技术特征:
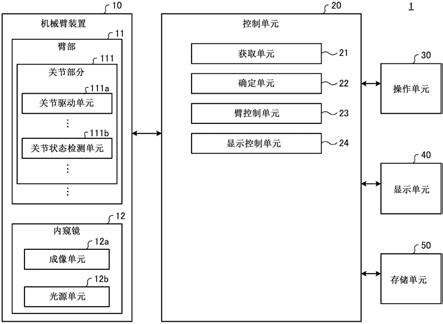
1.一种医疗支撑臂,包括:支撑臂,支撑内窥镜;臂控制单元,被配置为使得支撑臂执行多个不同的干扰避免操作,以避免所述内窥镜和手术工具之间的干扰,同时保持所述内窥镜的物镜指向观察目标的状态;以及确定单元,确定多个干扰避免操作的操作量的组合。2.根据权利要求1所述的医疗支撑臂,其中,所述臂控制单元被配置为使得所述支撑臂执行作为干扰避免操作的第一干扰避免操作和不同于所述第一干扰避免操作的第二干扰避免操作,并且所述确定单元确定第一干扰避免操作的操作量和第二干扰避免操作的操作量的组合。3.根据权利要求2所述的医疗支撑臂,其中,所述第一干扰避免操作是移动所述内窥镜以使所述内窥镜的所述物镜远离所述观察目标的移除操作,所述第二干扰避免操作是移动所述内窥镜以改变所述观察目标的观察方向的旋转操作,并且所述确定单元确定移除操作的操作量和旋转操作的操作量的组合。4.根据权利要求3所述的医疗支撑臂,其中,所述确定单元基于仅通过移除操作避免干扰手术工具的情况下的移除操作的最小操作量和仅通过旋转操作避免干扰手术工具的情况下的旋转操作的最小操作量之间的比率,来确定移除操作的操作量和旋转操作的操作量的组合。5.根据权利要求4所述的医疗支撑臂,其中,所述确定单元通过计算预定的干扰避免操作中的所述比率并将所计算的比率应用于设计信息来确定移除操作的操作量和旋转操作的操作量的组合,在所述设计记录信息中,记录了任意比率和能够以该任意比率避免干扰的组合之间的关系。6.根据权利要求5所述的医疗支撑臂,其中,所述设计信息是程序图的信息,在所述程序图中,第一轴表示移除操作的操作量,并且与所述第一轴正交的第二轴表示旋转操作的操作量。7.根据权利要求5所述的医疗支撑臂,其中,所述确定单元通过针对由操作者执行的每个治疗使用不同的设计信息来确定移除操作的操作量和旋转操作的操作量的组合。8.根据权利要求7所述的医疗支撑臂,其中,由操作者执行的治疗至少包括第一治疗和要求比所述第一治疗更精确的第二治疗,所述设计信息包括第一设计信息和第二设计信息,第二设计信息被设计成使得在至少一些情况下移除操作的操作量小于第一设计信息的操作量,并且所述确定单元在执行第一治疗的情况下基于所述第一设计信息确定移除操作的操作量和旋转操作的操作量的组合,并且所述确定单元在执行第二治疗的情况下基于所述第二设计信息确定移除操作的操作量和旋转操作的操作量的组合。9.根据权利要求8所述的医疗支撑臂,其中,所述第一治疗是抽吸体内液体的治疗,并且所述第二治疗是夹住血管的治疗。10.根据权利要求7所述的医疗支撑臂,其中,由操作者执行的治疗包括抽吸体内液体的治疗、夹住血管的治疗、缝合治疗、剥离处理和切除处理中的至少一种。
11.根据权利要求10所述的医疗支撑臂,其中,由操作者执行的治疗至少包括切除处理,并且所述确定单元对操作者为了切除而用手术工具夹住组织的时间和进行切除的时间中的每一个确定不同的组合。12.根据权利要求5所述的医疗支撑臂,其中,所述确定单元通过使用基于与操作者要治疗的部位周围的区域的尺寸有关的信息而选择的设计信息,来确定移除操作的操作量和旋转操作的操作量的组合。13.一种医疗系统,包括:支撑臂,支撑内窥镜;以及控制装置,控制支撑臂,其中,所述控制装置包括:臂控制单元,所述臂控制单元被配置为使得支撑臂执行多个不同的干扰避免操作,以避免所述内窥镜和手术工具之间的干扰,同时保持所述内窥镜的物镜指向观察目标的状态;以及确定单元,所述确定单元确定多个干扰避免操作的操作量的组合。
技术总结
一种医疗支撑臂,包括:支撑臂,支撑内窥镜;臂控制单元,被配置为使得支撑臂执行多个不同的干扰避免操作,以避免内窥镜和手术工具之间的干扰,同时保持内窥镜的物镜指向观察目标的状态;以及确定单元,确定多个干扰避免操作的操作量的组合。作的操作量的组合。作的操作量的组合。
技术研发人员:长尾大辅
受保护的技术使用者:索尼集团公司
技术研发日:2020.08.07
技术公布日:2022/4/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。