技术特征:
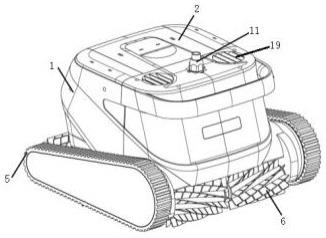
1.一种可侧向平移的泳池自动清洗机器人,其特征在于:包括壳体(1)和壳盖(2),壳体(1)内设置有控制器舱体(3),控制器舱体(3)为密封舱体且内部设置有控制电路,壳体(1)内设置有驱动电机(4),壳体(1)两侧设置有行进履带(5),壳体(1)底部设置清洗滚刷(6),驱动电机(4)通过传动机构驱动清洗滚刷(6)和行进履带(5);壳体(1)底部设置有进水口(101),进水口(101)上设置有过滤装置(7),壳盖(2)盖合在过滤装置(7)上方;壳体(1)顶部设置有两个排水口(102),排水口(102)下方设置有水流导管(8),水流导管(8)内设置有包括电机和旋叶的推进器(9),水流导管(8)相对设置,推进器(9)的电机、驱动电机(4)与控制电路电连接;通过排水口(102)处的水流反冲力实现机器人的侧向移动,实现方式为如下方式中的至少一种:方式一:推进器(9)轴线与所在的水流导管(8)轴线重合,推进器(9)轴线与x平面夹角为20
°
~45
°
,推进器(9)轴线与y平面夹角为20
°
~45
°
;方式二:排水口(102)处设置百叶窗式格栅(19),格栅叶片与x平面夹角为25
°
~55
°
,与y平面夹角为25
°
~55
°
;方式三:水流导管(8)位于壳体(1)内部或通过排水口(102)延伸到壳体(1)外部,且末端轴线与x平面夹角为20
°
~45
°
,与y平面夹角为20
°
~45
°
;方式四:水流导管(8)通过软管(25)与舵机(26)相连,舵机(26)轴线与x平面夹角为20
°
~45
°
,与y平面夹角为20
°
~45
°
;所述x平面为垂直于壳体(1)底面且两推进器(9)中心连线所在的平面,y平面为垂直于壳体(1)底面且与x平面垂直的平面。2.根据权利要求1所述的一种可侧向平移的泳池自动清洗机器人,其特征在于:所述壳体(1)前端和后端均设置有水位传感器。3.根据权利要求1所述的一种可侧向平移的泳池自动清洗机器人,其特征在于:所述控制电路上设置有压力传感器,控制器舱体(3)顶部设置有测试气孔(10)。4.根据权利要求1所述的一种可侧向平移的泳池自动清洗机器人,其特征在于:所述壳体(1)上设置有水密插接件(11),控制器舱体(3)与水密插接件(11)一端电连接,水密插接件(11)另一端通过电缆线(12)与控制终端连接。5.根据权利要求4所述的一种可侧向平移的泳池自动清洗机器人,其特征在于:所述电缆线(12)包括转动缆线(13)、转子(14)、定子(15)、固定缆线(16)和滑环外壳(18),所述定子(15)包括定子基座(1501)和第一pcb板(1502),定子基座(1501)底部设置有第一pcb板(1502),第一pcb板(1502)底部设置有导电顶针(1503),定子基座(1501)内密封设置有固定缆线(16),固定缆线(16)一端穿出定子(15)与控制终端连接,固定缆线(16)另一端与导电顶针(1503)电连接;所述转子(14)包括转子基座(1401)、第二pcb板(1402)、转子限位件(1403),转子基座(1401)顶部设置有第二pcb板(1402),第二pcb板(1402)顶部设置有导电滑道(1404),转子基座(1401)内密封设置有连接件(17),连接件(17)端部密封设置有转子限位件(1403),连接件(17)内密封设置有转动缆线(13),转动缆线(13)一端与导电滑道(1404)电连接,转动缆线(13)另一端穿出转子限位件(1403)与水密插接件(11)连接;定子(15)和转子(14)同轴设置,导电顶针(1503)与导电滑道(1404)接触,滑环外壳(18)穿设在定子(15)和转子(14)外侧壁上,滑环外壳(18)与定子(15)密封固定连接,滑环外壳(18)与转子(14)密封转动连接。
6.根据权利要求5所述的一种可侧向平移的泳池自动清洗机器人,其特征在于:所述连接件(17)由填充材料填充而成,定子基座(1501)与固定缆线(16)通过灌胶密封。7.根据权利要求5所述的一种可侧向平移的泳池自动清洗机器人,其特征在于:所述转子限位件(1403)为直管状,顶部向外延伸折弯有限位卡爪(1405),限位卡爪(1405)外壁与滑环外壳(18)内壁相适应,限位卡爪(1405)底部顶压在滑环外壳(18)内壁的台阶上。8.根据权利要求1所述的一种可侧向平移的泳池自动清洗机器人,其特征在于:所述驱动电机(4)设置有两个,分别位于控制器舱体(3)两侧,驱动电机(4)分别驱动对应侧的行进履带(5)。9.根据权利要求1所述的一种可侧向平移的泳池自动清洗机器人,其特征在于:所述排水口(102)上设置有百叶窗式的格栅(19)。
技术总结
本发明公开了一种可侧向平移的泳池自动清洗机器人,涉及泳池清洗机器人技术领域。所述泳池自动清洗机器人的壳体内设置有控制器舱体,控制器舱体为密封舱体且内部设置有控制电路,壳体内设置有驱动电机、两侧设置有行进履带、底部设置清洗滚刷,驱动电机通过传动机构驱动清洗滚刷和行进履带;壳体底部设置有进水口,进水口上设置有过滤装置,壳盖盖合在过滤装置上;壳体顶部设置有两个排水口,排水口下方设置有水流导管,水流导管内设置有包括电机和旋叶的推进器,水流导管相对设置,推进器的电机、驱动电机与控制电路电连接;通过排水口处的水流反冲力实现机器人的侧向移动。口处的水流反冲力实现机器人的侧向移动。口处的水流反冲力实现机器人的侧向移动。
技术研发人员:王思奥 李维伟 李晓龙 殷岚山 王哲 陈朝民
受保护的技术使用者:深圳潜行创新科技有限公司
技术研发日:2022.03.04
技术公布日:2022/4/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。