1.本发明涉及遥感技术领域,尤其涉及一种光学卫星遥感影像检测方法。
背景技术:
2.遥感影像(简称:rs,英文:remote sensing image)是指记录各种地物电磁波大小的胶片或照片,主要分为航空像片和卫星相片。随着光学卫星遥感影像的快速发展,这一技术在国土防御、区域侦察等军事应用领域,灾害监测、应急救灾、防灾预警等民用领域都有着极其重要的作用。
3.申请号202110879945.5的中国专利公开了一种遥感卫星影像数据的处理方法,包括如下步骤:s1、利用信源编码为不同区域的遥感卫星影像数据分配独立的数据标识,并在数据缓存单元设置独立的逻辑编号;s2、根据数据缓存单元中数据的逻辑编号,完成各区域遥感卫星影像数据的依次输出;s3、采用基于vgg16网络的两阶段检测器实现遥感卫星影像数据中目标的检测;s4、基于连通分量外接矩形的长宽比实现遥感卫星影像数据中目标尺寸的测量;s5、以超链接的形式在每一张遥感影像上标记其对应的目标检测结果和目标尺寸测量结果;s6、为每一张遥感影像在数据库内找到合适的位置,完成遥感影像数据的定位储存。然而,目前遥感卫星应用效能飞速提升,遥感卫星获取的数据量呈几何级数增长,上述方法对遥感卫星影像数据的处理时间过长,存在遥感数据处理不及时的情况,处理效率仍有待进一步提升。因此,有必要提出一种光学卫星遥感影像检测方法,以解决上述问题。
技术实现要素:
4.本发明提供一种光学卫星遥感影像检测方法,以解决现有方法对遥感卫星影像数据的处理时间过长,存在遥感数据处理不及时的情况,处理效率仍有待进一步提升的问题。
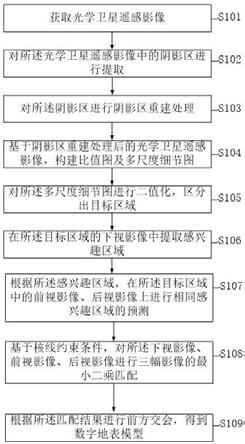
5.本发明提供一种光学卫星遥感影像检测方法,包括:获取光学卫星遥感影像;对所述光学卫星遥感影像中的阴影区进行提取;对所述阴影区进行阴影区重建处理;基于阴影区重建处理后的光学卫星遥感影像,构建比值图及多尺度细节图;对所述多尺度细节图进行二值化,区分出目标区域;在所述目标区域的下视影像中提取感兴趣区域;根据所述感兴趣区域,在所述目标区域中的前视影像、后视影像上进行相同感兴趣区域的预测;基于核线约束条件,对所述下视影像、前视影像、后视影像进行三幅影像的最小二乘匹配;根据所述匹配结果进行前方交会,得到数字地表模型。
6.进一步地,对所述光学卫星遥感影像中的阴影区进行提取,包括:建立原始图像的梯度图;在梯度图中选择出点建立二值图;对二值图每个亮区求图像平均灰度;判断图像平均灰度是否大于预设阈值;如果图像平均灰度大于预设阈值,去除二值图对应区域以及二值图中的小图斑,得到基本阴影区;将每一图斑用灰度形态学的方法向外膨胀,新增加的像素点是灰度值与附近阴影区平均灰度值变化小于预定范围的点,一直扩展到梯度及灰度变化大于预定范围的边沿部分结束,得到阴影区。
7.进一步地,对所述光学卫星遥感影像中的阴影区进行提取,还包括:对二值图中亮
区部分求出梯度的分布,确定低梯度点占总数的百分比;判断低梯度点占总数的百分比是否高于预设阈值;如果所述百分比高于预设阈值,识别为水系,从阴影区去除;对阴影区作灰度直方图分析,若在低灰度区及中灰度区有两个明显的峰值,根据直方图的谷值,去除高灰度的像素后得到的区域作为阴影区。
8.进一步地,对所述光学卫星遥感影像中的阴影区进行提取,还包括:获取基本阴影区的高梯度边界,对边界内每一像素点在太阳方位角的方向上作hough变换投影;针对累积点数较大的极值位置作线性检测,检测首尾部分是否有明显的长直线,或是检测区域中是否存在多个较长的平行线段;如果有明显的长直线或存在多个较长的平行线段,确定该区域边界与太阳方位角相关为阴影区,否则认为是其他特殊地物。
9.进一步地,对所述光学卫星遥感影像中的阴影区进行提取,还包括:将二值图上表现为白色区域中的黑色区域填充成白色,得到完整的阴影内部区域。
10.进一步地,对所述光学卫星遥感影像中的阴影区进行提取,还包括:在阴影区外沿建立边界区;读取边界区的梯度值;找出最大梯度的位置,在边界区内跟踪出一条最大梯度的封闭曲线为边界线;在边界线内部作填充,得到边界清晰的阴影区。
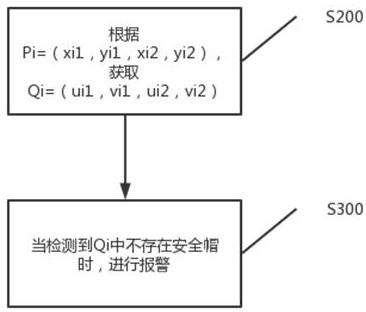
11.进一步地,在所述目标区域的下视影像中提取感兴趣区域,包括:建立目标区域的下视影像中当前成像行的严格成像模型;计算当前成像行首尾端点的地理坐标,得到点p0,q0;从t0时刻开始,每隔δt时间,重复上述步骤,对当前成像行首尾端点的地理坐标进行实时计算,在t1=t0 δt时刻得到点p1,q1;判断感兴趣区域中心点是否位于矩形(p0,q0,p1,q1)内,如果感兴趣区域中心点不位于矩形(p0,q0,p1,q1)内,则δt时间后继续重复上述计算;如果感兴趣区域中心点位于矩形(pi,qi,pi 1,qi 1)内,计算该点准确图像坐标和感兴趣区域范围。
12.进一步地,计算该点准确图像坐标和感兴趣区域范围之后,所述方法还包括:获取相对辐射校正系数,建立相对辐射校正系数查找表;根据感兴趣区定位结果,获取感兴趣区域对应图像的探元成像范围;依据成像增益、级数信息,在相对辐射校正系数查找表中查找对应的相对辐射校正系数;根据下式计算校正后影像灰度;式中,为相对辐射校正后第i号探元的dn值,i为原始图像第i号探元的dn值,为第i号探元的偏移值,为第i号探元的归一化増益。
13.进一步地,计算校正后影像灰度之后,所述方法还包括:基于原始多片ccd建立覆盖整景影像范围的全视场虚拟ccd的内方位元素模型,并依据成像时间建立其几何成像模型;针对感兴趣区域成像区域进行传感器校正,依据感兴趣区域地理范围,通过全视场虚拟ccd的几何成像模型反算得到感兴趣区域在全视场虚拟ccd的起始探元号,以全视场虚拟ccd的起始探元号对应的内方位参数作为动态虚拟ccd的内方位参数,建立传感器校正模型;在校正模型建立的基础上,通过原始影像和校正后影像的坐标映射关系即可重采样得到传感器校正影像,即获取到感兴趣区域传感器校正影像及其精确的rpc文件。
14.进一步地,根据所述感兴趣区域,在所述目标区域中的前视影像、后视影像上进行
相同感兴趣区域的预测包括:对于参考影像上的一个给定特征点ρ0,其物方空间的对应点位于通过点ρ0的摄影光线上,假设z0为点ρ0的概略高程值,通过共线方程式获得点的三维坐标ρ0(x0,y0,z0);假设给定概略高程值z0的容差为δz,得到对应于高程z0-δz和z0 δz的两个物方点ρmin和ρmax;将该两点通过有理函数模型投影到前视和后视影像上,每个影像上可以得到对应的像点坐标ρ'min(xmin,ymin)和ρ'max(xmax,ymax);利用影像的精确定向参数,将摄影光线段ρminρmax分别投影到搜索影像li上,以得到给定点ρ0在影像li上的同名核线ρ'minρ'max,点ρ0的匹配点位于搜索影像的li上的核线上。
15.本发明的有益效果如下:本发明提供的一种光学卫星遥感影像检测方法,通过获取光学卫星遥感影像,对光学卫星遥感影像中的阴影区进行提取,对阴影区进行阴影区重建处理,基于阴影区重建处理后的光学卫星遥感影像,构建比值图及多尺度细节图,对多尺度细节图进行二值化,区分出目标区域,在目标区域的下视影像中提取感兴趣区域,根据感兴趣区域,在目标区域中的前视影像、后视影像上进行相同感兴趣区域的预测,基于核线约束条件,对下视影像、前视影像、后视影像进行三幅影像的最小二乘匹配,根据匹配结果进行前方交会,得到数字地表模型,对遥感卫星影像数据的处理效率得到进一步提升。
附图说明
16.为了更清楚地说明本发明的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,对于本领域普通技术人员而言,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
17.图1为本发明实施例提供的一种光学卫星遥感影像检测方法的流程图;图2为本发明实施例提供的一种光学卫星遥感影像检测方法一实施例的流程图。
具体实施方式
18.为使本发明的目的、技术方案和优点更加清楚,下面将结合本发明具体实施例及相应的附图对本发明技术方案进行清楚、完整地描述。显然,所描述的实施例仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。以下结合附图,详细说明本发明各实施例提供的技术方案。
19.请参阅图1,本发明提供一种光学卫星遥感影像检测方法,包括:步骤s101,获取光学卫星遥感影像。
20.步骤s102,对所述光学卫星遥感影像中的阴影区进行提取。
21.光学卫星遥感影像中不可避免会出现阴影,这些阴影可能是建筑物、树木等对光线遮挡,导致遮挡区域的反射光强度减弱、光学传感器接收信号降低,而在相应位置的影像区内形成较暗灰度图像的结果。阴影的存在对后续的图像处理如图像分割、特征抽取和分类识别都带来了极大的困难,有必要对图像的阴影区域专门处理,高分辨率卫星遥感影像数据量大、内容复杂、各类细小地物数量多、干扰严重。
22.因此,在本实施例中,对所述光学卫星遥感影像中的阴影区进行提取,包括:步骤s201,建立原始图像的梯度图。
23.步骤s202,在梯度图中选择出点建立二值图。
24.其中,在梯度图中选择出梯度较小的点建立二值图,亮区对应小梯度。
25.步骤s203,对二值图每个亮区求图像平均灰度。
26.步骤s204,判断图像平均灰度是否大于预设阈值。
27.步骤s205,如果图像平均灰度大于预设阈值,去除二值图对应区域以及二值图中的小图斑,得到基本阴影区。
28.其中,基本阴影区只是较为均匀的阴影中间区, 还需将它扩展获得完整的阴影区。
29.步骤s206,将每一图斑用灰度形态学的方法向外膨胀,新增加的像素点是灰度值与附近阴影区平均灰度值变化小于预定范围的点,一直扩展到梯度及灰度变化大于预定范围的边沿部分结束,得到阴影区。
30.在本实施例中,对所述光学卫星遥感影像中的阴影区进行提取,还包括:对二值图中亮区部分求出梯度的分布,确定低梯度点占总数的百分比。判断低梯度点占总数的百分比是否高于预设阈值;如果所述百分比高于预设阈值,识别为水系,从阴影区去除。水系的特点是均质性很高,对应于二值图中每一个较大的亮区部分,求出梯度的分布,确定低梯度点占总数的百分比,若该值很高就认为是水系,从基本阴影区去除。
31.在基本阴影区形成时, 部分提取的建筑物区域中会包括阴影。对阴影区作灰度直方图分析,若在低灰度区及中灰度区有两个明显的峰值,根据直方图的谷值,去除高灰度的像素后得到的区域作为阴影区。获取基本阴影区的高梯度边界,对边界内每一像素点在太阳方位角的方向上作hough变换投影;针对累积点数较大的极值位置作线性检测,检测首尾部分是否有明显的长直线,或是检测区域中是否存在多个较长的平行线段;如果有明显的长直线或存在多个较长的平行线段,确定该区域边界与太阳方位角相关为阴影区,否则认为是其他特殊地物。将二值图上表现为白色区域中的黑色区域填充成白色,得到完整的阴影内部区域。在阴影区外沿建立边界区;读取边界区的梯度值;找出最大梯度的位置,在边界区内跟踪出一条最大梯度的封闭曲线为边界线;在边界线内部作填充,得到边界清晰的阴影区。
32.步骤s103,对所述阴影区进行阴影区重建处理。
33.步骤s104,基于阴影区重建处理后的光学卫星遥感影像,构建比值图及多尺度细节图。
34.步骤s105,对所述多尺度细节图进行二值化,区分出目标区域。
35.步骤s106,在所述目标区域的下视影像中提取感兴趣区域。
36.在本实施例中,在所述目标区域的下视影像中提取感兴趣区域,包括:建立目标区域的下视影像中当前成像行的严格成像模型;计算当前成像行首尾端点的地理坐标,得到点p0,q0;从t0时刻开始,每隔δt时间,重复上述步骤,对当前成像行首尾端点的地理坐标进行实时计算,在t1=t0 δt时刻得到点p1,q1;判断感兴趣区域中心点是否位于矩形(p0,q0,p1,q1)内,如果感兴趣区域中心点不位于矩形(p0,q0,p1,q1)内,则δt时间后继续重复上述计算;如果感兴趣区域中心点位于矩形(pi,qi,pi 1,qi 1)内,计算该点准确图像坐标和感兴趣区域范围。
37.感兴趣区域定位需要根据任务指令中指定的感兴趣区域中心的经纬度和尺寸,反
算整个感兴趣区域在原始影像上的覆盖范围,从而对该区域进行后续处理。高分辨率光学卫星通常采用时间延迟积分 ccd 作为成像器件,通过线阵推扫获取条带数据。由于每一行成像数据所对应的姿态和轨道数据不同,导致每一行影像的严密成像几何模型各不相同,通过经纬度坐标反算图像坐标需要迭代进行。
38.在本实施例中,计算该点准确图像坐标和感兴趣区域范围之后,所述方法还包括:获取相对辐射校正系数,建立相对辐射校正系数查找表;根据感兴趣区定位结果,获取感兴趣区域对应图像的探元成像范围;依据成像增益、级数信息,在相对辐射校正系数查找表中查找对应的相对辐射校正系数;根据下式计算校正后影像灰度;式中,为相对辐射校正后第i号探元的dn值,i为原始图像第i号探元的dn值,为第i号探元的偏移值,为第i号探元的归一化増益。
39.基于原始多片ccd建立覆盖整景影像范围的全视场虚拟ccd的内方位元素模型,并依据成像时间建立其几何成像模型;针对感兴趣区域成像区域进行传感器校正,依据感兴趣区域地理范围,通过全视场虚拟ccd的几何成像模型反算得到感兴趣区域在全视场虚拟ccd的起始探元号,以全视场虚拟ccd的起始探元号对应的内方位参数作为动态虚拟ccd的内方位参数,建立传感器校正模型;在校正模型建立的基础上,通过原始影像和校正后影像的坐标映射关系即可重采样得到传感器校正影像,即获取到感兴趣区域传感器校正影像及其精确的rpc文件。
40.步骤s107,根据所述感兴趣区域,在所述目标区域中的前视影像、后视影像上进行相同感兴趣区域的预测。
41.具体地,对于参考影像上的一个给定特征点ρ0,其物方空间的对应点位于通过点ρ0的摄影光线上,假设z0为点ρ0的概略高程值,通过共线方程式获得点的三维坐标ρ0(x0,y0,z0);假设给定概略高程值z0的容差为δz,得到对应于高程z0-δz和z0 δz的两个物方点ρmin和ρmax;将该两点通过有理函数模型投影到前视和后视影像上,每个影像上可以得到对应的像点坐标ρ'min(xmin,ymin)和ρ'max(xmax,ymax);利用影像的精确定向参数,将摄影光线段ρminρmax分别投影到搜索影像li上,以得到给定点ρ0在影像li上的同名核线ρ'minρ'max,点ρ0的匹配点位于搜索影像的li上的核线上。
42.步骤s108,基于核线约束条件,对所述下视影像、前视影像、后视影像进行三幅影像的最小二乘匹配。
43.步骤s109,根据所述匹配结果进行前方交会,得到数字地表模型。
44.本发明实施例还提供一种存储介质,本发明实施例还提供一种存储介质,所述存储介质中存储有计算机程序,所述计算机程序被处理器执行时实现本发明提供的光学卫星遥感影像检测方法的各实施例中的部分或全部步骤。所述的存储介质可为磁碟、光盘、只读存储记忆体(英文:read-onlymemory,简称:rom)或随机存储记忆体(英文:randomaccessmemory,简称:ram)等。
45.本领域的技术人员可以清楚地了解到本发明实施例中的技术可借助软件加必需的通用硬件平台的方式来实现。基于这样的理解,本发明实施例中的技术方案本质上或者
说对现有技术做出贡献的部分可以以软件产品的形式体现出来,该计算机软件产品可以存储在存储介质中,如rom/ram、磁碟、光盘等,包括若干指令用以使得一台计算机设备(可以是个人计算机,服务器,或者网络设备等)执行本发明各个实施例或者实施例的某些部分所述的方法。
46.以上所述的本发明实施方式并不构成对本发明保护范围的限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。