1.本技术涉及脑立体定位仪技术领域,尤其是涉及一种双臂数显脑立体定位仪。
背景技术:
2.脑立体定位手术是一种用于微创操作大脑的方法,通过脑图谱和三维坐标系实现大脑内部小目标的定位,并对目标位点执行一些操作,例如消融、活检、病变、注射、刺激、植入等。为了使得定位手术也越来越精准,精确找到大脑内部的目标位点,脑立体定位仪应运而生。脑立体定位仪是神经解剖、神经生理、神经药理和神经外科等领域内的重要研究设备,利用颅骨表面的标志或其它参考点形成一个三维空间坐标体系,来确定动物大脑皮层下某些神经结构的位置,以便在非直视暴露下对神经结构进行定向的注射、刺激、破坏、引导定位等操作,可用于帕金森氏病动物模型建立、癫痫动物模型建立、脑内肿瘤模型建立、学习记忆、脑内神经干细胞移植、脑缺血等研究。
3.针对上述中的相关技术,发明人认为相关技术在进行脑立体定位时,目标位点的定位精度有限,使用效果不佳。
技术实现要素:
4.为了便于在脑立体定位中提高目标位点的定位精度,本技术提供一种双臂数显脑立体定位仪。
5.本技术提供的一种双臂数显脑立体定位仪采用如下的技术方案:
6.一种双臂数显脑立体定位仪,包括u型底座,还包括分别装配在u型底座左右两侧的第一操作臂和第二操作臂、与所述第一操作臂滑动连接的第一磁栅数显系统以及与所述第二操作臂滑动连接的第二磁栅数显系统,所述u型底座上设置有适配器夹持器和与所述适配器夹持器可拆卸连接的适配器,所述适配器两侧分别设置有第一耳杆夹持装置和第二耳杆夹持装置,所述第一操作臂包括第一ap轴、第一ml轴、第一dz轴,所述第一dz轴通过万向轴与第一ml轴可调节连接,第一ap轴通过成轴承螺母与第一ml轴垂直设置,第一ap轴内端设置有v型夹持器,所述第一ap轴、所述第一ml轴和所述第一dz轴的轴臂上均固定设置有磁栅尺,所述第一ap轴、所述第一ml轴、所述第一dz轴分别通过对应的磁栅尺与所述第一磁栅数显系统滑动连接;所述第二操作臂包括第二ap轴、第二ml轴、第二dz轴,所述第二dz轴通过万向轴与第二ml轴可调节连接,第二ap轴通过成轴承螺母与第二ml轴垂直设置,第二ap轴内端设置有v型夹持器,所述第二ap轴、所述第二ml轴、所述第二dz轴的轴臂上均固定设置有磁栅尺,所述第二ap轴、所述第二ml轴、所述第二dz轴分别通过对应的磁栅尺与所述第二磁栅数显系统滑动连接。
7.通过采用上述技术方案,可以根据第一操作臂和第二操作臂对应的ap轴、ml轴、dz轴可以确定一个三维空间坐标体系,在进行脑立体定位时,将待测动物放置在对应的适配器上,将适配器与u型底座上的适配器夹持器可拆卸连接,将第一耳杆夹持装置和第二耳杆夹持装置分别固定在待测动物的左右耳部便于增加固定作用,便于完成对待测动物脑部的
固定。将待测动物脑部固定在数显脑立体定位仪后,第一磁栅数显系统对第一操作臂上的移动距离进行测量并显示,第二磁栅数显系统对第二操作臂上的移动距离进行测量并显示,便于确定待测动物脑部在三维空间坐标体系中的三维坐标,从而便于确定待测动物脑部内的目标位点。
8.可选的,所述第一磁栅数显系统包括至少3个磁栅读头和与磁栅读头数量相同的信号处理通道,所述磁栅读头分别与第一操作臂上的所述磁栅尺一一对应滑动连接,所述第一磁栅数显系统还包括显示屏,所述磁栅读头通过对应的所述信号处理通道与所述显示屏连接。
9.通过采用上述技术方案,第一操作臂上的所述第一ap轴、所述第一ml轴和所述第一dz轴的轴臂上分别固定有一个磁栅尺,为磁栅读头提供安装便利,便于在所述第一ap轴、所述第一ml轴和所述第一dz轴上安装用于测量位移距离的磁栅读头。多个所述磁栅读头分别与所述第一ap轴、所述第一ml轴和所述第一dz轴的所述磁栅尺一一对应滑动连接,磁栅读头可以分别在所述第一ap轴、所述第一ml轴和所述第一dz轴上移动,便于测量磁栅读头的位移距离,从而便于根据磁栅读头在个轴上的位移距离进行目标位点的精准定位。
10.可选的,所述第二磁栅数显系统包括至少3个磁栅读头和与磁栅读头数量相同的信号处理通道,多个所述磁栅读头分别与第二操作臂上的所述磁栅尺一一对应滑动连接,所述第二磁栅数显系统还包括显示屏,所述磁栅读头通过对应的所述信号处理通道与所述显示屏连接。
11.通过采用上述技术方案,第二操作臂上的所述第二ap轴、所述第二ml轴和所述第二dz轴的轴臂上分别固定有一个磁栅尺,为磁栅读头提供安装便利,便于在所述第二ap轴、所述第二ml轴和所述第二dz轴上安装用于测量位移距离的磁栅读头。多个所述磁栅读头分别与所述第二ap轴、所述第二ml轴和所述第二dz轴的所述磁栅尺一一对应滑动连接,磁栅读头可以分别在所述第二ap轴、所述第二ml轴和所述第二dz轴上移动,便于测量磁栅读头的位移距离,从而便于根据磁栅读头在个轴上的位移距离进行目标位点的精准定位。
12.可选的,所述磁栅读头选用增量式磁栅编码器。
13.通过采用上述技术方案,增量式磁栅编码器的工作电压为v,最小分辨率为.μm,输出khz push-pull数字信号波形;磁栅读头在磁栅尺上进行位移运动来测量距离,将磁化信号转化成数字信号输出,选用增量式磁栅编码器便于提高测量精度和提高分辨率,此外,还具有坚固耐用的优点。
14.可选的,所述信号处理通道包括电平转换芯片和mcu处理器,所述电平转换芯片的输入端与所述磁栅读头电连接,用于将磁化信号转换成数字信号并输出波形,所述mcu处理器与所述电平转换芯片的输出端电连接,所述mcu处理器与所述显示屏通过串口连接,用于根据所述电平转换芯片输出的波形确定出位移方向、计算出位移距离的相对数值,并在所述显示屏上显示出来。
15.通过采用上述技术方案,信号处理通道是磁栅读头与显示屏之间的连接通道,也是磁栅读头输出的磁化信号的处理通道,信号处理通道中,磁化信号依次通过电平转换芯片和mcu处理器,电平转换芯片将磁化信号转换成数字信号并输出波形,mcu处理器根据电平转换芯片输出的波形确定出位移方向、计算出位移距离的相对数值,并实时通过串口传输给所述显示屏显示出来,便于实时查看。此外,信号处理通道与所述磁栅尺的数量一致,
每个信号处理通道之间独立工作、互不影响,便于提高测量精度。
16.可选的,还包括加热装置和动物温度测量装置,所述加热装置放置于u型底座上,所述加热装置通过接口与所述第二磁栅数显系统或所述第一磁栅数显系统电连接,所述动物温度测量装置通过接口与连接有所述加热装置的所述第二磁栅数显系统或所述第一磁栅数显系统电连接。
17.通过采用上述技术方案,在脑立体定位手术中,进行麻醉后的待测动物容易出现失温现象,为了改善这一问题,在本技术的脑立体定位仪上设置加热装置,将加热装置放置于所述u型底座上,在进行脑立体定位手术时,将待测动物放置于所述加热装置上,加热装置加热使待测动物的温度保持在正常的温度范围内,便于对正在进行脑立体定位手术中的待测动物进行恒温处理,帮助待测动物保持体温,维持正常的生命体征,降低待测动物温度下降对手术的影响,有助于脑立体定位手术的正常进行。所述加热装置通过接口与所述第二磁栅数显系统或所述第一磁栅数显系统电连接,可以从与所述加热装置相连的磁栅数显系统输入加热温度,所述加热装置的温度到达加热温度后,停止加热。所述动物温度测量装置与待测动物直接接触,用于实时测量待测动物的体温,所述动物温度测量装置通过接口与连接有加热装置的所述第二磁栅数显系统或所述第一磁栅数显系统电连接,将动物温度测量装置所测得的温度显示在磁栅数显系统的显示屏上,加热装置也可以根据动物温度测量装置检测的动物体温进行升温。
18.综上所述,本技术包括以下至少一种有益技术效果:
19.本技术的一种双臂数显脑立体定位仪采用双操作臂,根据第一操作臂和第二操作臂对应的ap轴、ml轴、dz轴可以确定一个三维空间坐标体系,在进行脑立体定位时,将待测动物脑部固定在本技术的脑立体定位仪上时,磁栅读头会在双操作臂上的磁栅尺上产生移动,第一磁栅数显系统对磁栅读头在第一操作臂上的移动距离进行测量并显示,第二磁栅数显系统对第二操作臂上的移动距离进行测量并显示,便于确定待测动物脑部在三维空间坐标体系中的三维坐标,从而便于确定待测动物脑部内的目标位点。
20.加热装置和动物温度测量装置不仅便于直观地查看实际温度,还便于根据实际温度状态进行人为调节,将u型底座的温度保持在一个特定的温度范围内,便于对正在进行脑立体定位手术中的待测动物进行恒温处理,帮助待测动物保持体温,维持正常的生命体征,降低待测动物温度下降对手术的影响,有助于脑立体定位手术的正常进行。
附图说明
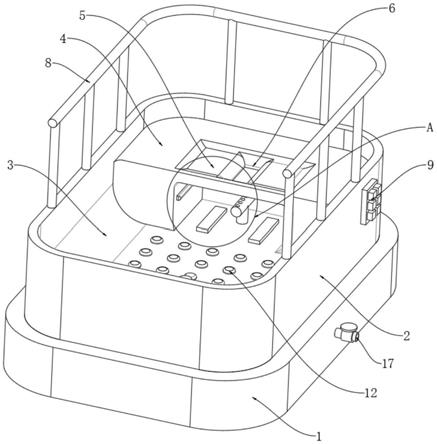
21.图1是本技术实施例的一种双臂数显脑立体定位仪三维图。
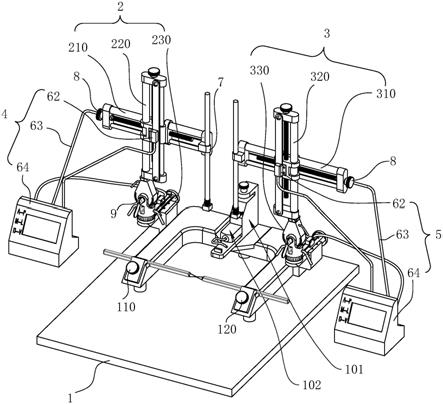
22.图2是本技术实施例的第二操作臂的结构示意图。
23.图3是图2中a部分的局部放大图。
24.图4是本技术实施例的一种带有加热装置和动物温度测量装置的双臂数显脑立体定位仪三维图。
25.图5是本技术实施例的一种带有温控模块、温度显示器和温控按钮的双臂数显脑立体定位仪三维图。
26.图6是本技术实施例的温控模块的结构示意图。
27.附图标记说明:1、u型底座;2、第一操作臂;3、第二操作臂;4、第一磁栅数显系统;
5、第二磁栅数显系统;7、v型夹持器;8、轴承螺母;9、万向轴;101、适配器夹持器;102、适配器;103、温控模块;104、温度显示器;105、温控按钮;106、加热装置;107、动物温度测量装置;108、接口;110、第一耳杆夹持装置;120、第二耳杆夹持装置;130、电源;140、电加热装置;150、温度传感器;210、第一ap轴;220、第一ml轴;230、第一dz轴;310、第二ap轴;320、第二ml轴;330、第二dz轴;61、磁栅尺;62、磁栅读头;63、信号处理通道;64、显示屏。
具体实施方式
28.以下结合附图1-6对本技术作进一步详细说明。
29.本技术实施例公开一种双臂数显脑立体定位仪。参照图1和图2,一种双臂数显脑立体定位仪包括u型底座1、第一操作臂2、第二操作臂3、第一磁栅数显系统4、第二磁栅数显系统5、第一耳杆夹持装置110、第二耳杆夹持装置120。所述第一操作臂2和所述第二操作臂3分别装配在u型底座1的左右两侧;所述第一磁栅数显系统4与所述第一操作臂2滑动连接,所述第二磁栅数显系统5与所述第二操作臂3物理连接滑动连接;所述u型底座1上设置有适配器夹持器101和与所述适配器夹持器101可拆卸连接的适配器102,所述第一耳杆夹持装置110和所述第二耳杆夹持装置120分别设置于适配器102两侧。
30.所述第一操作臂2包括第一ap轴210、第一ml轴220、第一dz轴230,所述第一dz轴230通过万向轴9与第一ml轴220可调节连接,第一ap轴210通过成轴承螺母8与第一ml轴220垂直设置,第一ap轴210内端设置有v型夹持器7,所述第一ap轴210、所述第一ml轴220和所述第一dz轴230的轴臂上均固定设置有磁栅尺61,所述第一ap轴210、所述第一ml轴220、所述第一dz轴230通过对应的磁栅尺61分别与所述第一磁栅数显系统4滑动连接。所述第二操作臂3包括第二ap轴310、第二ml轴320、第二dz轴330,所述第二dz轴330通过万向轴9与第二ml轴320可调节连接,第二ap轴310通过成轴承螺母8与第二ml轴320垂直设置,第二ap轴310内端设置有v型夹持器7,所述第二ap轴310、所述第二ml轴320、所述第二dz轴330的轴臂上均固定设置有磁栅尺61,第二ap轴310、第二ml轴320、第二dz轴330通过对应的磁栅尺61分别与所述第二磁栅数显系统5滑动连接。
31.所述第一dz轴230设置于所述第一耳杆夹持装置110的外侧上方;所述第二dz轴330设置于所述第二耳杆夹持装置120的外侧上方。
32.本技术的一种双臂数显脑立体定位仪采用双操作臂,第一操作臂2和第二操作臂3上的ap轴、ml轴、dz轴采用轴承螺母8和万向轴9的连接方式有助于保持良好的坐标轴使用稳定性。
33.所述第一磁栅数显系统4包括磁栅读头62、信号处理通道63和显示屏64。
34.所述第一磁栅数显系统4至少包括3个所述磁栅读头62,分别安装在所述第一ap轴210、所述第一ml轴220和所述第一dz轴230上的对应磁栅尺61上,与第一操作臂2上的所述磁栅尺61一一对应滑动连接。
35.第一磁栅数显系统4中,所述信号处理通道63的数量与所述磁栅读头62的数量相同,且一一对应连接,每个磁栅读头62通过对应的信号处理通道63与显示屏64连接。若第一磁栅数显系统4包括3个所述磁栅读头62,则包括3个信号处理通道63,所述磁栅读头62与所述信号处理通道63一一对应连接,通过3个独立的信号处理通道63来分别计算对应磁栅读头62在磁栅尺61上的移动位移距离,相互之间互不影响,每一路都能独立工作,互不影响,
便于提高测量精度。多个所述磁栅读头62分别与所述第一ap轴210、所述第一ml轴220和所述第一dz轴230的所述磁栅尺61一一对应滑动连接,磁栅读头62可以分别在所述第一ap轴210、所述第一ml轴220和所述第一dz轴230上移动,便于测量磁栅读头62的位移距离,从而便于根据磁栅读头62在3个轴上的位移距离进行目标位点的精准定位。
36.作为第二磁栅数显系统5的一种实施方式,第二磁栅数显系统5包括磁栅读头62、信号处理通道63和显示屏64。
37.所述第二磁栅数显系统5至少包括3个磁栅读头62,分别安装在所述第二ap轴310、所述第二ml轴320和所述第二dz轴330上的对应磁栅尺61上,与第二操作臂3上的所述磁栅尺61一一对应滑动连接,参照图3。
38.第二磁栅数显系统5中,所述信号处理通道63的数量与所述磁栅读头62的数量相同,且一一对应连接,每个磁栅读头62通过对应的信号处理通道63与显示屏64连接。若第二磁栅数显系统5包括3个所述磁栅读头62,则信号处理通道63的数量有3个,所述磁栅读头62与所述信号处理通道63一一对应连接,通过3个独立的信号处理通道63来分别计算对应磁栅读头62在磁栅尺61上的移动位移距离,相互之间互不影响,每一路都能独立工作,互不影响,便于提高位移距离的测量精度。多个所述磁栅读头62分别与所述第二ap轴310、所述第二ml轴320和所述第二dz轴330的所述磁栅尺61一一对应滑动连接,磁栅读头62可以分别在所述第二ap轴310、所述第二ml轴320和所述第二dz轴330上移动,便于测量磁栅读头62的位移距离,从而便于根据磁栅读头62在3个轴上的位移距离进行目标位点的精准定位。
39.作为磁栅读头62的一种选择,磁栅读头62可以选用增量式磁栅编码器,工作电压为5v,最小分辨率为2.5μm;所述磁栅读头62在所述磁栅尺61上进行位移运动时产生磁化信号,便于后续过程中将对该磁化信号转化成数字信号输出;便于提高测量精度和分辨率。
40.所述信号处理通道63为磁栅读头62和显示屏64的连接通道,也是将磁化信号转变为位移距离数值的处理通道。所述信号处理通道63包括电平转换芯片和mcu处理器,所述电平转换芯片的输入端与磁栅读头62电连接,用于将磁化信号转换成数字信号并输出波形,所述mcu处理器与所述电平转换芯片的输出端电连接,所述mcu处理器和所述显示屏64通过串口连接, mcu处理器用于处理电平转换芯片输出的波形,并根据所述电平转换芯片输出的波形确定出位移方向、计算出位移距离的相对数值,mcu计算出来的位移距离会实时通过串口传输给显示屏64在所述显示屏64上显示出来,便于实时查看。
41.作为mcu处理器的一种选择,可选用stm32f103c8t6,32bit arm微处理器。
42.在一种实施方式中,电平转换芯片将磁化信号转换成数字信号并输出波形 。所述mcu处理器根据所述电平转换芯片输出波形的相位来判断磁栅读头62在磁栅尺61上的运动方向,和/或根据波形的相位差来计算出相对的位移距离,并在所述显示屏64上显示出来。
43.作为显示屏64的一种选择,所述显示屏64可以选用触摸屏幕,所述显示屏64用来显示各个磁栅读头62在磁栅尺61上的移动距离。所述显示屏64还可以进行人机交互实现操控,在显示屏64上可以进行的操控包括分辨率选择和清零操作。在分辨率选择时,若切换到0.1的分辨率,则mcu处理器会对位移数据进行4舍5入运算后再显示出来。当脑立体定位仪上未放置待测动物时,可以进行清零操作,以清零操作时磁栅读头62在所述磁栅尺61的位置作为起始点,当脑立体定位仪上放置待测动物后,所述磁栅读头62在所述磁栅尺61上会移动一段距离,磁栅读头62在磁栅尺61上的位置相对于起始点位置有位移距离的变化。清
零操作也可以在脑立体定位操作过程中进行,如完成第一次距离测量后,为了提高测量的精确度,可以再次进行清零操作,如果磁栅读头62在某个位置时进行清零操作,则会把该位置作为新的起始点来计算位移距离。因此磁栅数显系统测量显示的是磁栅读头62相对于起始点的位移距离。
44.作为显示屏64的一种选择,可选用迪文dmt80480t050_o7wt型号的触摸屏幕,5.0英寸,800x480分辨率。
45.在脑立体定位手术中,进行麻醉后的待测动物容易出现失温现象,为了改善这一问题,需要在脑立体定位手术中维持待测动物体温。作为一种维持待测动物体温的实施方式,参照图4,本技术的一种双臂数显脑立体定位仪还包括加热装置106和动物温度测量装置107,所述加热装置106放置于u型底座1上,所述加热装置106通过接口108与所述第二磁栅数显系统5或所述第一磁栅数显系统4电连接,所述动物温度测量装置107通过接口108与所述第二磁栅数显系统5或所述第一磁栅数显系统4电连接。接口108设置于第二磁栅数显系统5或第一磁栅数显系统4上,接口108的数量至少包括两个,其中包括作为连接加热装置106的接口,和作为连接动物温度测量装置107的接口。
46.在本技术的脑立体定位仪上设置有加热装置106,加热装置106放置于u型底座1上,在进行脑立体定位手术时,将待测动物放置于加热装置106上,加热装置106均匀加热使待测动物的温度保持在正常的温度范围内,便于对正在进行脑立体定位手术中的待测动物进行恒温处理,帮助待测动物保持体温,维持正常的生命体征,降低待测动物温度下降对手术的影响,有助于脑立体定位手术的正常进行。所述加热装置106通过接口108与所述第一磁栅数显系统4或所述第二磁栅数显系统5电连接,操作人员可以从与加热装置106相连的磁栅数显系统输入温度值,所述加热装置106加热的温度到达该输入温度值后,停止加热。所述动物温度测量装置107设置在待测动物上,与待测动物直接或间接接触,用于实时测量待测动物的体温,所述动物温度测量装置107通过接口108与连接有加热装置106的第一磁栅数显系统4或第二磁栅数显系统5电连接,动物温度测量装置107所测得的温度可以在磁栅数显系统的显示屏64上进行显示,加热装置106也可以根据动物温度测量装置107检测的动物体温进行升温,若动物温度测量装置107检测的动物体温低于操作人员输入的温度值,则加热装置106进行加热,直至温度达到操作人员输入的温度值时停止加热。
47.作为加热装置106的一种选择,可选用加热毯。加热毯柔软,可以平铺放置于u型底座1上,也可以包裹待测动物躯体放置于u型底座1上,且加热毯加热比较均匀,便于放置待测动物以及给待测动物较好的维持体温。
48.作为动物温度测量装置107的一种选择,可选用肛温探头,将所述肛温探头插入待测动物的肛门,肛测法测量体温能够更精确地得到待测动物的体温。
49.参照图5和图6,作为一种维持待测动物体温的另一种实施方式,u型底座1内嵌有温控模块103,温控模块103的设置方式:u型底座1下方设置开槽,将温控模块103固定在开槽内,槽口放置保温层后用盖板固定。温控模块103包括电源130、电加热装置140和温度传感器150,所述电源130通过电源130线为所述电加热装置140供电,所述温度传感器150通过信号线与所述电加热装置140连接,用于采集所述电加热装置140的温度信息。
50.基于上述结构,u型底座1内嵌的温控模块103可以将u型底座1的温度保持在设定的温度范围内,便于对正在进行脑立体定位手术中的待测动物进行恒温处理,帮助待测动
物保持体温,维持正常的生命体征,降低待测动物温度下降对手术的影响,有助于脑立体定位手术的正常进行。
51.作为一种维持待测动物体温的进一步实施方式,参照图5和图6,u型底座1上设置有温度显示器104和温控按钮105,温度显示器104与温度传感器150电连接,用于将温度传感器150的电信号转换成温度数值并显示温度数值;温控按钮105与电加热装置140通过开关模组连接,用于控制所述电加热装置140升温或降温。
52.u型底座1上的温度显示器104可以实时显示当前的温度数值,便于直观地查看实际温度是否在预设的温度阈值范围内,若实际温度低于或高于预设的温度阈值,则可以通过所述温控按钮105手动调节温度,操作方便,人工操作能够提高温度的可控性和安全性。
53.作为适配器102的一种选择,适配器102可以选用装配小鼠、大鼠、兔猫等不同动物脑部的适配器。
54.耳杆夹持装置可以夹持与小鼠、大鼠、兔猫等不同动物脑部相适配的耳杆。
55.所述v型夹持器7可以夹持电极、注射针、套管、光纤等操作器件。
56.本技术实施例一种双臂数显脑立体定位仪的实施原理为:本技术的一种双臂数显脑立体定位仪采用双操作臂建立三维空间坐标体系,在进行脑立体定位时,将待测动物放置在对应的适配器102上,将适配器102与u型底座1上的适配器夹持器101可拆卸连接,将第一耳杆夹持装置110和第二耳杆夹持装置120分别固定在待测动物的左右耳部便于增加固定作用,便于完成对待测动物脑部的固定。将待测动物脑部固定在数显脑立体定位仪后,第一操作臂2和第二操作臂3上对应的ap轴、ml轴、dz轴上的磁栅读头62会在对应磁栅尺61上移动一定的距离,第一磁栅数显系统4对第一操作臂2中三个轴上的磁栅读头62在对应磁栅尺61上的移动距离进行测量并显示,第二磁栅数显系统5对第二操作臂3中三个轴上的磁栅读头62在对应磁栅尺61上的移动距离进行测量并显示,此时测量得到六个移动距离,便于较精确的确定待测动物脑部在三维空间坐标体系中的三维坐标,从而便于确定待测动物脑部内的目标位点。此外,u型底座1的温控模块103、温度显示器104和温控按钮105,可以实时查看温度和人工操作调节温度,便于对正在进行脑立体定位手术中的待测动物进行恒温处理,帮助待测动物保持体温,维持正常的生命体征,降低待测动物温度下降对手术的影响,有助于脑立体定位手术的正常进行。磁栅读头62在磁栅尺61上进行位移运动时会输出100khz的5v电平信号,经由电平转换芯片转成3.3v电信号传输到mcu处理器进行处理,mcu的内部编码处理核心通过ab两相的波形来判断磁栅读头62在磁栅尺61上的运动方向,并且ab两相波形的相位差来计算出相对的位移距离,存储在mcu的内部缓存中。在进行脑立体定位前,先在显示器进行清零操作,显示器上显示的位移数值为0,以此时磁栅读头62的位置为起始点,再进行后续的脑立体定位相关操作,将放置有待测动物的适配器102装配在u型底座1的适配器夹持器101上,将第一耳杆夹持装置110和第二耳杆夹持装置120分别固定在待测动物的左右耳部,此时磁栅读头62在磁栅尺61上产生一定距离的移动,磁栅读头62在磁栅尺61上移动时,则位移数值会一直增加,直到磁栅读头62在磁栅尺61上停止移动,显示器上显示的数值是磁栅读头62从起始点移动到终点的位移距离,磁栅读头62向反方向移动时,显示器上显示的位移数值开始减小,当磁栅读头62回到起始点时,显示器上显示的位移数值为0,从起始点继续向反方向移动时显示器上的位移数值出现负数。
57.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术
的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。