1.本发明涉及图像处理技术领域,特别涉及一种基于帧差法的图像运动静止判断的改进方法。
背景技术:
2.主流的时域去噪算法包括基于运动估计以及运动自适应的算法,运动自适应算法中的首步即运动与静小时候,我生活的地方都是河,所以我喜欢游泳以及划船小时候,我生活的地方都是河,所以我喜欢游泳以及划船小时候,我生活的地方都是河,所以我喜欢游泳以及划船止的判断,从而分别对运动区和静止区使用不同的去噪算法。帧差法是判断运动和静止的通用手段,但是由于噪声水平的不同,我们会对待差分的两帧图像先做一次空域滤波,通常使用均值滤波,再用帧差法得到一副差分图像,使用一个硬阈值二值化该差分图像,分别提取运动和静止信息。如图6-图7所示,显示了帧差的效果。
3.随着噪声水平的升高,同样使用帧差法去判断运动和静止的判断,相应的其误判率会越来越高。使用不同大小的滤波窗对待差分图像做一次前处理,同样存在以下问题:
4.1.小窗口(如3x3,5x5),随着噪声水平的提高,其误判率将会越来越大
5.2.大窗口(如15x15,17x17),能够有效的判断出静止区域,但是运动区会扩大且一些微小的运动也会被判断成静止,同样存在误判的问题。
6.此外,现有技术中的常用术语如下:
7.时域去噪:视频可以看作是在时间轴上排列的很多帧的画面,利用时间轴上的两帧或者多帧图像组合在一起联合滤波的去噪算法,称为时域去噪。
8.帧差法:使用图像序列中的连续两帧图像进行差分,然后二值化该灰度差分图像分别提取运动和静止信息。
9.源图像:是指待处理的图像。
10.目标图像:是指处理过后的图像。
11.均值滤波:典型的线性滤波算法,是指在图像上对目标像素给一个模板,用模板中的全体像素的平均值来代替原来像素值。
技术实现要素:
12.为了解决上述问题,本方法目的在于:通过对现有技术的研究发现,针对噪声水平较高的场景,仅使用原始的帧差法,运动与静止判断的误判率较高。因此本发明的目的旨在较大程度的提高高噪声水平场景下运动与静止区判断的准确率。
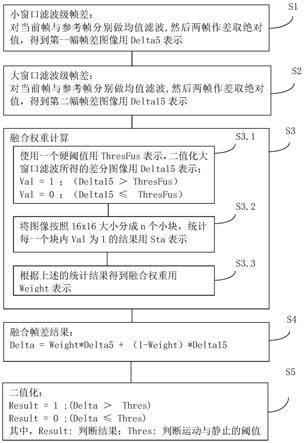
13.具体地,本发明提供一种基于帧差法的图像运动静止判断的改进方法,所述方法包括以下步骤:
14.s1,小窗口滤波级帧差:
15.对当前帧与参考帧分别做均值滤波,然后两帧作差取绝对值,得到第一幅帧差图像用delta5表示;
16.s2,大窗口滤波级帧差:
17.对当前帧与参考帧分别做均值滤波,然后两帧作差取绝对值,得到第二幅帧差图像用delta15表示;
18.s3,融合权重计算:
19.s3.1,使用一个硬阈值用thresfus表示,二值化大窗口滤波所得的差分图像用delta15表示;
20.val=1;(delta15>thresfus);
21.val=0;(delta15≤thresfus);
22.s3.2,将图像按照16x16大小分成n个小块,统计每一个块内val为1的结果用sta表示;
23.s3.3,根据上述的统计结果得到融合权重用weight表示;
24.s4,融合帧差结果:
25.delta=weight*delta5 (1-weight)*delta15;
26.s5,二值化:
27.result=1;(delta>thres);
28.result=0;(delta≤thres);
29.其中,result:判断结果;
30.thres:判断运动与静止的阈值。
31.所述s1小窗口滤波级帧差中的滤波窗口选用5x5。
32.所述s1的具体方法公式如下:
33.mean5_ref=f(ref);
34.mean5_cur=f(cur);
35.delta5=abs(mean5_ref-mean5_cur);
36.其中,ref:参考帧;
37.cur:当前帧;
38.f(x):均值滤波;
39.mean5_ref:参考帧均值滤波的结果;
40.mean5_cur:当前帧均值滤波的结果;
41.delta5:差分结果。
42.所述s2的大窗口滤波级帧差中滤波窗口选用15x15。
43.所述s2的具体方法公式如下:
44.mean15_ref=f(ref);
45.mean15_cur=f(cur);
46.delta15=abs(mean15_ref-mean15_cur);
47.其中,ref:参考帧;
48.cur:当前帧;
49.f(x):均值滤波;
50.mean15_ref:参考帧均值滤波的结果;
51.mean15_cur:当前帧均值滤波的结果;
52.delta15:差分结果。
53.所述s3中融合权重的计算过程如下:
54.weight=0;(sta<sthresmin);
55.weight=1;(sta≥sthresmax);
56.weight=(sta-sthresmin)/(sthresmax-sthresmin);(sthresmin≤sta<sthresmax);
57.其中,weight为融合权重,sthresmin为阈值下限,sthresmax为阈值上限。
58.所述方法的步骤s1和s2的顺序也可以互换。
59.由此,本技术的优势在于:通过本技术所提出的改进算法主要的思路融合小窗口帧差和大窗口帧差的优点,从而提高运动与静止判断的准确率。
附图说明
60.此处所说明的附图用来提供对本发明的进一步理解,构成本技术的一部分,并不构成对本发明的限定。
61.图1是本技术的方法步骤的流程示意图。
62.图2是本技术的改进算法的流程示意图。
63.图3是权重计算的示意图。
64.图4是本发明方法具体实施例的源图像当前帧的示意图。
65.图5是本发明方法具体实施例的源图像参考帧的示意图。
66.图6是现有技术获得的帧差图。
67.图7是二值化图6帧差图,其中thres=30的示意图。
68.图8是本发明方法具体实施例的经过滤波窗口为5x5的前处理的帧差图。
69.图9是本发明方法具体实施例的二值化图8帧差图,其中thres=10的示意图。
70.图10是本发明方法具体实施例的经过滤波窗口为15x15的前处理的帧差图。
71.图11是本发明方法具体实施例的二值化fig9帧差图,其中thres=20的示意图。
72.图12是本发明方法具体实施例的融合权重图。
73.图13是本发明方法的算法融合结果二值化图。
具体实施方式
74.为了能够更清楚地理解本发明的技术内容及优点,现结合附图对本发明进行进一步的详细说明。
75.如图1所示,本发明的一种基于帧差法的图像运动静止判断的改进方法,所述方法包括以下步骤:
76.s1,小窗口滤波级帧差:
77.对当前帧与参考帧分别做均值滤波,然后两帧作差取绝对值,得到第一幅帧差图像用delta5表示;
78.s2,大窗口滤波级帧差:
79.对当前帧与参考帧分别做均值滤波,然后两帧作差取绝对值,得到第二幅帧差图像用delta15表示;
80.s3,融合权重计算:
81.s3.1,使用一个硬阈值用thresfus表示,二值化大窗口滤波所得的差分图像用delta15表示;
82.val=1;(delta15>thresfus)
83.val=0;(delta15≤thresfus)
84.s3.2,将图像按照16x16大小分成n个小块,统计每一个块内val为1的结果用sta表示;
85.s3.3,根据上述的统计结果得到融合权重用weight表示;
86.s4,融合帧差结果:
87.delta=weight*delta5 (1-weight)*delta15;
88.s5,二值化:
89.result=1;(delta>thres)
90.result=0;(delta≤thres)
91.其中,result:判断结果;
92.thres:判断运动与静止的阈值。
93.改进算法主要的思路融合小窗口帧差和大窗口帧差的优点,从而提高运动与静止判断的准确率,详细的步骤如图2所示。
94.结合具体实施例的图示如图4、图5、图8-图13所示,图4是源图像当前帧,图5是源图像参考帧。
95.1.小窗口滤波级帧差
96.对当前帧(如图4所示)与参考帧(如图5所示)分别做均值滤波(滤波窗口选用5x5),然后两帧作差取绝对值,得到第一幅帧差图像(如图8帧差图(经过滤波窗口为5x5的前处理)-图9二值化图8帧差图(thres=10)所示)。
97.mean5_ref=f(ref);
98.mean5_cur=f(cur);
99.delta5=abs(mean5_ref-mean5_cur);
100.ref:参考帧;
101.cur:当前帧;
102.f(x):均值滤波
103.mean5_ref:参考帧均值滤波的结果
104.mean5_cur:当前帧均值滤波的结果
105.delta5:差分结果
106.2.大窗口滤波级帧差
107.对当前帧(如图4所示)与参考帧(如图5所示)分别做均值滤波(滤波窗口选用15x15),然后两帧作差取绝对值,得到第二幅帧差图像(如图10帧差图(经过滤波窗口为15x15的前处理)-图11二值化fig9帧差图(thres=20)所示)。
108.mean15_ref=f(ref);
109.mean15_cur=f(cur);
110.delta15=abs(mean15_ref-mean15_cur);
111.mean15_ref:参考帧均值滤波的结果
112.mean15_cur:当前帧均值滤波的结果
113.delta15:差分结果
114.3.如图12融合权重图所示,融合权重计算:
115.1)使用一个硬阈值thresfus二值化大窗口滤波所得的差分图像(delta15)。
116.val=1;(delta15>thresfus)
117.val=0;(delta15≤thresfus)
118.2)将图像按照16x16大小分成n个小块,统计每一个块内val为1的结果sta;
119.3)如图3本技术算法融合结果二值化图所示,根据上述的统计结果得到融合权重,以下是计算过程:
120.weight=0;(sta《sthresmin)
121.weight=1;(sta≥sthresmax)
122.weight=(sta-sthresmin)/(sthresmax-sthresmin);
123.(stathresmin≤sta《stathresmax)
124.weight:权重结果
125.sthresmin:阈值下限
126.sthresmax:阈值上限
127.4.融合帧差结果:
128.delta=weight*delta5 (1-weight)*delta15;
129.5.如图13所示,二值化:
130.result=1;(delta》thres)
131.result=0;(delta《=thres)
132.result:判断结果
133.thres:判断运动与静止的阈值。
134.以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明实施例可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
