1.本发明属于水轮发电机组双调控制策略领域,尤其是适用于双调调速器的协联控制方法。
背景技术:
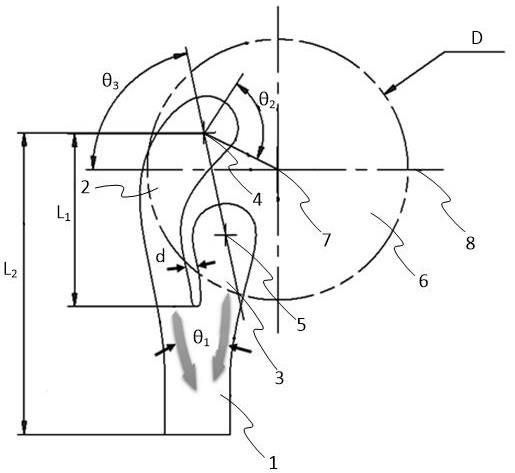
2.贯流或轴流转桨等水轮发电机组有两个调节机构:导叶和桨叶机构,这种调速器被称为双调调速器。其中导叶调节机构通过控制导叶开度来调整进入水轮机的进水量,桨叶调节机构通过控制桨叶角度来改变机组运行工况和机组效率,桨叶角度与水头和导叶开度在最佳协联状态时,机组效率最高。因此,如图1所示,双调调速器的桨叶角度与水头和导叶开度需遵循一定的函数关系。
3.传统的桨叶协联函数发生器,采用矩形网络图的方式,将不同水头时桨叶角度与导叶开度的对应值写入程序中,如图3所示。
4.程序运算时,根据当前的水头和导叶开度值在表中找到最接近的四个点,再采用插值法计算出桨叶角度。这种方法的缺点是数据量过大且桨叶线性度较差,机组运行很难达到最优工况。
技术实现要素:
5.本发明的目的在于克服现有技术的不足,提出适用于双调调速器的协联控制方法,采用曲面拟合的方法,得出双调控制中桨叶角度的协联函数,同时线性度良好,数据量少,能保证机组以发电效率最高的方式运行。
6.本发明解决其技术问题是采取以下技术方案实现的:
7.适用于双调调速器的协联控制方法,包括以下步骤:
8.步骤1、根据水轮发电机组的协联曲线图,选取不同导叶开度值,并提取特征点及其特征信息;
9.步骤2、根据步骤1提取的特征点及其特征信息构建适用于双调调速器的协联计算模型;
10.步骤3、将需要计算的导叶开度值和水头带入步骤2中进行计算,得到桨叶转角的当前值,最后根据桨叶转角的当前值对双调调速器的桨叶进行控制。
11.而且,所述步骤1的包括以下步骤:
12.步骤1.1、根据水轮发电机组的协联曲线图,选取不少于5个导叶开度值作为特征值,在协联曲线图的x轴上标记这些导叶开度特征值,并以这些点作顶点沿y轴的方向做垂直于x轴的直线,所述y轴表示桨叶转角,所述x轴表示导叶开度;
13.步骤1.2、根据步骤1.1做出的直线,选取这些直线与协联曲线图上每组曲线的交点作为特征点,特征点对应的水头、导叶开度和桨叶转角作为特征信息。
14.而且,所述步骤2中协联计算模型为:
[0015][0016]
其中,为桨叶角度的当前值,α为导叶开度,αi为导叶开度的当前值,系数矩阵k中k
00
、k
01
、k
02
、k
01
、k
10
、k
11
、k
12
、k
20
、k
21
和k
22
为多项式中的各阶系数,hi为水头的当前值。
[0017]
而且,所述系数矩阵k的计算方法为:
[0018][0019][0020][0021][0022]
其中,矩阵a为导叶开度特征矩阵,α0、α1、α2、α3、α4和α5为导叶开度特征值,矩阵h为水头特征矩阵,h0、h1、h2、h3、h4和h5为协联曲线中每组曲线对应的水头值,矩阵b为桨叶转角特征矩阵,特征矩阵,特征矩阵,和为选取的特征点对应的桨叶转角值。
[0023]
本发明的优点和积极效果是:
[0024]
本发明通过水轮发电机组的协联曲线图,得到水轮发电机组在不同水头时,导叶开度和桨叶转角的关系,采用曲面拟合的方法,得到双调控制中桨叶角度的协联函数,根据双调控制中桨叶角度的协联函数以及当前的水头和导叶开度进行计算,得到当前水头下桨叶转角的当前值,最后根据桨叶转角的当前值对双调调速器的桨叶进行控制。本发明采用
曲面拟合的方法,得到的双调控制中桨叶角度的协联函数线性度良好,数据量少,能够保证水轮发电机组以发电效率最高的方式运行。
附图说明
[0025]
图1为水轮发电机组的协联曲线图;
[0026]
图2为水轮发电机组的协联曲线特征点分布图;
[0027]
图3为不同水头时桨叶角度与导叶开度的对应值。
具体实施方式
[0028]
以下结合附图对本发明做进一步详述。
[0029]
适用于双调调速器的协联控制方法,包括以下步骤:
[0030]
步骤1、如图2所示,根据水轮发电机组的协联曲线图,选取不少于5个导叶开度值作为顶点,作x轴的垂线,并提取特征点及其特征信息。
[0031]
步骤1.1、根据水轮机组制造厂家拿到水轮发电机组的协联曲线图,协联曲线图是在平面直角坐标系中的一组曲线图,每组曲线对应不同的水头,y轴表示桨叶转角,协联曲线图的x轴表示导叶开度,取值范围0%-100%,选取不少于5个导叶开度值作为特征值,在协联曲线图的x轴上标记这些导叶开度特征值,并以这些特征点作顶点沿y轴的方向做垂直于x轴的直线。
[0032]
步骤1.2、根据步骤1.1选取的导叶开度特征值,分别用α0、α1、α2、α3、α4和α5表示,在协联曲线图上画出x=α0、x=α1、x=α2、x=α3、x=α4和x=α5等六条垂直于x轴的直线,纵轴为桨叶开度协联曲线图中的每条曲线为不同水头(每条曲线对应的水头用h0、h1、h2、h3、h4和h5表示)时对应的桨叶转角,根据导叶开度特征值做出的六条直线与图中的六条协联曲线相交的交点即为特征点,特征点的纵坐标即桨叶转角,分别用线相交的交点即为特征点,特征点的纵坐标即桨叶转角,分别用线相交的交点即为特征点,特征点的纵坐标即桨叶转角,分别用和表示。
[0033]
步骤2、根据步骤1提取的特征点及其特征信息构建适用于双调调速器的协联计算模型,并计算模型参数。
[0034]
根据水轮机厂家提供的协联曲线,用二次多项式表征当导叶开度为常量、水头为变量时的桨叶角度:
[0035][0036]
其中,为桨叶角度的当前值,hi为水头的当前值,a0、a1为a2为多项式中的各阶系数。
[0037]
参数a0、a1和a2是导叶开度的函数,也用二次多项式表征,当导叶开度α=αi时,得到:
[0038][0039]
其中,α为导叶开度,αi为导叶开度的当前值,系数矩阵k中k
00
、k
01
、k
02
、k
01
、k
10
、k
11
、k
12
、k
20
、k
21
和k
22
为多项式中的各阶系数。
[0040]
将上述两式进行合并后得到:
[0041][0042]
进而简化得到:
[0043][0044]
将曲线h0上的特征点带入上式可得:
[0045][0046]
使用矩阵表示得到:
[0047][0048]
同理,h1、h2、h3、h4和h5上的特征点通过矩阵表示为:
[0049][0050][0051][0052]
[0053][0054]
将用矩阵表示的h0、h1、h2、h3、h4和h5上的特征点进行合并得到:
[0055][0056]
得到系数矩阵k的为:
[0057][0058]
确定适用于双调调速器的协联函数为:
[0059][0060][0061][0062]
[0063][0064]
根据上述适用于双调调速器的协联控制方法,进行程序设计,并通过某水轮发电机组的协联曲线图进行检测。
[0065]
通过某水轮发电机组的协联曲线图计算出系数矩阵k,其中参数矩阵在程序设计时分别用k00、k01、k02、k10、k11、k12、k20、k21和k22表示;
[0066]
在程序初始化中通过伪指令定义成宏:
[0067]
#define k00____
[0068]
#define k01____
[0069]
#define k02____
[0070]
#define k10____
[0071]
#define k11____
[0072]
#define k12____
[0073]
#define k20____
[0074]
#define k21____
[0075]
#define k22____
[0076]
程序运行时,读取当前的导叶开度值αi(程序中用ai表示)和水头值hi(程序中用hi表示),进行计算得到的计算结果bi即为需要的桨叶转角程序计算过程如下:
[0077]
a0=1;
[0078]
al=ai;
[0079]
a2=ai*ai;
[0080]
h0=1;
[0081]
h1=hi;
[0082]
h2=hi*hi;
[0083]
ak0=e0*k00 a1*k10 a2*k20;
[0084]
ak1=al*k01 al*k11 a2*k21;
[0085]
ak2=a0*k02 al*k12 a2*k22;
[0086]
bi=ak0*h0 ak1*h1 ak2*h2;
[0087]
最后根据桨叶转角的当前值对双调调速器的桨叶进行准确控制,从而保证水轮发电机组以发电效率最高的方式运行。
[0088]
需要强调的是,本发明所述的实施例是说明性的,而不是限定性的,因此本发明包括并不限于具体实施方式中所述的实施例,凡是由本领域技术人员根据本发明的技术方案
得出的其他实施方式,同样属于本发明保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。