具有使用tchebicheff四杆连杆机构的悬架的机动车辆
技术领域
1.本发明涉及对两轮、三轮或四轮鞍座骑乘车辆的改进。更具体地说,本发明涉及对倾斜式鞍座机动车辆的前悬架的改进,该倾斜式鞍座机动车辆有一个或两个后驱动轮以及一个或两个前转向轮,例如两轮或三轮摩托车、两轮或三轮小型摩托车、quad等。
背景技术:
2.两轮、三轮或四轮鞍座骑乘车辆通常有:一个或两个后驱动轮,该后驱动轮通过它们自身的后悬架而与机动车辆的框架连接;以及一个或两个前转向轮,该前转向轮与车把连接,并设置有相应的前悬架。悬架使得机动车辆的所谓的簧载质量与所谓的非簧载质量连接,并允许在簧载质量和非簧载质量之间的相对运动。悬架通常是减震悬架,并包括相应的减震器,该减震器再包括弹性部件(通常为弹簧)以及制动器或阻尼器。悬架还包括机械部件,该机械部件使得簧载质量与非簧载质量连接,且它们之间能够相对运动,以使得由地面的粗糙或不规则而传递至轮的震动不会传递至车辆底盘,或者以阻尼方式传递至车辆底盘。
3.在鞍座骑乘车辆例如摩托车、小型摩托车、quad等中,前转向轮的悬架允许在车把和转向柱以及在前转向轮之间相对运动。鞍座骑乘车辆的前转向轮的一些悬架使用伸缩叉,该伸缩叉有一个在另一个内部滑动的部件,以便允许上述相对运动。伸缩叉使用圆柱形对,该圆柱形对有相互滑动关系的部件;因此,这些叉有这种类型相对运动的一些典型缺点。另一方面,其它类型的悬架使用旋转对,该旋转对有成相互旋转关系的部件。在这种情况下,四杆连杆机构(通常为四杆连杆机构)插置于簧载质量和非簧载质量之间,它进行变形,以便允许在簧载质量(车辆底盘和与它连接的部件)和非簧载质量(轮、制动器)之间的悬架运动。旋转对由铰链表示,该铰链使得四杆连杆机构的部件彼此连接。
4.使用具有用于在簧载质量和非簧载质量之间连接的旋转对的运动机构的悬架相对于棱柱形和圆柱形对具有旋转对的优点,但是不允许前转向轮轴线的直线运动。实际上,在悬架运动中,当悬架由于例如不平坦地面或者在制动时由于在框架上产生的动态力(该动态力通过悬架被释放至轮上)而收缩和延伸时,轮轴执行非直线运动,从而导致轮在地面上横向滑动,这可能触发例如跳跃的问题。
5.因此,有利的是提供一种用于鞍座骑乘机动车辆的前转向轮的悬架,该机动车辆有两个或更多轮,该悬架能够使得伸缩叉悬架的优点与使用旋转对运动机构的悬架的优点结合。
技术实现要素:
6.根据一个方面,这里公开了一种具有至少一个后驱动轮和至少一个第一前转向轮的鞍座骑乘机动车辆,该第一前转向轮与可旋转臂连接,该可旋转臂提供有绕转向轴线的旋转运动。轮支承件在插入悬架的情况下与可旋转臂连接,该悬架使得轮支承件和安装于其上的轮与可旋转臂连接。悬架包括减震器。轮支承件支承前转向轮,并确定所述轮的旋转
轴线。例如,轮安装轴可以固定在轮支承件上,或者轮支承件可以有支承轮轴的轴承。其特征为,悬架包括tchebycheff四杆连杆机构(也称为chebychevn四杆连杆机构,或者tchebycheff或chebychev机构)。
7.在实际实施例中,tchebycheff四杆连杆机构包括第一曲柄,该第一曲柄通过第一铰链而铰接在可旋转臂上,并通过第二铰链而铰接在tchebicheff四杆连杆机构的连接杆上。第二曲柄通过第一铰链而铰接在可旋转臂上,并通过第二铰链而铰接在连接杆上。轮支承件限制在连接杆的限制点中,以使得前转向轮的旋转轴线与第一曲柄的第二铰链和第二曲柄的第二铰链近似等距。
8.在实际实施例中,第一曲柄和第二曲柄在悬架的任何位置都交叉,即它们在机动车辆正常使用时对于悬架能够采取的所有位置都保持彼此交叉。
9.在一些实施例中,轮支承件限制在连接杆上,以使得前转向轮的旋转轴线平行于第一曲柄和第二曲柄的第一铰链和第二铰链的轴线。在这种情况下,tchebicheff四杆连杆机构的铰链的轴线实际上相对于机动车辆定向为左右方位。
10.在这里所述的实施例中,轮支承件与连接杆刚性连接,并形成用于前转向轮的支承轴承的座。该座可以是轴承插入其中的座,该轴承再接收与轮成一体的轴。相反,座可以由与轮支承件刚性地成一体的轴来形成,轴承键接在该轴上,该轴承再支承轮。
11.在其它实施例中,tchebicheff四杆连杆机构的铰链的轴线可以彼此平行,并与包含前转向轮的旋转轴线的平面正交。在这种情况下,tchebicheff四杆连杆机构的铰链的轴线基本平行于沿机动车辆的前后方向延伸的平面。
12.在一些设置中,轮支承件根据与tchebicheff四杆连杆机构的铰链的轴线基本平行的轴线而铰接在tchebicheff四杆连杆机构的连接杆上。
13.轮支承件可以将前转向轮支承在这样的位置,使得前转向轮的旋转轴线与轮支承件铰接在tchebicheff四杆连杆单元的连接杆上所环绕的轴线正交。
14.在一些实施例中,第一曲柄和第二曲柄的第一铰链布置在可旋转臂的一侧,且第一曲柄和第二曲柄的第二铰链布置在可旋转臂的第二侧,该第二侧与第一侧相对。连接杆位于所述第二侧。优选是,前转向轮位于可旋转臂的第二侧,且连接杆优选是位于前转向轮和可旋转臂之间。
15.悬架的减震器通常连接在悬架的两个点之间,这两个点在悬架运动时相对彼此运动,从而使得减震器伸长和缩短。在实际实施例中,减震器在一侧与可旋转臂连接,并在另一侧与刚性连接在轮支承件上的点连接,或者与tchebicheff四杆连杆机构的一个其余元件(即第一曲柄、第二曲柄或连接杆)连接。
16.根据另一方面,一种鞍座骑乘机动车辆设置有至少一个后驱动轮和至少一个第一前转向轮,该第一前转向轮通过悬架而与可旋转臂连接,该可旋转臂提供有绕转向轴线的旋转运动,其中:
17.轮支承件在插入悬架的情况下而与可旋转臂连接,该轮支承件支承前转向轮和确定所述轮的旋转轴线;
18.悬架包括:四杆连杆机构,该四杆连杆机构有:第一曲柄,该第一曲柄有铰接在可旋转臂上的第一端和铰接在连接杆上的第二端;第二曲柄,该第二曲柄有铰接在可旋转臂上的第一端和铰接在连接杆上的第二端;
19.轮支承件限制在连接杆限制点上;以及
20.四杆连杆机构设置成这样,在四杆连杆机构由于悬架的悬架运动的效果而变形的过程中,该限制点执行近似直线的轨迹。
附图说明
21.通过下面的说明和附图,将更好地理解本发明,该附图表示了本发明的示例和非限定实施例。更特别是,在附图中:
22.图1表示了根据实施例的具有前悬架的两轮机动车辆的轴测图,其中多个部件移除;
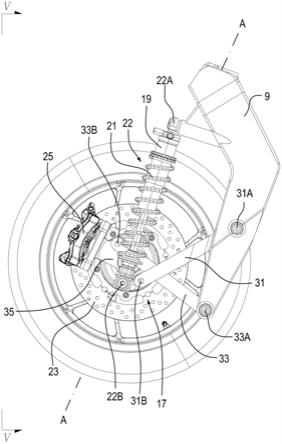
23.图2表示了图1的机动车辆的正视图;
24.图3表示了根据图2的iii-iii的侧视图;
25.图4a和4b分别表示了图1至3的悬架处于延伸位置和收缩位置的放大侧视图;
26.图5表示了根据图4a的线v-v的正视图;
27.图6a和6b表示了图4a、4b和5的悬架的轴测图;
28.图7表示了图4a、4b、5、6a和6b的悬架的分解图;
29.图7a分别表示了图4至7的悬架处于减震器的两个不同位置(最大压缩和最大延伸)的示意图;
30.图8表示了在还一实施例中的悬架根据图9的线viii-viii的侧视图;
31.图9表示了根据图8的ix-ix的正视图;
32.图10和图11表示了图8和9的悬架的轴测图;
33.图12表示了图9、10和11的悬架的分解图;
34.图13表示了前悬架的还一实施例沿图14的线xiii-xiii的侧视图;
35.图14表示了根据图13的xiv-xiv的正视图;
36.图15和图16表示了图13和14的悬架的轴测图;
37.图17表示了图13、14、15和16的悬架的分解图;
38.图18表示了具有用于两个前转向轮的双tchebicheff四杆连杆机构悬架的三轮机动车辆的轴测图;
39.图19表示了图18的机动车辆根据图20的线xix-xix的正视图;以及
40.图20表示了根据图19的xx-xx的侧视图。
具体实施方式
41.图1、2、3、4a、4b、5、6、7和7a表示了在第一实施例中具有tchebycheff四杆连杆机构悬架或tchebycheff机构的两轮机动车辆。
42.在图1、2和3中简要表示了机动车辆1。在这些视图中,移除或省略了对于理解悬架的结构和操作并不必需的机动车辆部件。机动车辆1包括框架3、后驱动轮5和前转向轮7。轮5和7通过悬架而与框架3连接。使驱动轮5与框架连接的后悬架未示出,并可以以任何已知的方式来设置。下面将详细介绍使前转向轮7与框架3连接的前悬架。
43.前转向轮7与可旋转臂9连接。该可旋转臂9与可旋转地容纳在转向管13中并可通过车把15来操作的转向柱11刚性连接,以便绕转向轴线a-a旋转。可旋转臂9绕轴线a-a的旋
转能够使车辆1转向。
44.前转向轮7通过总体用17表示的悬架而与可旋转臂9连接,该悬架允许框架3相对于前转向轮7进行悬架运动,该框架包括转向管13以及转向柱11、车把15和可旋转臂9。悬架17是减震悬架,它包括:连杆机构,该连杆机构在前转向轮7和可旋转臂9之间;以及减震器。该减震器又包括弹性元件和制动器或阻尼器。在所示实施例中,减震器用22表示,弹性元件用21表示,且制动器或阻尼器用19表示。该制动器或阻尼器同轴地容纳在呈螺旋弹簧的形式的弹性元件21内。
45.前转向轮7由悬架17支承,以便绕它自身的旋转轴线b-b旋转。
46.参考标号23表示机动车辆1的前制动器的盘。制动器还包括卡钳25,该卡钳25可以由悬架17以下面所述的方式来支承。
47.悬架17包括通过旋转对来彼此连接的部件,即根据单个自由度来相对彼此运动的部件,该单个自由度由绕相应铰链轴线的旋转运动来表示。
48.有利地,具有使前转向轮7与可旋转臂9连接的旋转对的运动系统包括所谓的tchebycheff四杆连杆机构或tchebycheff机构。除了可旋转臂9之外,该tchebycheff四杆连杆机构或tchebycheff机构还包括第一曲柄31和第二曲柄33。两个曲柄31和33铰接在可旋转臂9和连接杆35上,该连接杆35也是tchebycheff四杆连杆机构或tchebycheff机构的部件。第一曲柄31和第二曲柄33在布置用于与可旋转臂9和连接杆37连接的铰链的相应端部之间的中间点处交叉。插入悬架17中的tchebycheff四杆连杆机构的构造使得两个曲柄31、33在悬架17在行驶时能够采取的任何位置中都保持在交叉位置,即从悬架17的最大延伸位置至最大收缩位置。
49.更具体地说,第一曲柄31通过第一铰链31a而铰接在可旋转臂9上,并通过第二铰链31b而铰接在连接杆35上。再有,第二曲柄33通过第一铰链33a而铰接在可旋转臂9上,并通过第二铰链33b铰接在连接杆35上。铰链31a、31b、33a、33b表示tchebycheff四杆连杆机构的旋转对。
50.曲柄31和33具有大致相等的长度,并比连接杆35更短。部件31、33、35的长度将用于作为在相应铰链的轴线之间的距离。因此,例如第一曲柄31的长度由在铰链31a和31b的轴线之间的距离给出,第二曲柄33的长度由在铰链33a和33b的轴线之间的距离给出,且连接杆35的长度由在铰链31b和33b的轴线之间的距离给出。
51.更具体地说,在各曲柄的长度、铰链31a、33a之间的距离和铰链31b、33b之间的距离之间的比率等于5:4:2。
52.用37表示的轮支承件限制在连接杆35的限制点上,该限制点在铰链31b和33b的轴线之间基本等距,特别见图7。在实践中,轮支承件37确定了轮的旋转轴线b-b,并将所述轴线保持在铰链31b和33b的轴线之间的中间位置且与连接杆35正交。在图1至7的实施例中,盘式制动器23、25的卡钳25刚性地固定在轮支承件37上,如特别是在图7的分解图中可见。在所示实施例中,轮支承件37实际上包括支承前转向轮7的旋转轴的轴承的座。
53.在图1至7的实施例中,减震器22也铰接在连接杆35上。更特别是,减震器22在一端22a处铰接在可旋转臂9上,并在一端22b处铰接在连接杆35上。在减震器22以及一侧的可旋转臂9和另一侧的连接杆35之间的限制部可以包括球形铰链。
54.如从表示悬架17和减震器22的延伸位置和收缩位置的图4a、4b能够很容易地理
解,通过tchebycheff四杆连杆机构的变形运动而允许前转向轮7的悬架运动,更特别是通过曲柄31、33绕轴线31a、33a的枢转运动而允许,曲柄通过该轴线31a、33a而铰接在可旋转臂9上。这种枢转运动对应于连接杆35的旋转平移运动以及减震器22的压缩/延伸。tchebycheff四杆连杆机构的构造为这样,在图4a、图4b的两个位置中以及在它们之间的任何中间位置中,两个曲柄31和33彼此交叉。在曲柄的枢转运动的该范围内,连接杆37的中点的轨迹近似为直线,因此前转向轮7的旋转轴线b-b的轨迹近似为直线。
55.由于tchebycheff四杆连杆机构的特性,至少在曲柄31、33的特定摆动角度内,位于前转向轮7的旋转轴线b-b上的连接杆35的中心沿大致直线形轨迹运动。形成tchebycheff四杆连杆的元件安装成这样,使得前转向轮7的旋转轴线b-b的轨迹在从悬架17的最大延伸位置到最大收缩位置的整个行程中近似为直线。
56.从图7a的视图中可以很容易地理解到目前为止介绍的悬架的操作,在图7a中,它的部件示意地表示,并用相同参考标号来表示。该图表示了:减震器22的最大压缩位置(位置a)和减震器22的最大延伸位置(位置b)。
57.在本文中,术语“大约直线”、“大致直线”或“近似直线”的意思是在悬架的使用范围内(即在机动车辆正常使用时由tchebycheff四杆连杆机构呈现的任何位置)偏离完美直线轨迹的程度小于2mm且优选是小于1mm的轨迹。
58.参考图1至7介绍的实施例可以进行多种变化,一些变化在下面参考随后的附图来介绍。而且,减震器22可以相对于臂9和连接杆37与不同元件连接。通常,减震器22通过端部22a、22b而与悬架17的两个点连接,这两个点在悬架17的悬架运动过程中相对彼此运动。
59.如前所述,特别如图7中所示,盘式制动器23、25的卡钳25可以刚性地限制在连接杆35上。在这种情况下,卡钳25与连接杆35成一体地绕前转向轮7的旋转轴线b-b旋转。由于连接杆35的瞬时旋转中心位于靠近前转向轮7与地面的接触点,因此这可能有不可忽略的正俯冲(pro-drive)或防俯冲(anti-drive)效果。该瞬时旋转中心由分别连接铰链31a、31b和33a、33b的两个直线段的延伸部分的交点来确定。可能并不希望这种正俯冲或防俯冲效果。
60.为了避免或减少在制动过程中悬架的正俯冲或防俯冲效果,在一些实施例中,卡钳25能够与同轴安装在前转向轮7上的部件刚性连接,并因此与连接杆35连接,但并不与连接杆35成一体,且该连接杆35的瞬时旋转中心更远。
61.这种类型的实施例在图8、9、10、11和12中表示。在这些图中,相同参考标号表示与已经参考图1至7所述的部件相同或等效的部件,并将不再介绍。图12的分解图特别表示了盘式制动器的卡钳25的支承元件。支承部件用45表示。它可以有孔,轴承47容纳在该孔中,前转向轮7的旋转轴(未示出)或该轴的延伸部分插入在该轴承47中。tchebycheff四杆连杆机构的连接杆35也空转地支承在前转向轮7的旋转轴上。
62.部件45可以与减震器22的一端22b刚性连接。在减震器22和部件45之间的互锁限制使得卡钳25在制动过程中保持不绕前转向轮7的旋转轴线b-b旋转。由于连接杆35和卡钳25的支承部件45相对彼此空转,因此连接杆35和部件45能够绕旋转轴线b-b相对彼此自由地旋转。正俯冲或防俯冲效果非常有限或可忽略,因为在这种情况下卡钳刚性连接的部件包括减震器22,该减震器22示例的旋转中心布置得非常远,几乎在无穷远处。
63.上述悬架能够用于成摩托车形式的鞍座骑乘机动车辆中,如图1、2和3中示意所
示,但也能够用于其它类型的鞍座骑乘机动车辆,例如小型摩托车。
64.在图1至12所示的所有实施例中,使曲柄31、33与连接杆35和可旋转臂9连接的铰链布置成使得它们的铰链轴线彼此平行且平行于前转向轮7的旋转轴线b-b。这样,实质上,由部件9、31、33、35形成的tchebycheff四杆连杆机构位于与前转向轮7的旋转轴线b-b正交的平面中。tchebycheff四杆连杆机构的旋转对的旋转轴线因此定向成沿左右方向,即横过机动车辆1的中间平面。
65.尽管这产生了特别有效的悬架,但它不是四杆连杆机构悬架的唯一可能实施例,该四杆连杆机构悬架使用运动机构而允许在轮自身的悬架运动过程中获得前转向轮7的旋转轴线的大致直线形轨迹,该运动机构只包括旋转对而不包括棱柱形或圆柱形对,也就是,没有提供相对平移运动的部件。
66.在其它实施例中,使得形成tchebycheff四杆连杆机构的部件彼此连接的铰链可以布置成使得它们的轴线彼此平行且相对于前转向轮7的旋转轴线b-b定向成90
°
,也就是与包含前转向轮7的该旋转轴线b-b的平面正交。换句话说,使得tchebycheff四杆连杆机构的部件彼此连接的旋转对的铰链轴线定向成位于与机动车辆的中间平面平行的竖直平面上,即位于沿机动车辆的行进方向延伸的竖直平面上。
67.这种类型的实施例在图13至17中表示。与已经参考先前附图介绍的部件相对应的部件用相同参考标号加“100”来表示。在图13至图17中只表示了具有相应悬架117和可旋转臂109的前转向轮107,而未示出机动车辆,该机动车辆可以是类似于图1至3中用1表示的机动车辆。
68.图13至17表示了包括前转向轮107、可旋转臂109(该可旋转臂109有它的转向轴线a-a)以及悬架117(该悬架117有它的所有部件)的组件。更特别是,在该实施例中,悬架117设置有tchebycheff四杆连杆机构,该tchebycheff四杆连杆机构包括:可旋转臂109、第一曲柄131、第二曲柄133和连接杆135。实际上,各曲柄131、133是双曲柄。各曲柄的两个部件位于连接杆135的外侧,该连接杆135位于中心。连接杆135也是双连接杆,且在连接杆135的两个部件(特别是在图17的分解图中可见)之间有轮支承件137,该轮支承件137绕轴线c-c居中地铰接在连接杆135上。连接轮支承件137和连接杆135的铰链轴线c-c与前转向轮的旋转轴线b-b交叉,并与它正交。
69.第二曲柄131通过第一铰链131a而铰接在可旋转臂109上,并通过第二铰链131b而铰接在连接杆135上。同样,曲柄133通过第一铰链133a而铰接在可旋转臂109上,并通过第二铰链133b而铰接在连接杆135上。铰链131a、131b、133a、133b的轴线彼此平行,并相对于前转向轮107的旋转轴线b-b定向成90
°
。在该实施例中,tchebycheff四杆连杆机构的铰链的轴线的定向方向平行于轮支承件137与连接杆135的铰接轴线c-c。实际上,tchebycheff四杆连杆机构的铰链的轴线定向成与包含前转向轮107的旋转轴线b-b和基本平行于悬架运动方向的平面正交。
70.tchebycheff四杆连杆机构的部件之间的尺寸比与上面确定的相同。
71.在所示实施例中,轮支承件137有叉形状,它包围连接杆135,如图17中特别可见。轮支承件137还可以对于减震器122的连接限制。在图13至17所示的实施例中,在轮支承件137和减震器122之间的限制是互锁。
72.轮支承件137形成前转向轮107的轴的旋转座,在图中不可见。例如,轮支承件137
可以有用于轴承的壳体138(图17),前转向轮107的轴可旋转地插入该轴承中。也可选择,轮支承件137可以与旋转轴成一体,前转向轮107通过轴承而安装在该旋转轴上。
73.在前转向轮107的悬架运动过程中,悬架117的四杆连杆机构随着曲柄131、133相对于可旋转臂109的枢转运动以及因此连接杆135绕铰链轴线的枢转运动而变形,连接杆135通过该铰链轴线而与轮支承件137连接。由部件109、131、133、135形成的tchebycheff四杆连杆机构的构造也使得在悬架运动的整个范围内,在连接杆135和轮支承件137之间的铰接以及因此铰接轴线c-c沿近似直线轨迹运动。由于轮支承件137与减震器122刚性连接,因此连接杆135的枢转运动对前转向轮107的外倾角没有影响。
74.在到目前为止介绍的实施例中,已经参考了具有单个前转向轮7或107的两轮机动车辆。不过,本说明书的悬架也可以用于具有两个前转向轮的倾斜鞍座车辆,这两个前转向轮例如设置有能够保证机动车辆在驾驶时的滚转运动的一个或两个四杆连杆机构。图18、图19和图20示意表示了倾斜鞍座机动车辆201,该车辆有框架203、后驱动轮205以及两个相应的左前转向轮207x和右前转向轮207y。两个前转向轮207x、207y在车辆201的横向方向(即左右方向)上并排。
75.在图18、19和20示意表示的实施例中,参考标号209x和209y表示两个可旋转臂,具有与参考具有单个前转向轮的机动车辆的先前实施例所述的单个可旋转臂9、109相同的功能。各可旋转臂209x、209y用于绕转向轴线a-a旋转。
76.为此,各可旋转臂209x、209y可旋转地容纳在支承件或立柱226x、226y中,该支承件或立柱226x、226y是滚转四杆连杆机构220的一部分。两个支承件或立柱226x、22y分别通过上部横档222和下部横档224而彼此连接。横档222、224和支承件226x、226y形成滚转四杆连杆机构220,并绕铰链轴线铰接,该铰链轴线彼此平行,且位于沿机动车辆201的前后方向定向的平面中。
77.参考标号215表示车把,通过该车把,转向运动通过作用在转向杆230上的转向柱211而绕轴线a-a传递给支承臂209x、209y。
78.到目前为止介绍的滚转四杆连杆机构是自身已知,且不需要更详细说明。
79.各前转向轮207x、207y通过悬架217x、217y而与它自身的可旋转臂209x、209y连接,悬架217x、217y可以以参考图1至17所述的任何方式来制造。在图18、19和20中,悬架217x、217y如图1至7中设置。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
