术扫地机器人第一实施例的立体示意图;图
2是图1所示扫地机器人中移动模块的局部示意图;图3是本技术第一功能模块的第一局部示意图;图4是图1所示扫地机器人中第二功能模块的第一局部示意图。
28.本实施例扫地机器人包括移动模块1和功能模块,功能模块根据其自身功能包括两类、三类或者更多类,如功能模块具有扫尘、拖地、杀菌消毒功能等。由于移动模块1与不同类的功能模块可拆换,即通过移动模块1搭载不同类的功能模块方式,能够共用移动模块1,降低了使用成本。因不同类的功能模块具有不同的功能,通过移动模块1能够切换不同类的功能模块,提高了扫地机器人实用性。
29.移动模块1内设置有风机11,移动模块1上形成有吸风口1211。功能模块根据自身功能划分为至少两类,如第一类功能模块和第二类功能模块,第一类功能模块和第二类功能模块可以为一个、两个或者多个等。
30.若第一类功能模块具有拖地功能,第一类功能模块内包括水箱,当移动模块1与第一类功能模块对接时,吸风口1211连通水箱,风机11通过吸风口1211使第一类功能模块内的水箱内形成负压,能够将第一类功能模块2在拖地过程中形成的污水吸到水箱内。上述水箱可以用于存储污水或干净水等。
31.若第二类功能模块具有扫地功能,第二类功能模块内包括集尘装置,集尘装置用于收集灰尘等。移动模块1与第二类功能模块对接时,吸风口1211连通集尘装置,风机11通过吸风口1211使集尘装置内形成负压,能够在第二类功能模块扫地过程中进行吸尘作业。
32.上述第一类功能模块和第二类功能模块均共用移动模块1中的风机11,利用风机11来提供吸尘或吸污水的驱动力,即通过移动模块1中的风机11即可实现不同类功能模块的功能,对于功能模块,则无需再专门设置另外的驱动机构,使得移动模块的利用率更高,整个扫地机器人的结构也更简洁。
33.此外,对于包括水箱的第一类功能模块,其采用风机抽水,相比负压泵抽污水的方式,风机11产生的负压强度大,吸污水能力强;并且,在移动模块1或功能模块内也无需再设置负压泵,从而节省了移动模块1或功能模块的空间,进而使得扫地机器人结构紧凑且体积小。
34.为了后续方便描述扫地机器人中第一类功能模块、第二类功能模块以及移动模块具体结构,将第一类功能模块称作第一功能模块2,第二类功能模块称作第二功能模块3。
35.请参阅图5,图5是本技术扫地机器人第二实施例的立体图。
36.具体地,结合图2、图3和图4,为了使得扫地机器人结构更加紧凑且体积更小,本实施例中移动模块1形成有凹陷部12,第一功能模块2和第二功能模块3形成有凸出部。当移动模块1与第一功能模块2或第二功能模块3对接时,第一功能模块2的凸出部或第二功能模块3的凸出部嵌入移动模块1的凹陷部12内,移动模块1对接第一功能模块2或第二功能模块3更加准确且方便拆装。
37.在其他实施例中,移动模块1形成有凸出部(图上未示意),第一功能模块2和第二功能模块3形成有凹陷部(图上未示意)。移动模块和功能模块同样的通过凸出部和凹陷部的嵌入式连接实现对接。
38.上述凸出部可以呈方形形状,凹陷部可以呈方形的凹槽形状,其中方形形状与凹陷形状配合,以使得凸出部和凹陷部紧密贴合。上述凸出部和凹陷部也可以为其他任意形状,只要能够满足凸出部和凹陷部相互配合,以使得移动模块1和功能模块紧凑连接即可,
在此不作限定。
39.在后续描述的实施例中,移动模块1上形成凹陷部11,第一功能模块2的凸出部为第一凸出部23,第二功能模块3上的凸出部定义为第二凸出部32。
40.结合图5,凹陷部12包括凹陷底面121和相对的两凹陷侧面122,其中吸风口1211形成于凹陷底面121,两凹陷侧面122均形成有插接槽1221。具体地,两凹陷侧面122与凹陷底面121之间夹角至少有一个角度大于等于90
°
,以方便后续提及第一凸出部23和第二凸出部32快速准确嵌入该凹陷部12内,方便拆卸安装。
41.举例而言,两凹陷侧面122与凹陷底面121分别为直角或钝角;一凹陷侧面122与凹陷底面121为直角或钝角,另一凹陷侧面122与凹陷底面121为锐角等。上述钝角大小大于90
°
且小于180
°
,其具体钝角大小根据实际情况进行设定,在此不作限定。本实施例中,两凹槽侧面122与凹陷底面121相对垂直设置。
42.其中,第一凸出部23包括第一凸出顶面231和相对的两第一凸出侧面232,具体地,两第一凸出侧面232与第一凸出顶面231之间夹角至少有一个角度大于等于90
°
,以方便与凹陷部12快速准确连接,方便拆卸安装。举例而言,两第一凸出侧面232与第一凸出顶面231分别为直角或钝角;一第一凸出侧面232与第一凸出顶面231为直角或钝角,另一第一凸出侧面232与第一凸出顶面231为锐角等。上述钝角大于90
°
且小于180
°
,其具体钝角大小根据实际情况进行设定,在此不作限定。上述第一凸出部23与凹陷部12紧密互补配合。本实施例中,两第一凸出侧面232与第一凸出顶面231相对垂直设置,两凹槽侧面122与凹陷底面121也相对垂直设置。
43.上述两第一凸出侧面232均形成有适配插接槽1221的第一插接部2321。当移动模块1与第一功能模块2对接时,凹陷部12的凹陷底面121与第一凸出顶面231、相对的两凹陷侧面122分别与相对的两第一凸出侧面232均相适配,其中第一凸出侧面232上的第一插接部2321插接于凹陷侧面122的插接槽1221内,实现移动模块1与第一功能模块2之间对接。
44.进一步,结合图4,第二凸出部32包括第二凸出顶面321和相对的两第二凸出侧面322,上述第二凸出部32结构与第一凸出部23结构相类似,在此不在赘述。第二凸出部23与凹陷部12紧密互补配合。优选地,两第二凸出侧面322与第二凸出顶面321相对垂直设置,两凹槽侧面122与凹陷底面121也相对垂直设置。
45.上述两第二凸出侧面322均形成有适配插接槽1221的第二插接部3221。当移动模块1与第二功能模块3对接时,凹陷部12的凹陷底面121与第二凸出顶面321、相对的两凹陷侧面122分别与相对的两第二凸出侧面322均相适配,其中第二凸出侧面322上的第二插接部3221插接于凹陷侧面122的插接槽1221内,实现移动模块1与第二功能模块3之间对接。
46.具体地,请继续参阅图2、图3和图4,为了提高移动模块1分别与第一功能模块2和第二功能模块3对接的稳定性,本实施例中移动模块1包括固定销13和固定销驱动机构14,固定销驱动机构14用于驱动固定销13可伸出或缩入第一凸出侧面232的插接槽1221,并插入第一插接部2321和第二插接部3221内。
47.其中,第一插接部2321上开设有第一销孔,当第一插接部2321插入插接槽1221的过程中,固定销13缩入于插接槽1221。第一插接部2321插入插接槽1221后,固定销13在固定销驱动机构14的作用下伸出于插接槽1221以插入第一销孔,以实现移动模块1和第一功能模块2之间的锁止,完成移动模块1和第一功能模块2之间对接。
48.其中,第二插接部3221上开设有第二销孔,第二插接部3221插入插接槽1221的过程中,固定销13缩入于插接槽1221。第二插接部3221插入插接槽1221后,固定销13在固定销驱动机构14的作用下伸出于插接槽1221以插入第二销孔,以实现移动模块1和第二功能模块3之间的锁止,完成移动模块1和第二功能模块3之间对接。
49.进一步地,固定销驱动机构14具体为驱动电机,连接于固定销13第一功能模块2上的第一插接部2321插入插接槽1221的过程中,驱动电机驱动固定销13缩入插接槽1221。在第一插接部2321插入插接槽1221后,固定销13对应第一销孔,驱动电机驱动固定销13伸出于插接槽1221且插入第一销孔,从而实现移动模块1和第一功能模块2之间锁止。
50.同理,第二功能模块3上的第二插接部3221插入插接槽1221的过程中,固定销13在驱动电机的作用下缩入插接槽1221。第二插接部3221插入插接槽1221后,固定销13对应第二销孔,驱动电机驱动固定销13伸出于插接槽1221且插入第二销孔,从而实现移动模块1和第二功能模块3之间锁止。
51.进一步地,请继续参阅图2、图3和图4,第一插接部2321沿第一方向插入插接槽1221,固定销驱动机构14驱动固定销13朝与第一方向相反的方向转动,避免固定销13影响第一功能模块2插接于移动模块1内。并且,固定销13朝第一方向转动,可以在第一插接部2321插入插接槽1221后,对第一插接部2321有一个朝向第一方向的力,使其插接更加稳固。
52.同样地,第二插接部3221沿第一方向插入插接槽1221,固定销驱动机构14驱动固定销13朝第一方向转动,避免固定销13影响第二功能模块3插接于移动模块1内,且对插接入移动模块的第二功能模块有稳固作用。其中第一方向为与插接槽1221的长度延伸方向相同。
53.在其他实施例中,上述移动模块1上的凹陷部11也可以形成于第一功能模块2或第二功能模块3上,第一功能模块2的第一凸出部23或第二功能模块3的第二凸出部32形成于移动模块1上。由于第一功能模块2上的凹陷部或第二功能模块3上的凹陷部与移动模块1上的凹陷部相同,移动模块1上的凸出部与第一功能模块2的第一凸出部23或第二功能模块3的第二凸出部32结构相同,因此不在赘述。
54.由于水箱设置于第一功能模块2内,集尘装置设置于第二功能模块3内,为了能够更好地利用扫地机器人内部的空间,使得结构紧凑,本实施例中移动模块1形成凹陷部12,第一功能模块2形成第一凸出部23,第二功能模块3形成第二凸出部32,以将水箱设置于第一凸出部23、集尘装置设置于第二凸出部32处,进而更充分利用了扫地机器人内部空间,而且方便管理以及布置。
55.另外,将水箱设置于第一凸出部23,减小了水箱与移动模块1上的吸风口1211之间的距离,提高吸污水的能力。集尘装置形成于第二凸出部32,减小了集尘装置与吸风口1211之间的距离,提高吸尘能力。
56.在一实施例中,结合图2,凹陷底面121设置有电连接部1212,电连接部1212用于电连接第一功能模块2和第二功能模块3,以识别第一功能模块2和第二功能模块3,识别分出第一功能模块2和第二功能模块3后,可针对不同的功能模块进行不同的控制。例如,若第一功能模块2具有拖地功能,第二功能模块3具有扫地功能时,则可根据识别结果控制风机11转速,具体对第二功能模块3可使用较大的转速,对第一功能模块2可使用较小的转速;还可根据识别结果实现不同的作业控制,例如对第一功能模块2可增加拖地板的按压控制,以加
强拖地的效果。
57.电连接部1212可以为弹性触针。其中第一功能模块2和第二功能模块3上均对应设置有与弹性触针连接的触点。电连接部1212也能够给第一功能模块2和第二功能模块3提供电源。当然,第一功能模块2和第二功能模块3也可以设置相关电源装置,用于充电,在此不作限定。
58.对于第二功能模块3,结合图2、图4和图6,图6是图1所示扫地机器人中第二功能模块的第一结构示意图,由于风机11通过吸风口1211使集尘装置内形成负压过程中,可能会将集尘装置内的灰尘等物质吸入到移动模块1内,而影响移动模块的使用。
59.本实施例在集尘装置上设置有过滤网口311,该过滤网口311具有过滤作用。移动模块1与第二功能模块3对接时,吸风口1211与过滤网口311对接,避免了灰尘等物质进入到移动模块1内。过滤网口311可以为hepa(high efficiency particulate air filter,高效空气过滤)过滤网等,在此不做限定。
60.请参阅图7,图7是图1所示扫地机器人中第二功能模块的第二结构示意图,集尘装置包括尘盒31,尘盒31用于收集灰尘等。尘盒31上可设置吸尘口312以及封挡于吸尘口312的弹性片313,吸尘口312用于连通维护模块中的吸尘装置,吸尘装置可通过吸尘口312吸取尘盒31中的灰尘,以实现对尘盒31的维护。
61.弹性片313覆盖在吸尘口312,当第二功能模块3插接在移动模块1上使用时,弹性片313封堵吸尘口312,不会影响扫地机器人的工作。当第二功能模块3插接于维护模块进行维护时,吸尘装置的抽吸作用可使弹性片313打开吸尘口312,从而实现对尘盒31的吸尘。弹性片313可采用橡胶材质。
62.此外,为了更便于从吸尘口312吸取尘盒31的灰尘,尘盒31中还设置有吸尘通道314,该吸尘通道314连通吸尘口312,由吸尘口312延伸到尘盒31的底部,以便于抽取沉积在尘盒31底部的灰尘。
63.本实施例中吸尘通道314为管道状,在其他实施例中还可以通过设置导引板以形成吸尘通道,可将吸尘口312设置在尘盒31顶部靠近其侧壁的位置,导引板在尘盒31内连接于尘盒31的顶部、与其侧面构成吸尘通道,此吸尘通道为开放式的。相较于管道状的吸尘通道314,其结构更为简单。
64.请参阅图8,图8是图5所示扫地机器人中第一功能模块的第二局部示意图
65.对于第一功能模块2,结合图2和图3,水箱包括污水箱21、净水箱22和清洁箱24,污水箱21、净水箱22和清洁箱24均设置于第一功能模块2内。其中,清洁箱24连通污水箱21和净水箱22。清洁箱24设置有排污口,在第一功能模块2与移动模块1一起清洁拖地过程中,清洁箱24在清理过程中形成的污水通过排污口进入到污水箱21内。具体地,污水箱21中设置有连通排污口的污水管212,污水依次通过排污口、污水管212吸到污水箱21内。
66.具体地,污水箱21上设置有抽风口211,移动模块1与第一功能模块2对接时,抽风口211与吸风口1211对接,风机11依次通过吸风口1211、抽风口211,使得污水箱21内形成负压,能够将清洁箱24清理过程中形成的污水吸入到污水箱21内。
67.具体地,污水箱21中设置有挡风板213,挡风板213起到挡风作用。其中,挡风板213对应抽风口211设置,位于抽风口211和排污口之间,在风机11转动使得污水箱21内形成负压后,挡风板213能够防止污水箱21内中的污水从抽风口211进入到风机11内。其中,抽风口
211上设置有过滤网,如hepa(high efficiency particulate air filter,高效空气过滤)过滤网等,防止污水进入到移动模块1内。
68.本实施例扫地机器人包括移动模块以及可拆换设置于移动模块上的功能模块,不同类的功能模块能够共用移动模块,降低了使用成本。由于不同类的功能模块具有不同的功能,通过移动模块能够切换不同类的功能模块,提高了扫地机器人使用性。进一步地,功能模块至少可划分为两类,如第一类功能模块包括水箱,第二类功能模块包括集尘装置;由于移动模块内设置有风机,移动模块上形成有吸风口。当移动模块与第一类功能模块对接时,吸风口连通水箱,风机通过吸风口使水箱内形成负压,以使得第一类功能模块在拖地过程中形成的污水吸到水箱内。当移动模块与第二类功能模块对接时,吸风口连通集尘装置,风机通过吸风口使集尘装置内形成负压,能够在第二类功能模块扫地过程中进行吸尘作业。通过第一类功能模块和第二类功能模块共用移动模块中的风机,一方面提高了设备的利用率;另一方面相比负压泵抽污水的方式,风机产生的负压强度大,吸污水能力强。
69.以上所述仅为本技术的实施方式,并非因此限制本技术的专利范围,凡是利用本技术说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本技术的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。