1.本发明属于空间位置精密稳定技术领域,具体涉及一种双级多自由度空间位置精密稳定系统。
背景技术:
2.目前随着先进制造技术的发展,面向纳米级定位控制以及对材料或器件的纳米级操作的高端装备日益得到广泛的关注。基于直线位驱动领域的需求升级和技术快速迭代,滚珠丝杠等传统执行机构由于其传动链较长、系统累计误差大,导致传动精度和响应速度已经不能满足现有的精密直线驱动需求。
3.同时,机械振动对光学系统的成像质量、测量精度和目标跟踪瞄准精度的影响是不可避免的。目前主流的隔振方法可分为主动隔振和被动隔振,然而主动隔振和被动隔振均是对于仪器设备与地基之间的振动进行隔绝,区别在于振动源形式不同。然而对于隔振链末端光学仪器设备(激光器等),并不能很好的实现空间范围内的振动或扰动隔绝,所以需要一种用来稳定光学仪器设备的空间位置精密稳定系统。
技术实现要素:
4.本发明提供了一种双级多自由度空间位置精密稳定系统,用于解决上述提到的技术问题,具体采用如下的技术方案:
5.一种双级多自由度空间位置精密稳定系统,包含:
6.运动平台;
7.二级平台,连接至运动平台且位于运动平台的下方,二级平台设有第二电磁驱动组件以通过电磁致动的方式在多个方向上调节运动平台的位置;
8.一级平台,连接至二级平台且位于二级平台的下方,一级平台设有第一电磁驱动组件以通过电磁致动的方式在多个方向上调节二级平台,从而调节运动平台的位置;
9.控制器,用于连接至第一电磁驱动组件和第二电磁驱动组件以控制第一电磁驱动组件和第二电磁驱动组件。
10.进一步地,二级平台在第二电磁驱动组件的驱动下能够在x轴、y轴和z轴三个方向上调节运动平台的位置;
11.一级平台在第一电磁驱动组件的驱动下能够在x轴、y轴和z轴三个方向上调节二级平台从而调节运动平台的位置。
12.进一步地,第一电磁驱动组件包含电磁致动单元一、电磁致动单元二和电磁致动单元三;
13.一级平台包含:
14.一级底板;
15.一级z轴运动单元,沿z轴方向可动连接至一级底板,一级z轴运动单元和一级底板之间设有驱动一级z轴运动单元沿z轴方向运动的电磁致动单元一;
16.一级y轴运动单元,沿y轴方向可动连接至一级z轴运动单元,一级y轴运动单元和一级z轴运动单元之间设有驱动一级y轴运动单元沿y轴方向运动的电磁致动单元二;
17.一级x轴运动单元,沿x轴方向可动连接至一级y轴运动单元,一级y轴运动单元上设有引导槽,二级平台的底部设有与引导槽配合的引导凸起,引导凸起和引导槽之间设有驱动二级平台沿x轴方向运动的电磁致动单元三。
18.进一步地,一级底板设有u型槽一,一级z轴运动单元设有与u型槽一配合的引导条一,u型槽一和引导条一之间设有电磁致动单元一;
19.一级z轴运动单元设有u型槽二,一级y轴运动单元设有与u型槽二配合的引导条二,u型槽二和引导条二之间设有电磁致动单元二。
20.进一步地,第二电磁驱动组件包含电磁致动单元四、电磁致动单元五和电磁致动单元六;
21.二级平台包含:
22.二级底板,其底部设有引导凸起,引导凸起和引导槽之间还设有用于驱动二级底板沿z轴方向运动的电磁致动单元四;
23.二级y轴运动单元,沿y轴方向可动连接至二级底板,二级y轴运动单元和二级底板之间设有驱动二级y轴运动单元沿y轴方向运动的电磁致动单元五;
24.二级x轴运动单元,沿x轴方向可动连接至二级y轴运动单元,二级x轴运动单元和二级y轴运动单元之间设有驱动二级x轴运动单元沿x轴方向运动的电磁致动单元六,运动平台连接至二级x轴运动单元。
25.进一步地,二级底板设有u型槽三,二级y轴运动单元设有与u型槽三配合的引导条三,u型槽三和引导条三之间设有电磁致动单元五;
26.二级y轴运动单元设有u型槽四,二级x轴运动单元与u型槽四配合,u型槽四和二级x轴运动单元之间设有电磁致动单元六。
27.进一步地,u型槽一和引导条一之间设有用于检测一级底板和一级z轴运动单元之间相对位置的光栅尺传感器一;
28.u型槽二和引导条二之间设有用于检测一级z轴运动单元和一级y轴运动单元之间相对位置的光栅尺传感器二;
29.引导凸起和引导槽内设有用于检测一级y轴运动单元和二级底板之间的x轴方向相对位置的光栅尺传感器三和用于检测一级y轴运动单元和二级底板之间的z轴方向相对位置的光栅尺传感器四。
30.u型槽三和引导条三之间设有用于检测二级底板和二级y轴运动单元之间位置关系的光栅尺传感器五;
31.u型槽四和二级x轴运动单元之间设有用于检测二级y轴运动单元和二级x轴运动单元之间位置关系的光栅尺传感器六。
32.进一步地,双级多自由度空间位置精密稳定系统还包含:
33.检测单元,用于检测运动平台的位置变化量;
34.当检测单元检测到的运动平台的位置变化量达到预设值时,控制器控制第一电磁驱动组件以调节运动平台;
35.当检测单元检测到的运动平台的位置变化量未达到预设值时,控制器控制第二电
磁驱动组件以调节运动平台。
36.进一步地,双级多自由度空间位置精密稳定系统还包含:
37.检测单元,用于检测运动平台在x轴、y轴和z轴三个方向上的位置变化量;
38.对于x轴方向的位置变化量,当检测单元检测到其量达到预设值时,控制器控制第一电磁驱动组件中的电磁致动单元三以调节运动平台,当检测单元检测到其未达到预设值时,控制器控制第二电磁驱动组件中的电磁致动单元六以调节运动平台;
39.对于y轴方向的位置变化量,当检测单元检测到其量达到预设值时,控制器控制第一电磁驱动组件中的电磁致动单元二以调节运动平台,当检测单元检测到其未达到预设值时,控制器控制第二电磁驱动组件中的电磁致动单元五以调节运动平台。
40.对于z轴方向的位置变化量,当检测单元检测到其量达到预设值时,控制器控制第一电磁驱动组件中的电磁致动单元一以调节运动平台,当检测单元检测到其未达到预设值时,控制器控制第二电磁驱动组件中的电磁致动单元四以调节运动平台。
41.进一步地,预设值的范围为0.1mm至2mm。
42.本发明的有益之处在于所提供的双级多自由度空间位置精密稳定系统,利用电磁直驱技术,减少了中间传动机械结构,实现了精度高、响应迅速的直线定位功能。
43.本发明的有益之处还在于所提供的双级多自由度空间位置精密稳定系统,实现了双级三自由度的空间位置调节,能够抵消空间范围内三自由度的振动/扰动,提高光学测试精度。
附图说明
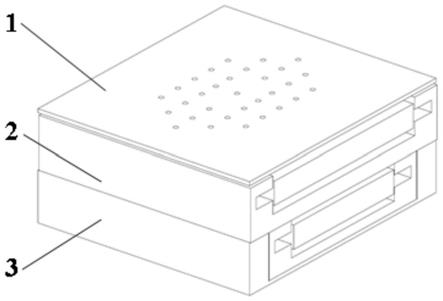
44.图1是本发明的一种双级多自由度空间位置精密稳定系统的示意图;
45.图2是本发明的二级平台的示意图;
46.图3是本发明的二级平台的另一视角的示意图;
47.图4是本发明的一级平台的示意图;
48.双级多自由度空间位置精密稳定系统,运动平台1,二级平台2,二级x轴运动单元21,y轴直线导轨滑块组件二22,二级底板23,引导凸起231,u型槽三232,x轴直线导轨滑块组件二24,二级y轴运动单元25,引导条三251,u型槽四252,一级平台3,一级z轴运动单元31,引导条一311,u型槽二312,一级底板32,u型槽一321,x轴直线导轨滑块组件一33,一级y轴运动单元34,引导条二341,引导槽342,一级x轴运动单元35,y轴直线导轨滑块组件一36。
具体实施方式
49.以下结合附图和具体实施例对本发明作具体的介绍。
50.如图1-4所示为本技术的一种双级多自由度空间位置精密稳定系统,主要包含:运动平台1、二级平台2、一级平台3和控制器。其中,二级平台2连接至运动平台1且位于运动平台1的下方,二级平台2设有第二电磁驱动组件以通过电磁致动的方式在多个方向上调节运动平台1的位置。一级平台3连接至二级平台2且位于二级平台2的下方,一级平台3设有第一电磁驱动组件以通过电磁致动的方式在多个方向上调节二级平台2。由于运动平台1是直接连接在二级平台2上,对二级平台2的调节就是调节运动平台1的位置。控制器连接至第一电磁驱动组件和第二电磁驱动组件,通过控制第一电磁驱动组件和第二电磁驱动组件来分别
驱动一级平台3和二级平台2。
51.在本技术中,二级平台2在第二电磁驱动组件的驱动下能够在x轴、y轴和z轴三个方向上调节运动平台1的位置。一级平台3在第一电磁驱动组件的驱动下同样能够在x轴、y轴和z轴三个方向上调节二级平台2从而调节运动平台1的位置。以下具体介绍上述组件。
52.具体而言,第一电磁驱动组件包含电磁致动单元一、电磁致动单元二和电磁致动单元三。一级平台3包含:一级底板32、一级z轴运动单元31、一级y轴运动单元34和一级x轴运动单元35。一级底板32安装位置周围应没有遮挡物,且尽量远离振动源,以保证良好的稳定精度。一级z轴运动单元31沿z轴方向可动连接至一级底板32,两者浮动连接。一级z轴运动单元31和一级底板32之间设有驱动一级z轴运动单元31沿z轴方向运动的电磁致动单元一。一级y轴运动单元34沿y轴方向可动连接至一级z轴运动单元31,一级y轴运动单元34和一级z轴运动单元31之间设有驱动一级y轴运动单元34沿y轴方向运动的电磁致动单元二。一级x轴运动单元35沿x轴方向可动连接至一级y轴运动单元34,一级y轴运动单元34上设有引导槽342,二级平台2的底部设有与引导槽342配合的引导凸起231,引导凸起231和引导槽342之间设有驱动二级平台2沿x轴方向运动的电磁致动单元三。
53.在本技术中,一级底板32设有u型槽一321,一级z轴运动单元31设有与u型槽一321配合的引导条一311,u型槽一321和引导条一311之间设有电磁致动单元一。电磁致动单元一包含线圈和永磁体,线圈安装在引导条一311上,永磁体安装在u型槽一321上。当线圈通电时,引导条一311被电磁力驱动并沿着u型槽一321运动。下述的电磁致动单元的结构和原理是一致的,不再赘述。一级z轴运动单元31设有u型槽二312,一级y轴运动单元34设有与u型槽二312配合的引导条二341,u型槽二312和引导条二341之间设有电磁致动单元二。
54.在本技术中,一级平台3还包含x轴直线导轨滑块组件一33和y轴直线导轨滑块组件一36。一级x轴运动单元35与一级y轴运动单元34通过x轴直线导轨滑块组件一33连接,x轴直线导轨滑块组件一33的滑块与一级x轴运动单元35通过螺栓固定连接在一起,x轴直线导轨滑块组件一33的直线导轨与一级y轴运动单元34通过螺栓固定连接在一起,进而一级x轴运动单元35与一级y轴运动单元34可实现相对滑动。同样的,一级y轴运动单元34与一级z轴运动单元31通过y轴直线导轨滑块组件一36连接,y轴直线导轨滑块组件一36的滑块与一级y轴运动单元34通过螺栓固定连接在一起,y轴直线导轨滑块组件一36的直线导轨与一级z轴运动单元31通过螺栓固定连接在一起,进而一级y轴运动单元34与一级z轴运动单元31可实现相对滑动。
55.第二电磁驱动组件包含电磁致动单元四、电磁致动单元五和电磁致动单元六。二级平台2包含:二级底板23、二级y轴运动单元25和二级x轴运动单元21。二级底板23的底部设有引导凸起231,引导凸起231和引导槽342之间还设有用于驱动二级底板23沿z轴方向运动的电磁致动单元四。即,电磁致动单元三和电磁致动单元四均设置在引导凸起231和引导槽342之间。这样,引导凸起231可在引导槽342内同时沿x轴方向运动,也可以沿z轴方向运动。引导凸起231浮动插入引导槽342内。当二级底板23沿z轴方向运动至与一级x轴运动单元35接触时,一级x轴运动单元35辅助支撑二级底板23。
56.二级y轴运动单元25沿y轴方向可动连接至二级底板23,二级y轴运动单元25和二级底板23之间设有驱动二级y轴运动单元25沿y轴方向运动的电磁致动单元五。二级x轴运动单元21沿x轴方向可动连接至二级y轴运动单元25,二级x轴运动单元21和二级y轴运动单
元25之间设有驱动二级x轴运动单元21沿x轴方向运动的电磁致动单元六,运动平台1连接至二级x轴运动单元21。具体的,二级底板23设有u型槽三232,二级y轴运动单元25设有与u型槽三232配合的引导条三251,u型槽三232和引导条三251之间设有电磁致动单元五。二级y轴运动单元25设有u型槽四252,二级x轴运动单元21与u型槽四252配合,u型槽四252和二级x轴运动单元21之间设有电磁致动单元六。
57.在本技术中,二级平台2还包括x轴直线导轨滑块组件二24和y轴直线导轨滑块组件二22。二级y轴运动单元25与二级x轴运动单元21通过x轴直线导轨滑块组件二24连接,x轴直线导轨滑块组件二24的滑块与二级x轴运动单元21通过螺栓固定连接在一起,x轴直线导轨滑块组件二24的直线导轨与二级y轴运动单元25通过螺栓固定连接在一起,进而二级y轴运动单元25与二级x轴运动单元21可实现相对滑动。二级y轴运动单元25与二级底板23通过y轴直线导轨滑块组件二22连接,y轴直线导轨滑块组件二22的滑块与二级y轴运动单元25通过螺栓固定连接在一起,y轴直线导轨滑块组件二22的直线导轨与二级底板23通过螺栓固定连接在一起,进而二级y轴运动单元25与二级底板23可实现相对滑动。
58.作为一种优选的实施方式,u型槽一321和引导条一311之间设有用于检测一级底板32和一级z轴运动单元31之间相对位置的光栅尺传感器一。u型槽二312和引导条二341之间设有用于检测一级z轴运动单元31和一级y轴运动单元34之间相对位置的光栅尺传感器二。引导凸起231和引导槽342内设有用于检测一级y轴运动单元34和二级底板23之间的x轴方向相对位置的光栅尺传感器三和用于检测一级y轴运动单元34和二级底板23之间的z轴方向相对位置的光栅尺传感器四。u型槽三232和引导条三251之间设有用于检测二级底板23和二级y轴运动单元25之间位置关系的光栅尺传感器五。u型槽四252和二级x轴运动单元21之间设有用于检测二级y轴运动单元25和二级x轴运动单元21之间位置关系的光栅尺传感器六。光栅尺传感器一、光栅尺传感器二、光栅尺传感器三、光栅尺传感器四光栅尺传感器五和光栅尺传感器六连接至控制器。通过光栅尺传感器检测相互运动的两个部件的位置关系,控制器根据该位置关系来分别调节电磁致动单元。
59.作为一种优选的实施方式,双级多自由度空间位置精密稳定系统还包含:检测单元。
60.检测单元用于检测运动平台1的位置变化量。当检测单元检测到的运动平台1的位置变化量达到预设值时,控制器控制第一电磁驱动组件以调节运动平台1。当检测单元检测到的运动平台1的位置变化量未达到预设值时,控制器控制第二电磁驱动组件以调节运动平台1。
61.可以理解的是,在位置变化量比较大时,控制器控制第一电磁驱动组件,从而通过一级平台3进行电磁致动,实现运动平台1在空间位置三自由度方向上的粗调。当位置变化量较小时,控制器控制第二电磁驱动组件,从而通过二级平台2进行电磁致动,实现运动平台1在空间位置三自由度方向上的精调。
62.作为一种更加优选的实施方式,双级多自由度空间位置精密稳定系统还包含:检测单元。
63.检测单元用于检测运动平台1在x轴、y轴和z轴三个方向上的位置变化量。对于x轴方向的位置变化量,当检测单元检测到其量达到预设值时,控制器控制第一电磁驱动组件中的电磁致动单元三以调节运动平台1,当检测单元检测到其未达到预设值时,控制器控制
第二电磁驱动组件中的电磁致动单元六以调节运动平台1。对于y轴方向的位置变化量,当检测单元检测到其量达到预设值时,控制器控制第一电磁驱动组件中的电磁致动单元二以调节运动平台1,当检测单元检测到其未达到预设值时,控制器控制第二电磁驱动组件中的电磁致动单元五以调节运动平台1。对于z轴方向的位置变化量,当检测单元检测到其量达到预设值时,控制器控制第一电磁驱动组件中的电磁致动单元一以调节运动平台1,当检测单元检测到其未达到预设值时,控制器控制第二电磁驱动组件中的电磁致动单元四以调节运动平台1。
64.与前述的检测单元的控制逻辑不同的是,在本实施例中,粗调和精调在各轴向方向均可同时进行,进而实现两个位移量级空间位置的无级切换调整。比如在x轴方向的精调由一级平台3完成,同时,在y轴和z轴方向的粗调由二级平台2完成。
65.作为一种优选的实施方式,预设值的范围为0.1mm至2mm。在本技术中,预设值设为1mm。
66.以上显示和描述了本发明的基本原理、主要特征和优点。本行业的技术人员应该了解,上述实施例不以任何形式限制本发明,凡采用等同替换或等效变换的方式所获得的技术方案,均落在本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。