1.本技术涉及电子技术领域,尤其涉及一种防抖模组及用户设备。
背景技术:
2.用户无论是在运动过程中,还是在非运动过程中进行拍摄时,常常容易出现因手抖而导致拍摄的图像或视频存在抖动模糊的问题。为了解决这一问题,出现了光学稳像(optical image stabilization,ois)技术,该技术是一种通过陀螺仪做电子设备(例如:手机、平板电脑等)抖动检测,然后通过ois马达反方向移动镜头来补偿手抖导致的光线在图像传感器上的偏移量,从而有效地克服因手抖而导致拍摄的图像或视频存在抖动模糊的问题。目前,ois技术中所采用的ois马达一般为音圈(vcm)马达和形状记忆合金(sma)马达。但,vcm马达因其特有的悬丝结构和驱动力小等缺陷导致无法实现大角度的ois旋转防抖;而sma马达则是受限于sma材料本身的可恢复应变量,导致无法实大角度的ois旋转防抖。
技术实现要素:
3.有鉴于此,有必要提供一种防抖模组及用户设备,以解决现有技术中防抖模组以及搭载防抖模组的用户设备存在的防抖角度小的问题。
4.本技术实施例的第一方面,提供了一种防抖模组,包括:
5.可移动元件,包括底面;
6.支撑结构,用于支撑所述可移动元件,所述支撑结构围设形成容置空间;以及
7.驱动组件,收容于所述容置空间,并位于所述可移动元件的底面一侧,所述驱动组件包括多根驱动线,每一所述驱动线的一端连接所述底面,另一端连接所述支撑结构,以驱动所述可移动元件相对所述支撑结构运动。其中,将所述驱动组件设置于所述可移动元件的底面一侧,可以大大减小各驱动线至可移动元件的中心轴的距离,从而减小大角度防抖时驱动线的收缩率或伸长率,进而实现大角度防抖。
8.第一方面的一种可能的实施方式中,所述多根驱动线交叉布置,且各根所述驱动线之间相互间隔设置。由此,可避免所述可移动元件相对所述支撑结构运动时各根驱动线之间的相互干扰。
9.第一方面的一种可能的实施方式中,所述驱动线的数量为四根,四根所述驱动线呈井字形排布。由此,借助不同驱动线的出力方式,实现了可移动元件相对于所述支撑结构的多轴向的防抖运动。
10.第一方面的一种可能的实施方式中,所述驱动线的数量为六根,其中四根所述驱动线呈井字形排布,其余两根所述驱动线与呈井字形排布的四根所述驱动线中的其中两根平行设置。由此,同一方位上布置的两根驱动线可择一、协同或交替工作,以提升所述防抖模组的使用寿命。
11.第一方面的一种可能的实施方式中,所述驱动线的数量为八根,其中四根所述驱动线呈井字形排布,其余四根所述驱动线与呈井字形排布的四根所述驱动线一一对应平行
设置。由此,同一方位上布置的两根驱动线可择一、协同或交替工作,以提升所述防抖模组的使用寿命。
12.第一方面的一种可能的实施方式中,呈井字形排布的四根所述驱动线分别为第一驱动线、第二驱动线、第三驱动线和第四驱动线,所述第一驱动线和所述第二驱动线平行设置,所述第一驱动线的一端连接所述底面,另一端连接所述支撑结构;与所述第一驱动线的一端朝向相同的所述第二驱动线的一端连接所述支撑结构,所述第二驱动线的另一端连接所述底面;所述第三驱动线和所述第四驱动线平行设置,所述第三驱动线的一端连接所述底面,另一端连接所述支撑结构;与所述第三驱动线的一端朝向相同的所述第四驱动线的一端连接所述支撑结构,所述第四驱动线的另一端连接所述底面,其中,所述第一驱动线和所述第二驱动线分别与所述第三驱动线和所述第四驱动线交叉布置。由此,借助不同驱动线的出力方式,实现了可移动元件相对于所述支撑结构的多轴向的防抖运动。
13.第一方面的一种可能的实施方式中,所述防抖模组还包括转动组件,所述转动组件包括基座及连接部,所述连接部的一端固定于所述底面,另一端可转动地连接于所述基座。由此,所述转动组件为所述驱动组件提供稳定的旋转轴心。
14.第一方面的一种可能的实施方式中,所述基座包括朝向所述底面的顶面,所述顶面设有凹槽,所述转动组件还包括盖板,所述盖板连接所述顶面,所述连接部活动收容于所述凹槽,且所述连接部的一端穿过所述盖板以与所述底面固定连接。由此,借助所述盖板的设置可以有效防止连接部脱离基座。
15.第一方面的一种可能的实施方式中,所述凹槽包括槽底面及围设于所述槽底面周缘的槽侧面,所述槽底面包括弧面及连接于所述弧面和所述槽侧面之间的平面,所述弧面相对所述平面内凹,所述连接部包括与所述弧面配合的配合面,所述配合面活动抵持于所述弧面,以使得所述连接部可转动地连接于所述基座。由此,借助所述基座和所述连接部的配合,实现了所述连接部与所述基座的可转动连接。
16.第一方面的一种可能的实施方式中,所述支撑结构包括底座及多个支撑件,所述底座呈环状结构,以围设形成所述容置空间,每一所述支撑件的一端设置于所述底座,另一端设置于所述可移动元件。由此,借助所述支撑件和所述底座的配合,实现了对所述可移动元件的稳定支撑。
17.第一方面的一种可能的实施方式中,所述底座包括两相对设置的第一侧壁和第二侧壁及两相对设置的第三侧壁和第四侧壁,所述第三侧壁和所述第四侧壁连接于所述第一侧壁和所述第二侧壁之间,以围设形成所述容置空间,呈井字形排布的四根所述驱动线包括第一驱动线、第二驱动线、第三驱动线和第四驱动线,其中,所述第一驱动线的一端连接所述第二侧壁,另一端连接所述底面的邻近所述第四侧壁的边缘区域;所述第二驱动线的一端连接所述第一侧壁,另一端连接所述底面的邻近所述第三侧壁的边缘区域;所述第三驱动线的一端连接所述第二侧壁,另一端连接所述底面的邻近第三侧壁的边缘区域;所述第四驱动线的一端连接所述第一侧壁,另一端连接所述底面的邻近所述第四侧壁的边缘区域。由此,借助不同驱动线的出力方式,实现了可移动元件相对于所述支撑结构的多轴向的防抖运动。
18.第一方面的一种可能的实施方式中,每一所述驱动线的两端分别设置有夹线部,所述夹线部用于夹持所述驱动线的两端,其中,所述支撑件电连接所述夹线部。由此,借助
所述夹线部加强了驱动线与所述支撑件和所述可移动元件的固定连接。
19.第一方面的一种可能的实施方式中,所述防抖模组还包括电路板,所述电路板设置于所述支撑结构背对所述可移动元件的表面,所述电路板电连接所述驱动组件。由此,通过所述电路板实现了对所述驱动组件的控制。
20.第一方面的一种可能的实施方式中,所述防抖模组还包括壳体,所述壳体包括上壳体及底板,所述上壳体连接所述底板以形成收容空间,所述可移动元件、所述支撑结构、所述驱动组件及所述电路板收容于所述收容空间,其中,所述支撑结构设置于所述底板,所述电路板设置于所述支撑结构和所述底板之间。由此,借助所述壳体有效保护收容空间内的所述可移动元件、所述支撑结构、所述驱动组件及所述电路板。
21.第一方面的一种可能的实施方式中,所述驱动线为形状记忆合金线。由此,所述驱动线借助其所使用的形状记忆合金材料的自身特性,实现了对所述可移动元件的驱动。
22.本技术实施例的第二方面,提供了一种用户设备,包括如前述所述的防抖模组。本技术实施例提供的用户设备具有与前述实施例提供的防抖模组相同的技术效果,此处不再赘述。
23.第二方面的一种可能的实施方式中,所述用户设备还包括控制器,所述控制器与所述驱动组件电性连接,用于控制所述驱动组件中的一根或多根驱动线工作。由此,借助所述控制器控制对应的驱动线进行工作,以适应可移动元件不同轴向防抖的需求。
附图说明
24.图1是本技术一实施方式的防抖模组的结构示意图。
25.图2为图1所示防抖模组的结构分解示意图。
26.图3为图2所示底座的结构示意图
27.图4为本技术一实施方式的驱动组件的布局示意图。
28.图5为本技术另一实施方式的驱动组件的布局示意图。
29.图6为本技术又一实施方式的驱动组件的布局示意图。
30.图7为本技术另一实施方式的防抖模组的结构示意图。
31.图8为图7所示转动组件的结构分解示意图。
32.图9为图7所示转动组件的剖视图。
33.图10为本技术另一实施例的防抖模组的结构示意图。
34.图11为图10所示防抖模组在另一视角下的结构示意图。
35.图12为为本技术另一实施例的防抖模组的结构示意图。
36.图13为图12所示防抖模组的结构分解示意图。
37.图14为本技术一实施例的用户设备的模块示意图。
38.图15为本技术一实施例的用户设备的结构示意图。
39.主要元件符号说明
40.防抖模组
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ141.支撑结构
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
10
42.容置空间
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
101
43.支撑件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
11
44.支撑部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
111
45.第一固定部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
112
46.第二固定部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
113
47.底座
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
12
48.第一侧壁
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
121
49.第一安装槽
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1211
50.第一内表面
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1212
51.第一外表面
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1213
52.第一上表面
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1214
53.第一下表面
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1215
54.第二侧壁
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
122
55.第二安装槽
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1221
56.第二内表面
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1222
57.第二外表面
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1223
58.第二上表面
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1224
59.第二下表面
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1225
60.第三侧壁
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
123
61.第四侧壁
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
124
62.凸柱
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
125
63.可移动元件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
20
64.底面
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
201
65.固定板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
202
66.第一固定板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
203
67.第二固定板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
204
68.柔性电路板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
21
69.驱动组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
30
70.夹线部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
301
71.第一夹线分部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
3011
72.第二夹线分部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
3012
73.第一驱动线
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀa74.第二驱动线
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀb75.第三驱动线
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀc76.第四驱动线
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀd77.第五驱动线
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀe78.第六驱动线
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀf79.第七驱动线
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀg80.第八驱动线
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀh81.转动组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
40
82.基座
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
41
83.顶面
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
411
84.凹槽
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
412
85.槽底面
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
4121
86.槽侧面
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
4122
87.弧面
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
4123
88.平面
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
4124
89.连接部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
42
90.第一连接分部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
421
91.配合面
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
4211
92.连接面
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
4212
93.第二连接分部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
422
94.盖板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
43
95.通孔
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
431
96.顶板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
432
97.电路板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
50
98.穿孔
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
501
99.壳体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
60
100.上壳体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
61
101.入光孔
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
611
102.开口
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
612
103.底板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
62
104.收容空间
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
63
105.用户设备
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ2106.检测器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ3107.外壳
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ4108.镜头孔
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
401
109.控制器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ5110.如下具体实施方式将结合上述附图进一步说明本技术。
具体实施方式
111.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
112.除非另有定义,本文所使用的所有的技术和科学术语与属于本技术的技术领域的技术人员通常理解的含义相同。本文中在本技术的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本技术。
113.以下,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”等的特征可以明示
或者隐含地包括一个或者更多个该特征。在本技术的描述中,除非另有说明,“多个”的含义是两个或两个以上。“上”、“下”等方位术语是相对于附图中的部件示意置放的方位来定义的,应当理解到,这些方向性术语是相对的概念,它们用于相对于的描述和澄清,其可以根据附图中部件所放置的方位的变化而相应地发生变化。
114.在本技术中,除非另有明确的规定和限定,术语“连接”应做广义理解,例如,“连接”可以是固定连接,也可以是可拆卸连接,或成一体;可以是直接相连,也可以通过中间媒介间接相连。
115.在下述实施例结合示意图进行详细描述时,为便于说明,表示器件局部结构的图会不依一般比例作局部放大,而且所述示意图只是示例,其在此不应限制本技术保护的范围。
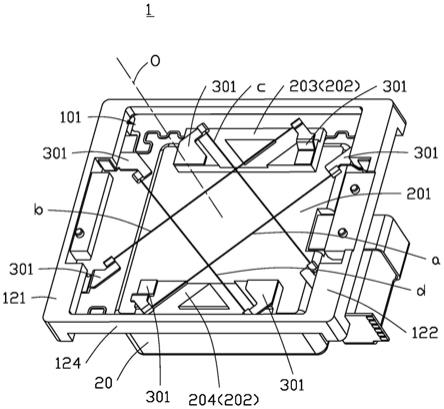
116.图1为本技术实施例提供的一种防抖模组的结构示意图,图2为图1所示防抖模组的结构分解示意图。如图1和图2所示,本技术实施例提供的防抖模组1包括:支撑结构10、可移动元件20以及驱动组件30。
117.所述支撑结构10用于支撑所述可移动元件20。所述支撑结构10围设形成容置空间101。在图示所示的实施例中,所述支撑结构10包括支撑件11及底座12。所述支撑件11连接于所述底座12和所述可移动元件20之间,用于支撑所述可移动元件20。
118.在本实施例中,所述支撑件11包括支撑部111及分别设置于所述支撑部111两端的第一固定部112和第二固定部113。所述支撑部111通过所述第一固定部112固定连接于所述底座12,通过所述第二固定部113固定连接于所述可移动元件20。其中,所述支撑部111、所述第一固定部112和所述第二固定部113一体成型。在其他实施方式中,所述支撑部111与所述第一固定部112和所述第二固定部113不限于通过焊接等方式连接为一体。
119.请参图2,为所述支撑部111的示例性结构。所述支撑部111可为经多次弯折的金属棒。其中,所述支撑部111大致呈波浪状。可以理解,所述支撑部111的形状不限,只要使得所述支撑件11能够支撑起所述可移动元件20即可。
120.请参图2,为所述第一固定部112和所述第二固定部113的示例性结构。第一固定部112和所述第二固定部113均呈片状。第一固定部112不限于通过焊接、借助固定件(例如:钉子)等方式固定于所述底座12,所述第二固定部113不限于通过焊接、借助固定件(例如:钉子)等方式固定于所述可移动元件20。可以理解,所述第一固定部112和所述第二固定部113不限于呈片状,也可以呈块状等,在此不作限定。
121.在一些实施例中,所述支撑件11还可电连接所述驱动组件30,以作为所述驱动组件30的通电回路的一部分,起到电连接的作用。
122.所述底座12呈环状结构,以围设形成所述容置空间101。如图2所示的实施例,所述底座12呈矩形环状结构。所述底座12包括两相对设置的第一侧壁121和第二侧壁122及两相对设置的第三侧壁123和第四侧壁124。所述第三侧壁123和所述第四侧壁124连接于所述第一侧壁121和所述第二侧壁122之间,以围设形成所述容置空间101。
123.参图1和图2,在本实施例中,所述支撑结构10包括四个所述支撑件11。其中,每一所述支撑件11中的第一固定部112固定于第一侧壁121和第三侧壁123的相交区域、第一侧壁121和第四侧壁124的相交区域、第二侧壁122和第三侧壁123的相交区域及第二侧壁122和第四侧壁124的相交区域中的其中之一;每一所述支撑件11中的第二固定部113连接所述
可移动元件20。如此,通过四个所述支撑件11共同实现了对所述可移动元件20的支撑。在其他实施方式中,所述支撑件11的数量及所设置的位置不限,只要能够支撑起所述可移动元件20即可。
124.参图2,在进一步的实施例中,第一侧壁121和第三侧壁123的相交区域、第一侧壁121和第四侧壁124的相交区域、第二侧壁122和第三侧壁123的相交区域及第二侧壁122和第四侧壁124的相交区域上均凸设有凸柱125。所述凸柱125的设置用于辅助所述支撑件11中的第一固定部112的固定。在其他实施例中,所述凸柱125可省略。
125.其中,所述凸柱125与所述第一侧壁121、所述第二侧壁122、所述第三侧壁123和所述第四侧壁124一体成型。在其他实施例中,所述凸柱125不限于通过焊接、粘接等方式固定于所述底座12。
126.在另一些实施例中,所述底座12的形状不限于呈矩形环状结构,还可以呈圆环结构、菱形环状结构等规则环状结构或其他不规则环状结构。
127.所述可移动元件20不限于是摄像模组、镜头、镜筒、透镜单元、或者是用于固定摄像模组、镜头、镜筒、透镜单元等的固定元件,在此不作任何限制。
128.如图2所示的实施例,所述可移动元件20上还设置有柔性电路板21。所述柔性电路板21作为外接端子使用。在其他可替代或进一步的实施例中,所述可移动元件20上可设置端子线等。
129.所述可移动元件20包括底面201。所述驱动组件30收容于所述容置空间101,并位于所述可移动元件20的底面201一侧。所述驱动组件30连接所述可移动元件20的底面201和所述支撑结构10的底座12,用于驱动所述可移动元件20相对所述底座12运动。在图1和图2所示的实施例中,所述底面201上设置有两固定板202。其中,所述支撑件11中的第二固定部113连接于所述固定板202朝向所述底面201的表面。所述驱动组件30连接所述固定板202背对所述底面201的表面和所述底座12。
130.在本实施例中,参图1和图2,两所述固定板202相对且间隔设置于所述底面201。其中一固定板202朝与其相邻的第三侧壁123延伸,以相对所述可移动元件20凸出;另一固定板202朝与其相邻的第四侧壁124延伸,以相对所述可移动元件20凸出。其中,所述支撑件11中的第二固定部113连接相对所述可移动元件20凸出部分的固定板202。
131.其中,所述固定板202与所述底座12相互间隔设置,以避免所述固定板202相对所述底座12运动时发生碰撞而影响所述可移动元件20的运动。
132.在一些实施例中,所述底面201上可仅设置一所述固定板202。如此,其中两所述支撑件11中的第二固定部113连接所述固定板202,另外两所述支撑件11中的第二固定部113连接所述底面201。
133.在另一些实施例中,所述底面201上可仅设置一固定板202。其中,所述固定板202的两端分别朝所述第三侧壁123和所述第四侧壁124延伸,以相对所述可移动元件20凸出。如此,所述支撑件11中的第二固定部113连接相对所述可移动元件20凸出部分的固定板202。
134.在其他一些实施例中,两所述固定板202均可省略。如此,每一所述支撑件11中的第二固定部113连接所述可移动元件20的底面201。
135.所述驱动组件30包括多根驱动线。每一驱动线连接于所述固定板202和所述底座
12之间,用于驱动所述可移动元件20相对所述底座12运动。其中,所述多根驱动线交叉布置,且各根所述驱动线之间相互间隔设置,以避免所述可移动元件20相对所述支撑结构10运动时各根驱动线的相互干扰。如图1和图2所示的实施例,每一驱动线的两端分别设置有夹线部301。所述夹线部301用于夹持所述驱动线的两端,并辅助所述驱动线固定于所述底座12和所述固定板202之间。其中,连接所述驱动线其中一端的夹线部301固定于所述底座12,连接所述驱动线另一端的夹线部301固定于所述固定板202背对所述底面201的表面。所述支撑件11电连接所述夹线部301。
136.在进一步的实施例中,固定于所述第一侧壁121和所述第二侧壁122上的夹线部301大致呈l状,以加强夹线部301与所述第一侧壁121和所述第二侧壁122的连接。在如图2所示的实施例中,固定于所述第一侧壁121和所述第二侧壁122上的夹线部301包括第一夹线分部3011及第二夹线分部3012。其中,第一夹线分部3011及第二夹线分部3012一体成型。
137.图3为图2所示底座的结构示意图。如图3所示的实施例中,所述第一侧壁121上开设有两间隔设置的第一安装槽1211,所述第二侧壁122上开设有与两所述第一安装槽1211对应的第二安装槽1221。其中,所述第一安装槽1211及第二安装槽1221的设置,用于配合连接所述第一侧壁121和所述第二侧壁122上的夹线部301的固定。
138.所述第一侧壁121包括朝向所述第二侧壁122的第一内表面1212、背对所述第二侧壁122的第一外表面1213及两背对设置的第一上表面1214及第一下表面1215。所述第一上表面1214和所述第一下表面1215连接于所述第一内表面1212和所述第二外表面1223之间。每一所述第一安装槽1211由所述第一内表面1212向所述第一外表面1213方向凹陷,且贯穿所述第一上表面1214及所述第一下表面1215。其中,如图2和图3所示,固定于所述第一侧壁121的夹线部301的第一夹线分部3011连接于所述第一上表面1214,第二夹线分部3012连接于所述第一安装槽1211内。
139.参图2和图3,所述第二侧壁122包括朝向所述第一侧壁121的第二内表面1222、背对所述第一侧壁121的第二外表面1223及两背对设置的第二上表面1224及第二下表面1225。所述第二上表面1224和所述第二下表面1225连接于所述第二内表面1222和所述第二外表面1223之间。每一所述第二安装槽1221由所述第二内表面1222向所述第二外表面1223方向凹陷,且贯穿所述第二上表面1224及所述第二下表面1225。其中,固定于所述第二侧壁122的夹线部301的第二夹线分部3012连接于所述第二上表面1224,第二夹线分部3012连接于所述第二安装槽1221内。
140.在另一些实施例中,每一所述第一安装槽1211由所述第一内表面1212向所述第一外表面1213方向凹陷,且仅贯穿所述第一上表面1214;每一所述第二安装槽1221由所述第二内表面1222向所述第二外表面1223方向凹陷,且仅贯穿所述第二上表面1224。
141.在其他一些实施例中,所述第一安装槽1211和所述第二安装槽1221可省略。
142.在一些实施例中,驱动线的两端可不设置所述夹线部301,如此,所述驱动线的两端分别通过不限于焊接等方式固定于所述底座12和所述固定板202背对所述底面201的表面。
143.可以理解,在一些实施例中,所述驱动线可为形状记忆合金(shape memory alloy,sma)材料制成,因而称为sma线。其中,当sma线因通电流或加热而升温时会收缩而发生形变;而当sma线不通电流或不加热而冷却时可恢复至形变前的原始状态,如此借以所述
驱动组件30实现了对所述可移动元件20的驱动。
144.可以理解,在另一些实施例中,所述驱动线可为其它因通电流或加热而升温时会收缩而发生形变的材料制成的线。所述驱动线不通电流或不加热而冷却时可恢复至形变前的原始状态,如此借以所述驱动组件30实现了对所述可移动元件20的驱动。
145.如图1所示的实施例,所述驱动组件30包括四根所述驱动线。四根所述驱动线呈井字形排布。
146.为方便描述,将上述四根驱动线分别以第一驱动线a、第二驱动线b、第三驱动线c及第四驱动线d表示,并将上述两所述固定板202分别以第一固定板203及第二固定板204表示。所述第一固定板203相对所述第二固定板204靠近所述第三侧壁123,所述第二固定板204相对所述第一固定板203靠近所述第四侧壁124。
147.在本实施方式中,所述第一驱动线a和所述第二驱动线b平行设置,所述第三驱动线c和所述第四驱动线d平行设置。所述第一驱动线a和所述第二驱动线b分别与所述第三驱动线c和所述第四驱动线d交叉布置,如此以呈现井字形排布。
148.其中,连接第一驱动线a一端的夹线部301固定于第二侧壁122靠近所述第三侧壁123的一端,连接第一驱动线a另一端的夹线部301固定于所述第二固定板204靠近所述第一侧壁121的一端;连接第二驱动线b一端的夹线部301固定于第一侧壁121靠近所述第四侧壁124的一端,连接第二驱动线b另一端的夹线部301固定于所述第一固定板203靠近所述第二侧壁122的一端;连接第三驱动线c一端的夹线部301固定于第二侧壁122靠近所述第四侧壁124的一端,连接第三驱动线c另一端的夹线部301固定于所述第一固定板203靠近所述第一侧壁121的一端;连接第四驱动线d一端的夹线部301固定于第一侧壁121靠近所述第三侧壁123的一端,连接第四驱动线d另一端的夹线部301固定于所述第二固定板204靠近所述第二侧壁122的一端;如此使得四根驱动线呈井字形排布。
149.当对第二驱动线b和第三驱动线c通电时,第二驱动线b通电后收缩产生的拉力与第三驱动线c通电后收缩产生的拉力的合力,使得所述可移动元件20绕x轴方向顺时针转动;同时,在可移动元件20带动下,第一驱动线a和第四驱动线d随之被拉长。
150.当对第一驱动线a和第四驱动线d通电时,第一驱动线a通电后收缩产生的拉力与第四驱动线d通电后收缩产生的拉力的合力,使得所述可移动元件20绕x轴方向逆时针转动;同时,在可移动元件20带动下,第二驱动线b和第三驱动线c随之被拉长。
151.当对第二驱动线b和第四驱动线d通电时,第二驱动线b通电后收缩产生的拉力与第四驱动线d通电后收缩产生的拉力的合力,使得所述可移动元件20绕y轴方向顺时针转动;同时,在可移动元件20带动下,第一驱动线a和第三驱动线c随之被拉长。
152.当对第一驱动线a和第三驱动线c通电时,第一驱动线a通电后收缩产生的拉力与第三驱动线c通电后收缩产生的拉力的合力,使得所述可移动元件20绕y轴方向逆时针转动;同时,在可移动元件20带动下,第二驱动线b和第四驱动线d随之被拉长。
153.当对第三驱动线c和第四驱动线d通电时,第三驱动线c通电后收缩产生的拉力与第四驱动线d通电后收缩产生的拉力的合力,使得所述可移动元件20绕z轴方向顺时针转动;同时,在可移动元件20带动下,第一驱动线a和第二驱动线b随之被拉长。
154.当对第一驱动线a和第二驱动线b通电时,第一驱动线a通电后收缩产生的拉力与第二驱动线b通电后收缩产生的拉力的合力,使得所述可移动元件20绕z轴方向逆时针转
动;同时,在可移动元件20带动下,第三驱动线c和第四驱动线d随之被拉长。
155.当对第二驱动线b通电时,第二驱动线b通电后收缩产生的拉力,使得所述可移动元件20绕m轴方向顺时针转动;同时,在可移动元件20带动下,第一驱动线a随之被拉长。
156.当对第一驱动线a时,第一驱动线a通电后收缩产生的拉力,使得所述可移动元件20绕m轴方向逆时针转动;同时,在可移动元件20带动下,第二驱动线b随之被拉长。
157.当对第四驱动线d通电时,第四驱动线d通电后收缩产生的拉力,使得所述可移动元件20绕n轴方向顺时针转动;同时,在可移动元件20带动下,第三驱动线c随之被拉长。
158.当对第三驱动线c通电时,第三驱动线c通电后收缩产生的拉力,使得所述可移动元件20绕n轴方向逆时针转动;同时,在可移动元件20带动下,第四驱动线d随之被拉长。
159.其中,z轴方向可以为垂直所述底面201的垂线方向,x轴方向可以为与所述第三侧壁123平行的方向,y轴方向可以为与所述第一侧壁121平行的方向,m轴方向和n轴方向分别为所述底座12的两对角线方向。其中,x轴、y轴和z轴两两垂直,m轴与z轴相互垂直,n轴与z轴相互垂直。
160.本技术中将所述驱动组件30设置于所述可移动元件20的底面201一侧,可以大大减小各驱动线至可移动元件20的中心轴o的距离,从而减小大角度防抖时驱动线的收缩率或伸长率,如此,在驱动线的收缩率或伸长率一定的情况下,实现了更大角度的防抖。此外,本技术中多根驱动线的井字形布局,以通过不同驱动线的出力方式,实现了可移动元件20相对于所述支撑结构10的多轴向的防抖运动。
161.可以理解,所述驱动组件30中驱动线的数量不限于四根。
162.图4为本技术另一实施方式的驱动组件的布局示意图,图5为本技术又一实施方式的驱动组件的布局示意图。在图4和图5所示实施例中,所述驱动组件30包括六根驱动线。其中四根驱动线呈井字形排布,其余两根驱动线与呈井字形排布的四根驱动线中的两根平行设置。
163.为方便描述,将上述六根驱动线分别以第一驱动线a、第二驱动线b、第三驱动线c、第四驱动线d、第五驱动线e及第六驱动线f表示。其中,第一驱动线a、第二驱动线b、第三驱动线c及第四驱动线d如上述方式呈井字形排布,此处不再赘述。
164.如图4所示的实施例中,第五驱动线e与第三驱动线c平行设置,且连接第五驱动线e一端的夹线部301固定于第二侧壁122靠近所述第四侧壁124的一端,连接第五驱动线e另一端的夹线部301固定于所述第一固定板203靠近所述第一侧壁121的一端。第六驱动线f与第四驱动线d平行设置,且连接第六驱动线f一端的夹线部301固定于第一侧壁121靠近所述第三侧壁123的一端,连接第六驱动线f另一端的夹线部301固定于所述第二固定板204靠近所述第二侧壁122的一端。
165.其中,若同一方位上布置了两根驱动线,则所述驱动组件30在工作时可选择让同一方位上的两根驱动线同时工作,或者只让其中一根驱动线工作,或者让两根驱动线轮换着工作,如此可大大提升所述防抖模组1的使用寿命。在其他实施例中,于同一方位上布置驱动线22的数量可依据实际情况进行适应性调整,可以为三根等,此处不作限制。
166.如图4所示的实施例中,于一同一方位上布置了两根驱动线:第五驱动线e与第三驱动线c,那么所述驱动组件30在工作时可选择让第五驱动线e与第三驱动线c同时工作,或者只让第五驱动线e与第三驱动线c中的一根工作,或者让第五驱动线e与第三驱动线c轮换
着工作。同时,于另一同一方位上还布置了两根驱动线:第六驱动线f与第四驱动线d,那么所述驱动组件30在工作时可选择让第六驱动线f与第四驱动线d同时工作,或者只让第六驱动线f与第四驱动线d中的一根工作,或者让第六驱动线f与第四驱动线d轮换着工作。
167.如图5所示的实施例中,第五驱动线e与第一驱动线a平行设置,且连接第五驱动线e一端的夹线部301固定于第二侧壁122靠近所述第三侧壁123的一端,连接第五驱动线e另一端的夹线部301固定于所述第二固定板204靠近所述第一侧壁121的一端。第六驱动线f与第二驱动线b平行设置,且连接第六驱动线f一端的夹线部301固定于第一侧壁121靠近所述第四侧壁124的一端,连接第六驱动线f另一端的夹线部301固定于所述第一固定板203靠近所述第二侧壁122的一端。
168.如图5所示的实施例中,于一同一方位上布置了两根驱动线:第五驱动线e与第一驱动线a,那么所述驱动组件30在工作时可选择让第五驱动线e与第一驱动线a同时工作,或者只让第五驱动线e与第一驱动线a中的一根工作,或者让第五驱动线e与第一驱动线a轮换着工作。同时,于另一同一方位上还布置了两根驱动线:第六驱动线f与第二驱动线b,那么所述驱动组件30在工作时可选择让第六驱动线f与第二驱动线b同时工作,或者只让第六驱动线f与第二驱动线b中的一根工作,或者让第六驱动线f与第二驱动线b轮换着工作。
169.在图6所示的实施例中,所述驱动组件30包括八根驱动线。其中四根驱动线呈井字形排布,其余四根驱动线与呈井字形排布的四根驱动线一一对应平行设置。
170.为方便描述,将上述八根驱动线分别以第一驱动线a、第二驱动线b、第三驱动线c、第四驱动线d、第五驱动线e、第六驱动线f、第七驱动线g及第八驱动线h表示。其中,第一驱动线a、第二驱动线b、第三驱动线c及第四驱动线d如上述方式呈井字形排布,此处不再赘述。
171.在图6所示的实施例中,第五驱动线e与第一驱动线a平行设置,且连接第五驱动线e一端的夹线部301固定于第二侧壁122靠近所述第三侧壁123的一端,连接第五驱动线e另一端的夹线部301固定于所述第二固定板204靠近所述第一侧壁121的一端。第六驱动线f与第二驱动线b平行设置,且连接第六驱动线f一端的夹线部301固定于第一侧壁121靠近所述第四侧壁124的一端,连接第六驱动线f另一端的夹线部301固定于所述第一固定板203靠近所述第二侧壁122的一端。第七驱动线g与第三驱动线c平行设置,且连接第七驱动线g一端的夹线部301固定于第二侧壁122靠近所述第四侧壁124的一端,连接第七驱动线g另一端的夹线部301固定于所述第一固定板203靠近所述第一侧壁121的一端。第八驱动线h与第四驱动线d平行设置,且连接第八驱动线h一端的夹线部301固定于第一侧壁121靠近所述第三侧壁123的一端,连接第八驱动线h另一端的夹线部301固定于所述第二固定板204靠近所述第二侧壁122的一端。
172.如此,所述驱动组件30在工作时,可选择位于同一方位上的第一驱动线a和第五驱动线e中的其中之一工作、两者共同工作或两者轮换工作。同理,位于同一方位上的第二驱动线b和第六驱动线f、位于同一方位上的第三驱动线c和第七驱动线g以及位于同一方位上的第四驱动线d和第八驱动线h,可如位于同一方位上的第一驱动线a和第五驱动线e那样依实际需要选择其中之一工作、两者共同工作或两者轮换工作,此处不再赘述。
173.图7为本技术另一实施方式的防抖模组的结构示意图,图8为图7所示转动组件的结构分解示意图,图9为图7所示转动组件的剖视图。如图7、图8和图9所示,在进一步的实施
例中,所述防抖模组1还包括转动组件40。所述转动组件40设置于所述底面201,为所述驱动组件30提供稳定的旋转轴心。
174.所述转动组件40包括基座41及连接部42。其中,所述连接部42的一端固定连接于所述底面201,所述连接部42的另一端可转动地连接于所述基座41。
175.所述基座41包括朝向所述可移动元件20的顶面411。所述顶面411设有凹槽412。所述凹槽412包括槽底面4121及围设于所述槽底面4121周缘的槽侧面4122。所述槽底面4121包括弧面4123及连接于所述弧面4123和所述槽侧面4122之间的平面4124。所述弧面4123相对所述平面4124内凹。
176.所述连接部42包括第一连接分部421及第二连接分部422。所述第一连接分部421包括与所述弧面4123配合的配合面4211及背对所述配合面4211的连接面4212。所述配合面4211活动抵持于所述弧面4123,且所述第一连接分部421相对所述弧面4123可转动。所述第二连接分部422固定连接于所述底面201和所述连接面4212之间。如此,当驱动组件30驱动所述可移动元件20转动时,固定连接于所述底面201的第二连接分部422在所述可移动元件20的带动下,可相对所述弧面4123转动。
177.进一步地,所述转动组件40还包括盖板43。所述盖板43连接所述顶面411。所述第二连接分部422的一端穿过所述盖板43与所述底面201固定连接。
178.在一些实施例中,所述盖板43上开设有通孔431。所述通孔431连通所述凹槽412。所述第二连接分部422穿过所述通孔431以与所述底面201固定连接。其中,第一连接分部421的尺寸小于所述通孔431的尺寸,如此,通过所述盖板43的设置可以防止连接部42脱离基座41。此外,所述盖板43和所述连接部42之间具有间隙,如此才可使得所述连接部42相对所述基座41转动。
179.如图8所示的实施例中,所述盖板43包括两顶板432。所述顶板432呈扇环结构,如此,两所述顶板432连接以围设形成所述通孔431。可以理解,在其他实施例中,所述顶板432的形状不限,只要能起到防止连接部42脱离基座41的作用即可。
180.在一些实施例中,所述防抖模组1还包括电路板50。参图10,为本技术另一实施例的防抖模组的结构示意图。图11为图10所示防抖模组在另一视角下的结构示意图。如图示所示的实施例,所述电路板50设置于所述底座12背对所述可移动元件20的表面。所述电路板50电连接所述驱动组件30,用于控制所述驱动组件30中的各驱动线,以实现对可移动元件20多轴向的驱动。
181.在一些实施例中,所述防抖模组1还包括壳体60。参图12,为本技术另一实施例的防抖模组的结构示意图;参图13,为图12所示防抖模组的结构分解示意图。如图示所示的实施例,所述壳体60包括上壳体61及底板62。所述上壳体61设置于所述底板62,并限定出用于收容所述可移动元件20、所述支撑结构10、所述驱动组件30、所述转动组件40及所述电路板50的收容空间63。其中,所述支撑结构10设置于所述底板62,所述电路板50设置于所述支撑结构10和所述底板62之间。
182.如图12所示的实施例中,所述上壳体61上开设有入光孔611。所述入光孔611连通所述收容空间63。
183.其中,所述上壳体61上还可开设有开口612。所述开口612连通所述收容空间63。其中,所述可移动元件20上的柔性电路板21通过所述开口612外露于所述壳体60。
184.参图10,在本实施例中,所述电路板50上开设有穿孔501。如此,所述基座41可穿过所述穿孔501,以固定于所述底板62。
185.在一些实施例中,所述底板62和所述上壳体61不限于通过焊接等方式固定在一起。
186.其中,所述壳体60的设置用于保护所述可移动元件20、所述支撑结构10、所述驱动组件30、所述转动组件40及所述电路板50。可以理解,在其他实施例中,所述壳体60可省略。
187.本技术上述各实施例中的防抖模组1可应用于各类用户设备2。所述用户设备2可以,但不限于是穿戴设备,车载终端,个人移动终端,个人计算机,多媒体播放器、电子阅读器,智能家居设备,或机器人等。所述个人移动终端也可以是智能手机,或平板电脑等。所述穿戴设备还可以是智能手环,或智能医疗设备,或头戴式终端等。所述头戴式终端设备可以是虚拟现实,或增强现实的终端等,例如:谷歌眼镜。所述智能医疗设备可以是智能测血压设备,或智能测血糖设备等。所述智能家居设备可以是智能门禁系统等。所述机器人可以是其他各种具有拍照或摄像功能的电子设备等。参图14,为本技术一实施例的用户设备的模块示意图。如图示所示的实施例,所述用户设备2还包括检测器3,例如:陀螺仪等。其中,所述检测器3用于检测所述用户设备2在拍摄过程中因手抖或外界抖动等情况下而发生的角度偏移,并生成对应的输出信号,所述电路板50接收并响应该输出信号以控制对应的驱动线通电,让可移动元件20反向运动来抵消用户设备2的抖动,以补偿拍摄期间因手抖或外界抖动等因素所引起的图形模糊。
188.在进一步地实施方式中,参图14,所述用户设备2还包括控制器5。其中,所述控制器5设置于控制电路板上。所述控制电路板上设有引脚。所述控制器5通过所述引脚与所述电路板50电性连接,以实现与所述驱动组件30的电性连接。如此,所述控制器5将根据接收到的所述检测器3生成的输出信号,通过控制电路板和所述电路板50输送电流给对应的驱动线,以使得对应的驱动线驱动可移动元件20反向运动来抵消用户设备2的抖动,进而补偿拍摄期间因手抖或外界抖动等因素所引起的图形模糊。在其他可替代的方案中,所述控制电路板上还可设置引线、电连接器等结构与所述电路板50实现电性连接。其中,所述控制电路板和所述电路板50之间的连接方式不限,只要保证所述控制器5和所述驱动组件30之间电性连接即可。
189.参图15为本技术一实施例的用户设备的结构示意图。如图示所示的实施例,所述用户设备2为一手机。所述用户设备2包括外壳4及收容于所述外壳4内的所述防抖模组1和所述检测器3。所述外壳4至少包括镜头孔401。其中,所述上壳体61上的入光孔611与所述镜头孔401对应设置。可以理解,在其他实施例中,所述用户设备2还不限于包括图像传感器等实现其预设功能的电子元件。
190.以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何在本技术揭露的技术范围内的变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。