技术特征:
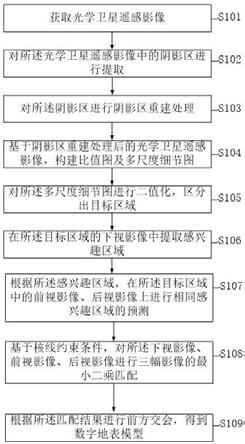
1.一种光学卫星遥感影像检测方法,其特征在于,包括:获取光学卫星遥感影像;对所述光学卫星遥感影像中的阴影区进行提取;对所述阴影区进行阴影区重建处理;基于阴影区重建处理后的光学卫星遥感影像,构建比值图及多尺度细节图;对所述多尺度细节图进行二值化,区分出目标区域;在所述目标区域的下视影像中提取感兴趣区域;根据所述感兴趣区域,在所述目标区域中的前视影像、后视影像上进行相同感兴趣区域的预测;基于核线约束条件,对所述下视影像、前视影像、后视影像进行三幅影像的最小二乘匹配;根据所述匹配结果进行前方交会,得到数字地表模型。2.如权利要求1所述的光学卫星遥感影像检测方法,其特征在于,对所述光学卫星遥感影像中的阴影区进行提取,包括:建立原始图像的梯度图;在梯度图中选择出点建立二值图;对二值图每个亮区求图像平均灰度;判断图像平均灰度是否大于预设阈值;如果图像平均灰度大于预设阈值,去除二值图对应区域以及二值图中的小图斑,得到基本阴影区;将每一图斑用灰度形态学的方法向外膨胀,新增加的像素点是灰度值与附近阴影区平均灰度值变化小于预定范围的点,一直扩展到梯度及灰度变化大于预定范围的边沿部分结束,得到阴影区。3.如权利要求2所述的光学卫星遥感影像检测方法,其特征在于,对所述光学卫星遥感影像中的阴影区进行提取,还包括:对二值图中亮区部分求出梯度的分布,确定低梯度点占总数的百分比;判断低梯度点占总数的百分比是否高于预设阈值;如果所述百分比高于预设阈值,识别为水系,从阴影区去除;对阴影区作灰度直方图分析,若在低灰度区及中灰度区有两个明显的峰值,根据直方图的谷值,去除高灰度的像素后得到的区域作为阴影区。4.如权利要求3所述的光学卫星遥感影像检测方法,其特征在于,对所述光学卫星遥感影像中的阴影区进行提取,还包括:获取基本阴影区的高梯度边界,对边界内每一像素点在太阳方位角的方向上作hough变换投影;针对累积点数较大的极值位置作线性检测,检测首尾部分是否有明显的长直线,或是检测区域中是否存在多个较长的平行线段;如果有明显的长直线或存在多个较长的平行线段,确定该区域边界与太阳方位角相关为阴影区,否则认为是其他特殊地物。5.如权利要求4所述的光学卫星遥感影像检测方法,其特征在于,对所述光学卫星遥感
影像中的阴影区进行提取,还包括:将二值图上表现为白色区域中的黑色区域填充成白色,得到完整的阴影内部区域。6.如权利要求5所述的光学卫星遥感影像检测方法,其特征在于,对所述光学卫星遥感影像中的阴影区进行提取,还包括:在阴影区外沿建立边界区;读取边界区的梯度值;找出最大梯度的位置,在边界区内跟踪出一条最大梯度的封闭曲线为边界线;在边界线内部作填充,得到边界清晰的阴影区。7.如权利要求1所述的光学卫星遥感影像检测方法,其特征在于,在所述目标区域的下视影像中提取感兴趣区域,包括:建立目标区域的下视影像中当前成像行的严格成像模型;计算当前成像行首尾端点的地理坐标,得到点p0,q0;从t0时刻开始,每隔δt时间,重复上述步骤,对当前成像行首尾端点的地理坐标进行实时计算,在t1=t0 δt时刻得到点p1,q1;判断感兴趣区域中心点是否位于矩形(p0,q0,p1,q1)内,如果感兴趣区域中心点不位于矩形(p0,q0,p1,q1)内,则δt时间后继续重复上述计算;如果感兴趣区域中心点位于矩形(pi,qi,pi 1,qi 1)内,计算该点准确图像坐标和感兴趣区域范围。8.如权利要求7所述的光学卫星遥感影像检测方法,其特征在于,计算该点准确图像坐标和感兴趣区域范围之后,所述方法还包括:获取相对辐射校正系数,建立相对辐射校正系数查找表;根据感兴趣区定位结果,获取感兴趣区域对应图像的探元成像范围;依据成像增益、级数信息,在相对辐射校正系数查找表中查找对应的相对辐射校正系数;根据下式计算校正后影像灰度;式中,为相对辐射校正后第i号探元的dn值,i为原始图像第i号探元的dn值,为第i号探元的偏移值,为第i号探元的归一化増益。9.如权利要求8所述的光学卫星遥感影像检测方法,其特征在于,计算校正后影像灰度之后,所述方法还包括:基于原始多片ccd建立覆盖整景影像范围的全视场虚拟ccd的内方位元素模型,并依据成像时间建立其几何成像模型;针对感兴趣区域成像区域进行传感器校正,依据感兴趣区域地理范围,通过全视场虚拟ccd的几何成像模型反算得到感兴趣区域在全视场虚拟ccd的起始探元号,以全视场虚拟ccd的起始探元号对应的内方位参数作为动态虚拟ccd的内方位参数,建立传感器校正模型;
在校正模型建立的基础上,通过原始影像和校正后影像的坐标映射关系即可重采样得到传感器校正影像,即获取到感兴趣区域传感器校正影像及其精确的rpc文件。10.如权利要求9所述的光学卫星遥感影像检测方法,其特征在于,根据所述感兴趣区域,在所述目标区域中的前视影像、后视影像上进行相同感兴趣区域的预测包括:对于参考影像上的一个给定特征点ρ0,其物方空间的对应点位于通过点ρ0的摄影光线上,假设z0为点ρ0的概略高程值,通过共线方程式获得点的三维坐标ρ0(x0,y0,z0);假设给定概略高程值z0的容差为δz,得到对应于高程z0-δz和z0 δz的两个物方点ρmin和ρmax;将该两点通过有理函数模型投影到前视和后视影像上,每个影像上可以得到对应的像点坐标ρ'min(xmin,ymin)和ρ'max(xmax,ymax);利用影像的精确定向参数,将摄影光线段ρminρmax分别投影到搜索影像li上,以得到给定点ρ0在影像li上的同名核线ρ'minρ'max,点ρ0的匹配点位于搜索影像的li上的核线上。
技术总结
本发明公开一种光学卫星遥感影像检测方法。本发明提供的一种光学卫星遥感影像检测方法,通过获取光学卫星遥感影像,对光学卫星遥感影像中的阴影区进行提取,对阴影区进行阴影区重建处理,基于阴影区重建处理后的光学卫星遥感影像,构建比值图及多尺度细节图,对多尺度细节图进行二值化,区分出目标区域,在目标区域的下视影像中提取感兴趣区域,根据感兴趣区域,在目标区域中的前视影像、后视影像上进行相同感兴趣区域的预测,基于核线约束条件,对下视影像、前视影像、后视影像进行三幅影像的最小二乘匹配,根据匹配结果进行前方交会,得到数字地表模型,对遥感卫星影像数据的处理效率得到进一步提升。效率得到进一步提升。效率得到进一步提升。
技术研发人员:秦静 祝青
受保护的技术使用者:西安中科西光航天科技有限公司
技术研发日:2022.03.11
技术公布日:2022/4/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。