技术特征:
1.一种用于对用于控制激光机器(l)的切割头(h)的控制指令(ci)进行计算的计算机实现的方法,所述激光机器的切割头用于切割工件中的一组轮廓,所述方法包括以下方法步骤:—读取(s71)编码的切割计划(p);—借助于一组传感器信号(sens)连续地确定(s73)与由所述激光机器(l)进行的所述工件的处理相关的状态;—提供计算机实现的决策代理(da),所述决策代理(da)使用所述编码的切割计划(p)和所确定的状态(s)通过访问训练模型动态地对加工头(h)接下来要采取的动作(a)进行计算并且基于计算出的动作来提供用于执行所述处理计划(p)的控制指令(ci)。2.根据权利要求1所述的方法,其中,所述模型接收特别地以多层图像优选地以多层图像矩阵形式的所述状态(s)和所述编码的切割计划(p)作为输入以及提供要转发至所述激光机器(l)上的机器控制器(mc)以供接下来执行的动作(a)作为输出。3.根据前述权利要求中任一项所述的方法,其中,在执行每个动作(a)之后,所述动作(a)将基于接收到的传感器信号(sens)接收奖励,以及其中,所述决策代理(da)包括用于执行优化函数以便使针对所有动作(a)的全局奖励最大化的奖励模块(rf)。4.根据前述权利要求中任一项所述的方法,其中,所述状态(s)包括所述激光机器(l)的状态、已处理的工作部件的状态以及要处理的工件的状态。5.根据前述权利要求中任一项所述的方法,其中,在通过所述激光机器(l)基于计算出的动作(a)执行控制指令(ci)之后和/或期间,来自一组传感器(s)的经验数据被聚合并被反馈至所述模型,以便连续地改进所述模型。6.根据前述权利要求中任一项所述的方法,其中,以多层图像形式优选地以多层图像矩阵形式表示所述状态(s),所述状态至少包括以正在处理的工件的层图像形式的第一子状态(s1)和以所述工件的层图像形式的第二子状态(s2),在所述第一子状态(s1)中已处理的部件与仍未处理的部件是不同的,在所述第二子状态(s2)中表示了根据所述切割计划(p)处理的工件的热力图。7.根据前述权利要求中任一项所述的方法,其中,奖励函数(rf)选自包括以下的组:切割时间奖励函数、热优化奖励函数、温度积分测量奖励函数和碰撞避免奖励函数。8.根据直接前述权利要求所述的方法,其中,所述奖励函数(rf)是使用用户限定的优先级作为权重的所有奖励函数的线性组合。9.根据前述权利要求中任一项所述的方法,其中,针对特定优化目标确定特定奖励函数(rf)。10.根据前述权利要求中任一项所述的方法,其中,作为自学习代理的所述决策代理(da)能够通过q表建模和/或根据所述q表行动,能够借助于q函数生成所述q表,其中,所述q表使状态-动作组合的质量形式化以用于针对所述激光机器(l)的每一步动态地评估和计算接下来的动作。11.根据前述权利要求中任一项所述的方法,其中,所述决策代理(da)实现q函数,并且所述q函数能够由深度神经网络特别是深度卷积神经网络(cnn)表示。12.根据前述权利要求中任一项所述的方法,其中,所述决策代理(da)被实现为至少一个神经网络并且使用经验回放技术用于训练。
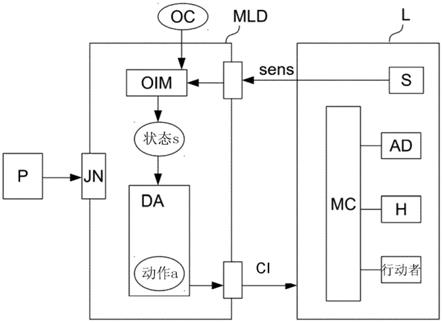
13.一种适于执行根据前述方法权利要求之一的方法的机器学习设备(mld),所述机器学习设备包括:—输入接口(jn),所述输入接口(jn)用于读取(s71)编码的切割计划(p);—观察结果解释模块(oim),所述观察结果解释模块(oim)用于借助于一组传感器(s)连续地确定(s73)与由所述激光机器(l)进行的所述工件的处理相关的状态;—决策代理(da),所述决策代理(da)使用所述编码的切割计划(p)和所确定的状态(s)通过访问训练模型动态地对所述加工头(h)接下来要采取的动作(a)进行计算并且基于计算出的动作来提供用于执行所述处理计划(p)的控制指令(ci)。14.一种根据前述权利要求所述的机器学习设备(mld)中的决策代理(da)。15.一种包括程序元素的计算机程序,所述计算机程序在所述程序元素被加载至计算机的存储器中时使得所述计算机执行根据前述方法权利要求之一所述的用于对用于控制激光机器(l)的加工头(h)的控制指令(ci)进行计算的方法的步骤。
技术总结
在一方面,本发明涉及用于对用于控制激光机器(L)的切割头(H)的控制指令(CI)进行计算的方法,该激光机器的切割头用于切割工件中的一组轮廓。所述方法包括:读取(S71)编码的切割计划(P);以及借助于一组传感器信号(sens)连续地确定(S73)与由激光机器(L)进行的工件的处理相关的状态。此外,所述方法提供计算机实现的决策代理(DA),所述决策代理(DA)使用编码的切割计划(P)和所确定的状态(s)通过访问训练模型动态地对加工头(H)接下来要采取的动作(a)进行计算并且基于计算出的动作来提供用于执行处理计划(P)的控制指令(CI)。执行处理计划(P)的控制指令(CI)。执行处理计划(P)的控制指令(CI)。
技术研发人员:亚历山大
受保护的技术使用者:百超激光有限公司
技术研发日:2020.08.19
技术公布日:2022/4/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。