1.本发明属于机器人力学分析技术领域,尤其涉及一种多自由度多功能高负载液压机械臂刚柔耦合分析方法。
背景技术:
2.对于液压机械臂的力学分析是机器人设计以及机器人工作运行期间的必要环节,通常采用刚柔耦合分析方法,但是对于多个自由度和/或多个功能以及高负载的情况下,对液压机械臂进行刚柔耦合分析,理论上将机械臂整体柔性化处理得到的分析结果精确度最高,但这无疑会增加求解难度,极易导致分析失败,因此从计算效率上讲现有技术的刚柔耦合分析方法并不现实。
技术实现要素:
3.本发明的目的是提供一种多自由度多功能高负载液压机械臂刚柔耦合分析方法,基于各工作臂铰接点载荷动态仿真以及静力学分析结果获得,两种极端工况下三臂受力形式最为复杂、受力特点最为危险,而且局部应力梯度变化较大,在实际工作过程中容易产生疲劳破坏和开裂变形,由此确定三臂为两种工况下的危险构件;然后仅对优化后三臂进行柔性化处理并在两种极端工况下分别对其进行刚柔耦合分析,由此明确了分析方向,简化了力分析的工作量和工作流程,为机械臂工作期间的实时力学分析提供了基础。
4.在adams中创建柔性体通常有两种方法,一种是在adams自带的“adams/flex”模块中创建柔性体,但基于这种方法建立的柔性体网格相对粗糙、过程比较繁琐易出错、计算精度低;而采用模态中性文件法可以有效解决网格精度低的问题,首先通过专业的有限元软件控制构件的网格划分精度,然后对其模态进行求解,并输出模态中性mnf文件(modal neutral file),最后将该mnf文件导入adams进行后续处理即可。
5.因此,本发明基于模态中性文件法利用hypermesh“radioss”模块求解模态中性文件,将对应的mnf文件导入adams中进行刚柔耦合模型的创建
6.本发明一方面提供了一种多自由度多功能高负载液压机械臂刚柔耦合分析方法,包括:
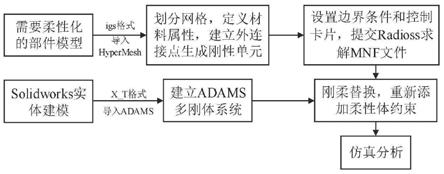
7.步骤1,建立柔性体模型从而获得模态中性mnf文件;
8.步骤2,建立adams多刚体系统;
9.步骤3,确定三臂为两种工况下的危险构件,进行刚柔替换,并重新添加柔性体约束,得到优化后的机械臂在两种工况下的刚柔耦合模型,所述两种工况为搬运工况和挖掘工况;
10.步骤4,基于所述两种工况下的刚柔耦合模型进行仿真分析。
11.优选的,所述步骤1包括:
12.步骤11,以igs格式将需要柔性化的部件模型导入hypermesh;
13.步骤12,划分网格;
14.步骤13,定义材料属性,根据重新定义优化后三臂的材料属性以保证adams 与hypermesh数据交互时单位的一致;
15.步骤14,建立外连接点生成刚性单元,所述连接点是在柔性体导入adams 后唯一可以被识别的节点,也是刚性体和柔性体间进行装配时的连接点;
16.步骤15,设置边界条件和控制卡片,提交radioss求解mnf文件。
17.优选的,所述步骤12采用与静力学分析时相同的网格划分方式,在 hypermesh中对优化后的三臂重新进行网格划分。
18.优选的,所述步骤14利用hypermesh在优化后三臂各铰接点轴孔的圆心处建立连接点,并以连接点为主节点,轴孔内表面节点为从节点建立rbe2刚性单元,约束连接点的六个自由度。
19.优选的,所述步骤15设置后处理控制卡片包括:设置刚性节点为多点约束、定义模态综合法为约束模态、输出类型设置为mnf文件、变换柔性体单位与adams 一致、调用模态综合法以及设置输出stress结果。
20.优选的,所述步骤2包括:
21.步骤21,进行soilidworks实体建模,并以x_t格式导入adams;
22.步骤22,建立adams多刚体系统。
23.优选的,所述步骤3包括:
24.步骤31,在adams中打开救援机械臂虚拟样机仿真模型,选定优化后三臂的刚体模型,通过“make flexible”命令将创建好的三臂柔性体mnf文件进行导入;
25.步骤32,成功导入后原三臂刚性体会自动被柔性体替换,将原三臂刚性体约束全部删除并重新对替换的柔性体进行约束;
26.步骤33,导入三臂柔性体进行替换并重新添加约束,得到优化后机械臂在搬运和挖掘工况下的刚柔耦合模型。
27.本发明的第二方面,提供一种多自由度多功能高负载液压机械臂刚柔耦合分析装置,包括:
28.模态中性mnf文件建立模块,用于建立柔性体模型从而获得模态中性mnf 文件;
29.adams多刚体系统建立模块,用于建立adams多刚体系统;
30.刚柔替换模块,用于确定三臂为两种工况下的危险构件,进行刚柔替换,并重新添加柔性体约束,得到优化后的机械臂在两种工况下的刚柔耦合模型,所述两种工况为搬运工况和挖掘工况;
31.仿真模块,用于基于所述两种工况下的刚柔耦合模型进行仿真分析。
32.本发明的第三方面提供一种电子设备,包括处理器和存储器,所述存储器存储有多条指令,所述处理器用于读取所述指令并执行如第一方面所述的方法。
33.本发明的第四方面提供一种计算机可读存储介质,所述计算机可读存储介质存储有多条指令,所述多条指令可被处理器读取并执行如第一方面所述的方法。
34.本发明提供一种多自由度多功能高负载液压机械臂刚柔耦合分析方法、装置和电子设备,具有如下有益效果:
35.基于各工作臂铰接点载荷动态仿真以及静力学分析结果获得,两种极端工况下三臂受力形式最为复杂、受力特点最为危险,而且局部应力梯度变化较大,在实际工作过程中
容易产生疲劳破坏和开裂变形,由此确定三臂为两种工况下的危险构件;然后仅对优化后三臂进行柔性化处理并在两种极端工况下分别对其进行刚柔耦合分析,由此明确了分析方向,简化了力分析的工作量和工作流程,为机械臂工作期间的实时力学分析提供了基础。
附图说明
36.图1为本发明提供的多自由度多功能高负载液压机械臂刚柔耦合分析方法流程图。
37.图2为本发明提供的多自由度多功能高负载液压机械臂刚柔耦合分析方法优化后三臂hypermesh中网格划分示意图。
38.图3为本发明提供的多自由度多功能高负载液压机械臂刚柔耦合分析方法优化后三臂各连接点创建后的示意图,其中图3(a)为正视剖面图;图3(b) 为侧视剖面图。
39.图4为本发明提供的多自由度多功能高负载液压机械臂刚柔耦合分析方法三臂柔性体替换示意图。
40.图5(a)为本发明提供的多自由度多功能高负载液压机械臂刚柔耦合分析方法搬运工况下机械臂刚柔耦合模型图。
41.图5(b)为本发明提供的多自由度多功能高负载液压机械臂刚柔耦合分析方法挖掘工况下机械臂刚柔耦合模型图。
42.图6为本发明提供的多自由度多功能高负载液压机械臂刚柔耦合分析方法搬运工况下柔性体三臂动应力云图及动应力最大时机械臂姿态图。
43.图7为本发明提供的多自由度多功能高负载液压机械臂刚柔耦合分析方法快速搬运下优化后三臂最大热点应力所在位置示意图。
44.图8为快速搬运工况下节点10604应力时间历程曲线图。
45.图9为本发明提供的电子设备一种实施例的结构示意图。
具体实施方式
46.下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。以下实施例用于说明本发明,但不用来限制本发明的范围。
47.实施例一
48.提供一种多自由度多功能高负载液压机械臂刚柔耦合分析方法,基于各工作臂铰接点载荷动态仿真以及静力学分析结果获得,两种极端工况下三臂受力形式最为复杂、受力特点最为危险,而且局部应力梯度变化较大,在实际工作过程中容易产生疲劳破坏和开裂变形,由此确定三臂为两种工况下的危险构件;然后仅对优化后三臂进行柔性化处理并在两种极端工况下分别对其进行刚柔耦合分析,由此明确了分析方向,简化了力分析的工作量和工作流程,为机械臂工作期间的实时力学分析提供了基础。
49.在adams中创建柔性体通常有两种方法,一种是在adams自带的“adams/flex”模块中创建柔性体,但基于这种方法建立的柔性体网格相对粗糙、过程比较繁琐易出错、计算精度低;而采用模态中性文件法可以有效解决网格精度低的问题,首先通过专业的有限元软件控制构件的网格划分精度,然后对其模态进行求解,并输出模态中性mnf文件(modal neutral file),最后将该mnf文件导入adams进行后续处理即可。
50.该实施例基于模态中性文件法利用hypermesh“radioss”模块求解模态中性文件,将对应的mnf文件导入adams中进行刚柔耦合模型的创建
51.实施例一提供了一种多自由度多功能高负载液压机械臂刚柔耦合分析方法,包括:
52.步骤1,建立柔性体模型从而获得模态中性mnf文件;
53.步骤2,建立adams多刚体系统;
54.步骤3,确定三臂为两种工况下的危险构件,进行刚柔替换,并重新添加柔性体约束,得到优化后的机械臂在两种工况下的刚柔耦合模型,所述两种工况为搬运工况和挖掘工况;
55.步骤4,基于所述两种工况下的刚柔耦合模型进行仿真分析。
56.作为优选的实施方式,所述步骤1包括:
57.步骤11,以igs格式将需要柔性化的部件模型导入hypermesh;
58.如图2所示,步骤12,划分网格:由于ansys“apdl”模块网格划分过程比较繁琐还易出错,网格质量和精度较低,而hypermesh具有强大的网格划分和几何模型处理功能,因此采用与静力学分析时相同的网格划分方式,在 hypermesh中对优化后的三臂重新进行网格划分;
59.步骤13,定义材料属性:根据重新定义优化后三臂的材料属性以保证adams 与hypermesh数据交互时单位的一致;
60.如图3(a)和3(b)所示,步骤14,建立外连接点生成刚性单元:连接点是在柔性体导入adams后唯一可以被识别的节点,也是刚性体和柔性体间进行装配时的连接点,利用hypermesh在优化后三臂各铰接点轴孔的圆心处建立连接点,并以连接点为主节点,轴孔内表面节点为从节点建立rbe2刚性单元,约束连接点的六个自由度;
61.步骤15,设置边界条件和控制卡片,提交radioss求解mnf文件:设置后处理控制卡片,如表1所示。
[0062][0063]
作为优选的实施方式,所述步骤2包括:
[0064]
步骤21,进行soilidworks实体建模,并以x_t格式导入adams;
[0065]
步骤22,建立adams多刚体系统。
[0066]
作为优选的实施方式,所述步骤3包括:
[0067]
步骤31,在adams中打开救援机械臂虚拟样机仿真模型,选定优化后三臂的刚体模型,通过“make flexible”命令将上述创建好的三臂柔性体mnf文件进行导入,如图4所示;
[0068]
步骤32,成功导入后原三臂刚性体会自动被柔性体替换,为保证所建刚柔耦合模型的准确性需要将原三臂刚性体约束全部删除并重新对替换的柔性体进行约束;
[0069]
步骤33,导入三臂柔性体进行替换并重新添加约束,得到优化后机械臂在搬运和挖掘工况下的刚柔耦合模型分别如图5(a)、图5(b)所示。
[0070]
(一)模态中性文件的验证
[0071]
首先将导入前的三臂有限元模型在hypermesh中进行模态分析,得到对系统动态响应影响较大的前6阶低阶模态,同时在adams中查看导入后的三臂柔性体前6阶模态,并将两者模态分析结果进行对比,如表2所示,通过对比结果可知两款软件所求解出的优化后三臂模态固有频率相对误差仅为0.12%,因此证明导入后的模态中性文件是正确的,同时也说明建立的优化后三臂柔性体模型的正确性,可以进行后续的刚柔耦合分析。
[0072][0073]
(二)机械臂搬运工况下三臂动态强度分析
[0074]
机械臂运动过程中产生的加速度和冲击惯性力对三臂受力影响较大,因此为研究搬运工况下机械臂快速运动过程中三臂结构强度是否存在安全隐患,设置液压缸位移驱动函数,控制各液压缸以0.15m/s的速度运动的同时使得机械臂在的整个工作范围内(不考虑底座回转)快速运动,得到柔性体三臂的动应力云图、机械臂搬运工况下各液压缸位移驱动step函数(表2)及动应力最大时机械臂姿态如图6所示。
[0075][0076]
分析图6可知,在搬运工况下,当各液压缸以0.15m/s的伸缩速度带动机械臂快速运动的过程中,优化后三臂动应力最大值为64.19mpa,远小于材料的屈服极限。此时大臂油
缸全缩、二臂和三臂油缸全伸、摆动架油缸伸长量为225mm,机械臂即将到达最高位置。
[0077]
通过adams“durability”(耐久性)模块查看相应的应力热点信息,如图7所示。通过表3所示的热点应力信息列表可获得最大应力发生的时间和对应的节点编号等信息,进而得到最大热点应力值所处位置如图8所示。
[0078]
表3快速搬运工况下优化后三臂应力热点信息
[0079][0080]
由表3可知,在机械臂快速搬运工况下,优化后三臂最大动应力值为 64.19mpa,出现在底面与三臂液压杆铰接轴孔耳板后方接合面处,所对应的节点为10604,利用“durability”模块下的“nodal plots”命令生成该节点处应力随时间的变化曲线,如图8所示。
[0081]
分析图8可知,在快速搬运工况下,优化后三臂动应力值在第8s到第16s 之间波动较为频繁,这是由于此阶段机械臂从最高点快速向最低点运动,三臂受到运动加速度和惯性冲击的作用最为强烈,同时还受到各液压缸频繁启停所产生的加速度和冲击的影响,导致应力值频繁波动,与前文分析的三臂受力影响因素以及实际情况相符合。
[0082]
综合以上搬运工况下三臂动态强度分析过程可知,优化后三臂动应力最大值为64.19mpa,略大于优化前三臂静力学分析所得最大应力值63mpa,不仅说明了拓扑优化后的三臂结构模型能够克服运动加速度、惯性冲击、弹性振动以及小位移结构变形等复杂耦合作用的影响,证明经过两次拓扑优化后所得三臂轻量化模型的可靠性。
[0083]
实施例二,
[0084]
一种多自由度多功能高负载液压机械臂刚柔耦合分析装置,包括:
[0085]
模态中性mnf文件建立模块,用于建立柔性体模型从而获得模态中性mnf 文件;
[0086]
adams多刚体系统建立模块,用于建立adams多刚体系统;
[0087]
刚柔替换模块,用于确定三臂为两种工况下的危险构件,进行刚柔替换,并重新添加柔性体约束,得到优化后的机械臂在两种工况下的刚柔耦合模型,所述两种工况为搬运工况和挖掘工况;
[0088]
仿真模块,用于基于所述两种工况下的刚柔耦合模型进行仿真分析。
[0089]
该装置可实现上述实施例一提供的分析方法,具体的实现方法可参见实施例一中的描述,在此不再赘述。
[0090]
本发明还提供了一种存储器,存储有多条指令,所述指令用于实现如实施例一所述的方法。
[0091]
如图9所示,本发明还提供了一种电子设备,包括处理器301和与所述处理器301连接的存储器302,所述存储器302存储有多条指令,所述指令可被所述处理器加载并执行,以使所述处理器能够执行如实施例一所述的方法。
[0092]
本实施例通过提供一种多自由度多功能高负载液压机械臂刚柔耦合分析方法和装置,基于各工作臂铰接点载荷动态仿真以及静力学分析结果获得,两种极端工况下三臂受力形式最为复杂、受力特点最为危险,而且局部应力梯度变化较大,在实际工作过程中容易产生疲劳破坏和开裂变形,由此确定三臂为两种工况下的危险构件;然后仅对优化后三臂进行柔性化处理并在两种极端工况下分别对其进行刚柔耦合分析,由此明确了分析方向,简化了力分析的工作量和工作流程,为机械臂工作期间的实时力学分析提供了基础。
[0093]
尽管已描述了本发明的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例作出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本发明范围的所有变更和修改。显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
