1.本发明涉及锂电池检测技术领域,尤其涉及一种自动化锂电池检测用多工位拍摄检测装置。
背景技术:
2.锂电池在生产完毕后,还需要对锂电池是否有表面缺陷进行检测。在对锂电池进行检测时,需要将锂电池运送至不同工位从而对不同位置进行检测。目前在运输过程中是通过人工将锂电池直接放在皮带运输机上进行运输的,锂电池放置的位置有偏差,无法保证所有锂电池放置的位置相同,导致机械手再将锂电池拿到检测工位时,机械手与锂电池之间的相对位置无法一致,从而导致检测过程有时检测不到需要的结果和数据。并且现有的皮带运输机通常为直线式运输,占用空间较大,不利于检测空间的布置。
3.由于锂电池呈矩形,因此需要对锂电池的四个侧面以及正面和反面均进行表面检测。对锂电池的六个面进行拍摄取相然后利用计算机对相片进行表面缺陷分析也已逐步应用到现代化生产中。目前的取相拍摄装置通常只有一个摄像头,在同一个摄像头取相速度较慢,影响检测速度。并且目前的取相拍摄装置布局和构造不合理,占据空间大,光源照射不均匀,影响拍摄效果,使得结果不准确。
4.并且现有的拍摄检测装置不能对重点面进行复核,也不能从不同角度打光进行复核。
5.现有的拍摄检测装置自动化程度和一体化程度均不高,在整个检测过程中需要很多人工辅助。
技术实现要素:
6.为了克服上述技术的不足,本发明的目的是提供一种自动化锂电池检测用多工位拍摄检测装置。
7.本发明所采用的技术方案是:一种自动化锂电池检测用多工位拍摄检测装置,包括旋转装置、侧面取相拍摄装置、正面取相拍摄装置、反面取相拍摄装置和双向取相拍摄装置,侧面取相拍摄装置、正面取相拍摄装置、反面取相拍摄装置、双向取相拍摄装置沿旋转装置的旋转方向依次间隔设置,所述侧面取相拍摄装置的一侧设置有第一传递机械手,正面取相拍摄装置的一侧设置有第二传递机械手,反面取相拍摄装置的一侧设置有第三传递机械手,双向取相拍摄装置的一侧设置有第四传递机械手,正面取相拍摄装置的一侧设置有第一反转装置,反面取相拍摄装置的一侧设置有第二反转装置。
8.所述旋转装置包括第四主动轮、第四从动轮、第四电机和第四轴承,所述第四主动轮的轮轴与第四电机连接,所述第四从动轮的轮轴的一端安装在第四轴承内,第四主动轮与第四从动轮之间通过坦克链传动连接,所述坦克链上沿其传动方向依次间隔设置有多个电池放置机构。
9.所述电池放置机构包括第四竖向定位块,所述竖向定位块一侧的下部与坦克链固
定连接,竖向定位块另一侧的上部固定连接有两个水平定位块,两个水平定位块分别与竖向定位块的两端固定连接,两个水平定位块之间设置有连接块,连接块的两端分别与两个水平定位块固定连接,所述连接块的上方设置有第一限位块,第一限位块的两端分别与两个水平定位块垂直固定连接,所述水平定位块的两端分别固定安装有一个限位柱,同一个水平定位块上的两个限位柱之间设置有第二限位块,第二限位块与水平定位块固定连接,第一限位块、两个第二限位块和四个限位柱之间形成用于容纳锂电池的限位空间。
10.所述第一反转装置和第二反转装置大小结构相同,所述第一反转装置包括底部支架、立板、第四丝杠、第五电机、第四滑台、导向板、滑动套、反转板和旋转气缸,所述立板的下部与底部支架固定连接,立板的上部通过顶部连接板与导向板固定连接,立板与导向板间隔平行设置,第四丝杠设置在立板与导向板之间,第四丝杠、立板和导向板均竖直设置,所述第五电机与第四丝杠连接,第五电机带动第四丝杠转动,所述第四滑台滑动设置在第四丝杠上,所述滑动套套设在导向板上,所述滑动套的一侧与第四滑台固定连接,另一侧与旋转气缸的缸体固定连接,所述旋转气缸的旋转端与反转板连接,所述反转板上设置有两个真空吸盘,所述反转板设置在导向板的一侧。
11.所述反转板与导向板呈垂直设置。
12.所述第五电机固定安装在底部支架上。
13.所述侧面取相拍摄装置包括第一相机支架、第一相机、第一打光机构和第二打光机构,第一打光机构设置在第一相机支架与第二打光机构之间,所述第一相机支架包括两个间隔设置的第一立柱,每个第一立柱的下部均连接有第一底座,上部均连接有第一矩形支撑块,两个第一矩形支撑块通过第一横柱固定连接,第一横柱中部固定连接有第一相机安装底座,所述第一相机固定安装在第一相机安装底座上,所述第一打光机构包括第一立架、第一铝型材连接板、第一安装板、第一环形光源和两个第一上连接板,所述第一铝型材连接板的一端与第一立架垂直固定连接,另一端与第一安装板垂直固定连接,第一安装板的两端分别与两个第一上连接板垂直固定连接,所述第一环形光源的两端分别与两个第一上连接板固定连接,所述第二打光机构包括第二立架和第一条形光源,第一条形光源固定安装在第二立架的上部,所述第一条形光源设置在第一相机的一侧,所述第一环形光源设置在第一条形光源与第一相机之间,所述第一相机水平设置。
14.所述两个第一立柱呈平行设置。
15.所述第一立架下部固定连接有两个第一直角形防倾体。
16.所述第二立架下部固定连接有两个第二直角形防倾体。
17.所述正面取相拍摄装置包括第三立架、第二相机、第一相机支撑板、第三打光机构和第四打光机构,所述第二相机通过第一相机支撑板与第三立架固定连接,第二相机与第三打光机构相对设置,第四打光机构设置在第二相机的一侧,所述第三打光机构包括第一竖向支架,所述第一竖向支架上沿其竖直方向由上到下依次设置有第二条形光源和第三条形光源,第二条形光源设置在第二相机的上方,第三条形光源设置在第二相机的下方,所述第四打光机构包括第二竖向支架,所述第二竖向支架上沿其竖直方向由上到下依次设置有第四条形光源、第五条形光源和第六条形光源,第四条形光源和第五条形光源均设置在第二相机的上方,第六条形光源设置在第二相机的下方,所述第二相机竖直朝上设置。
18.所述反面取相拍摄装置包括第四立架、第三相机、第二相机支撑板、第五打光机构
和第六打光机构,所述第三相机通过第二相机支撑板与第四立架固定连接,所述第三相机与第五打光机构相对设置,第六打光机构设置在第三相机的一侧,所述第五打光机构包括第三竖向支架,第三竖向支架上部固定连接有第七条形光源,第七条形光源设置在第三相机上方,所述第六打光机构包括第四竖向支架,第四竖向支架上部固定连接有第八条形光源,第八条形光源设置在第三相机上方,所述第三相机竖直朝上设置。
19.所述双向取相拍摄装置包括第二相机支架、第四相机、第五相机、第七打光机构、第八打光机构、第六相机、第五立架和第三相机支撑板,所述第四相机和第五相机并排间隔设置,第四相机和第五相机均固定安装在第二相机支架上部,所述第六相机通过第三相机支撑板与第五立架固定连接,第七打光机构和第八打光机构设置在第六相机与第二相机支架之间,所述第七打光机构包括第六立架、第二环形光源和环形光源安装架,第二环形光源通过环形光源安装架与第六立架固定连接,第八打光机构包括第七立架和第九条形光源,第九条形光源与第七立架的上部固定连接,所述第二环形光源设置在第六相机上方,所述第九条形光源设置在第四相机和第五相机的下方,所述第四相机和第五相机水平设置,第六相机竖直朝上设置。
20.与现有技术相比,本发明具有以下有益效果:本发明所述的一种自动化锂电池检测用多工位拍摄检测装置,其旋转装置便于将锂电池运送至不同工位处,节省空间,方便检测空间的布置;通过对锂电池的放置位置进行限定,从而使得锂电池放置位置一致,便于机械手的取放,从而保证检测结果准确;通过设置反转装置,能快速将锂电池翻转180度,便于对锂电池进行正面和反面的检测,大大提升了生产效率,降低了生产成本;通过设置侧面取相拍摄装置、正面取相拍摄装置和反面取相拍摄装置,实现了在三个工位对锂电池的不同面进行拍摄取相,取相速度更快,效率更高,从而使得检测效率提高,对不同的面的拍摄选用不同角度和不同型号的光源,打光照射更加均匀,保证拍摄效果;通过设置双向取相拍摄装置,在不同光照的条件下,再次对侧面和反面取相,从而进一步确定电池表面的细节情况,在不同光照角度下,再次取得反面和侧面的照片,从而对反面和侧面进行复核,保证检测结果,由于侧面和反面更容易出现表面缺陷,因此进行二次复核;本发明布局和构造合理,占用空间小;本发明采用双上料的模式,适用性广,并且实现了上料、拍摄取相的一体化和自动化,生产和检测效率更高,降低了生产成本,大大节省人工;
附图说明
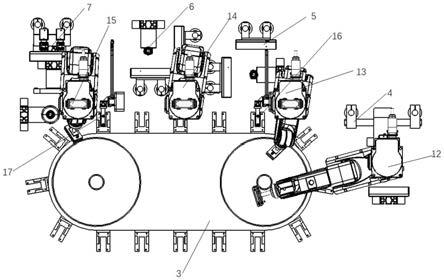
21.图1是本发明的俯视结构示意图;
22.图2是本发明的立体结构示意图;
23.图3是本发明的旋转装置的结构示意图;
24.图4是本发明的电池放置机构的结构示意图;
25.图5是本发明的侧面取相拍摄装置的结构示意图;
26.图6是本发明的正面取相拍摄装置的结构示意图;
27.图7是本发明的反面取相拍摄装置的结构示意图;
28.图8是本发明的双向取相拍摄装置的结构示意图;
29.图9是本发明的第一反转装置的结构示意图。
具体实施方式
30.下面结合附图和具体实施例对本发明作详细说明。
31.如图1至图2所示,一种自动化锂电池检测用多工位拍摄检测装置,包括旋转装置3、侧面取相拍摄装置4、正面取相拍摄装置5、反面取相拍摄装置6和双向取相拍摄装置7,侧面取相拍摄装置4、正面取相拍摄装置5、反面取相拍摄装置6、双向取相拍摄装置7沿旋转装置3的旋转方向依次间隔设置,所述侧面取相拍摄装置4的一侧设置有第一传递机械手12,正面取相拍摄装置5的一侧设置有第二传递机械手13,反面取相拍摄装置6的一侧设置有第三传递机械手14,双向取相拍摄装置7的一侧设置有第四传递机械手15,正面取相拍摄装置5的一侧设置有第一反转装置16,反面取相拍摄装置6的一侧设置有第二反转装置17。
32.如图3所示,所述旋转装置3包括第四主动轮301、第四从动轮302、第四电机303和第四轴承304,所述第四主动轮301的轮轴与第四电机303连接,所述第四从动轮302的轮轴的一端安装在第四轴承304内,第四主动轮301与第四从动轮302之间通过坦克链305传动连接,所述坦克链305上沿其传动方向依次间隔设置有多个电池放置机构306。
33.如图4所示,所述电池放置机构306包括第四竖向定位块3061,所述竖向定位块3061一侧的下部与坦克链305固定连接,竖向定位块3061另一侧的上部固定连接有两个水平定位块3062,两个水平定位块3062分别与竖向定位块3061的两端固定连接,两个水平定位块3062之间设置有连接块3063,连接块3063的两端分别与两个水平定位块3062固定连接,所述连接块3063的上方设置有第一限位块3064,第一限位块3064的两端分别与两个水平定位块3062垂直固定连接,所述水平定位块3062的两端分别固定安装有一个限位柱3065,同一个水平定位块3062上的两个限位柱3065之间设置有第二限位块3066,第二限位块3066与水平定位块3062固定连接,第一限位块3064、两个第二限位块3066和四个限位柱3065之间形成用于容纳锂电池的限位空间。
34.旋转装置便于将锂电池运送至侧面取相拍摄装置4、正面取相拍摄装置5、反面取相拍摄装置6和双向取相拍摄装置7等不同工位,节省空间,方便检测空间的布置;通过对锂电池的放置位置进行限定,从而使得锂电池放置位置一致,便于第一传递机械手对锂电池进行取放,保证后续拍摄完整,保证拍摄效果,从而保证检测结果准确。
35.所述第一反转装置16和第二反转装置17大小结构相同。如图9所示,所述第一反转装置16包括底部支架1601、立板1602、第四丝杠1603、第五电机1604、第四滑台1605、导向板1606、滑动套1607、反转板1608和旋转气缸1609,所述立板1602的下部与底部支架1601固定连接,立板1602的上部通过顶部连接板16011与导向板1606固定连接,立板1602与导向板1606间隔平行设置,第四丝杠1603设置在立板1602与导向板1606之间,第四丝杠1603、立板1602和导向板1606均竖直设置,所述第五电机1604与第四丝杠1603连接,第五电机1604带动第四丝杠1603转动,所述第四滑台1605滑动设置在第四丝杠1603上,所述滑动套1607套设在导向板1606上,所述滑动套1607的一侧与第四滑台1605固定连接,另一侧与旋转气缸1609的缸体固定连接,所述旋转气缸1609的旋转端与反转板1608连接,所述反转板1608上设置有两个真空吸盘16010,所述反转板1608设置在导向板1606的一侧。
36.所述反转板1608与导向板1606呈垂直设置。
37.所述第五电机1604固定安装在底部支架1601上。
38.旋转装置在运行过程中,每个电池放置机构306均会依次经过第一反转装置16,当
第一反转装置16的反转板1608位于电池放置机构306的两个水平定位块3062之间的下部时,第四滑台1605向上移动,从而使得真空吸盘16010向上移动,直至真空吸盘16010吸附住锂电池,然后旋转气缸1609带动反转板1608翻转180度,从而使得锂电池翻面,且第一反转装置16将翻面后的锂电池再放回电池放置机构306上。翻面后,第四滑台1605向下移动。所述两个真空吸盘16010均通过管道与真空发生器连接,真空发生器启动或关闭,使得真空吸盘16010实现吸附或解吸。
39.同理,当电池放置机构306再经过第二反转装置17时,锂电池再次被翻面。
40.如图5所示,所述侧面取相拍摄装置4包括第一相机支架401、第一相机402、第一打光机构403和第二打光机构404,第一打光机构403设置在第一相机支架401与第二打光机构404之间,所述第一相机支架401包括两个间隔设置的第一立柱4011,每个第一立柱4011的下部均连接有第一底座4012,上部均连接有第一矩形支撑块4013,两个第一矩形支撑块4013通过第一横柱4014固定连接,第一横柱4014中部固定连接有第一相机安装底座4015,所述第一相机402固定安装在第一相机安装底座4015上,所述第一打光机构403包括第一立架4031、第一铝型材连接板4032、第一安装板4033、第一环形光源4034和两个第一上连接板4035,所述第一铝型材连接板4032的一端与第一立架4031垂直固定连接,另一端与第一安装板4033垂直固定连接,第一安装板4033的两端分别与两个第一上连接板4035垂直固定连接,所述第一环形光源4034的两端分别与两个第一上连接板4035固定连接,所述第二打光机构404包括第二立架4041和第一条形光源4042,第一条形光源4042固定安装在第二立架4041的上部,所述第一条形光源4042设置在第一相机402的一侧,所述第一环形光源4034设置在第一条形光源4042与第一相机402之间,所述第一相机402水平设置。
41.所述两个第一立柱4011呈平行设置。
42.所述第一立架4031下部固定连接有两个第一直角形防倾体4036。
43.所述第二立架4041下部固定连接有两个第二直角形防倾体4043。
44.第一传递机械手将锂电池从旋转装置上取下,然后将锂电池侧面放在第一相机镜头前,第一条形光源和第一环形光源照射的灯光均会照射在锂电池上,然后第一相机进行拍摄,对锂电池侧面进行取相。然后将照片传给远程计算机,远程计算机内通过视觉识别分析系统对照片进行识别,以确定侧面是否存在缺陷。第一传递机械手可以带动锂电池在同一水平面内转动,从而使锂电池的四个侧面依次被拍摄取相。第一传递机械手是采用吸盘吸附住锂电池正面,然后将锂电池移动到第一相机镜头前。
45.侧面取相拍摄装置4布局和构造合理,占用空间小,通过环形光源和条形光源同时对锂电池打光,打光照射更加均匀,保证拍摄效果。
46.如图6所示,所述正面取相拍摄装置5包括第三立架501、第二相机502、第一相机支撑板503、第三打光机构504和第四打光机构505,所述第二相机502通过第一相机支撑板503与第三立架501固定连接,第二相机502与第三打光机构504相对设置,第四打光机构505设置在第二相机502的一侧,所述第三打光机构504包括第一竖向支架5041,所述第一竖向支架5041上沿其竖直方向由上到下依次设置有第二条形光源5042和第三条形光源5043,第二条形光源5042设置在第二相机502的上方,第三条形光源5043设置在第二相机502的下方,所述第四打光机构505包括第二竖向支架5051,所述第二竖向支架5051上沿其竖直方向由上到下依次设置有第四条形光源5052、第五条形光源5053和第六条形光源5054,第四条形
光源5052和第五条形光源5053均设置在第二相机502的上方,第六条形光源5054设置在第二相机502的下方,所述第二相机502竖直朝上设置。
47.锂电池在侧面取相完毕后,第一传递机械手将其放回旋转装置,锂电池继续在旋转装置上移动,经过第一反转装置16时,锂电池被翻面,即使锂电池反面朝上。然后由第二传递机械手13从旋转装置上取下,第二传递机械手13吸附锂电池反面,再放置于第二相机502的上方,从而对锂电池的正面进行拍摄取相。正面取相完毕后,取得的照片传给远程计算机,远程计算机内通过视觉识别分析系统对照片进行识别,以确定正面是否存在缺陷。
48.如图7所示,所述反面取相拍摄装置6包括第四立架601、第三相机602、第二相机支撑板603、第五打光机构604和第六打光机构605,所述第三相机602通过第二相机支撑板603与第四立架601固定连接,所述第三相机602与第五打光机构604相对设置,第六打光机构605设置在第三相机602的一侧,所述第五打光机构604包括第三竖向支架6041,第三竖向支架6041上部固定连接有第七条形光源6042,第七条形光源6042设置在第三相机602上方,所述第六打光机构605包括第四竖向支架6051,第四竖向支架6051上部固定连接有第八条形光源6052,第八条形光源6052设置在第三相机602上方,所述第三相机602竖直朝上设置。
49.锂电池在正面取相完毕后,第二传递机械手13将锂电池再放回旋转装置。锂电池继续在旋转装置上移动,经过第二反转装置17时,锂电池再次被翻面,即使锂电池正面朝上。然后由第三传递机械手14将其从旋转装置上取下,第三传递机械手14吸附锂电池正面,再放置于第三相机602的上方,从而对锂电池的反面进行拍摄取相。反面取相完毕后,第三传递机械手14将锂电池再放回旋转装置。取得的照片传给远程计算机,远程计算机内通过视觉识别分析系统对照片进行识别,以确定反面是否存在缺陷。
50.如图8所示,所述双向取相拍摄装置7包括第二相机支架701、第四相机702、第五相机703、第七打光机构704、第八打光机构705、第六相机706、第五立架707和第三相机支撑板708,所述第四相机702和第五相机703并排间隔设置,第四相机702和第五相机703均固定安装在第二相机支架701上部,所述第六相机706通过第三相机支撑板7010与第五立架707固定连接,第七打光机构704和第八打光机构705设置在第六相机706与第二相机支架701之间,所述第七打光机构704包括第六立架7041、第二环形光源7042和环形光源安装架7043,第二环形光源7042通过环形光源安装架7043与第六立架7041固定连接,第八打光机构705包括第七立架7051和第九条形光源7052,第九条形光源7052与第七立架7051的上部固定连接,所述第二环形光源7042设置在第六相机706上方,所述第九条形光源7052设置在第四相机702和第五相机703的下方,所述第四相机702和第五相机703水平设置,第六相机706竖直朝上设置。
51.反面取相完毕后,锂电池由第三传递机械手14将其放回旋转装置。然后由第四传递机械手15将其从旋转装置上取下,先放在第六相机706上方取相,然后再放在第四相机702和第五相机703前方取相。在不同光照的条件下,再次对侧面和反面取相,从而进一步确定电池表面的细节情况。取得的照片传给远程计算机,远程计算机内通过视觉识别分析系统对照片进行识别,以确定反面和侧面是否存在缺陷。在不同光照角度下,再次取得反面和侧面的照片,从而对反面和侧面进行复核,保证检测结果。由于侧面和反面更容易出现表面缺陷,因此进行二次复核。
52.上述实施例以本发明技术方案为前提,给出了详细的实施方式和具体的操作过
程,但本发明的保护范围不限于上述的实施例。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。