技术特征:
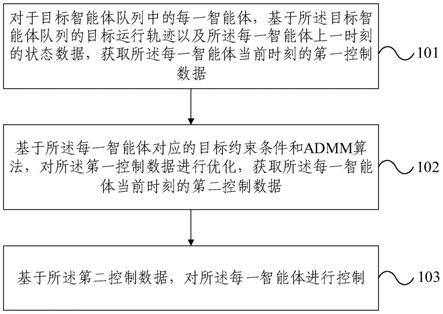
1.一种多智能体编队控制方法,其特征在于,包括:对于目标智能体队列中的每一智能体,基于所述目标智能体队列的目标运行轨迹以及所述每一智能体上一时刻的状态数据,获取所述每一智能体当前时刻的第一控制数据;基于所述每一智能体对应的目标约束条件和admm算法,对所述第一控制数据进行优化,获取所述每一智能体当前时刻的第二控制数据;基于所述第二控制数据,对所述每一智能体进行控制。2.根据权利要求1所述的多智能体编队控制方法,其特征在于,所述基于所述第二控制数据,对所述每一智能体进行控制,具体包括:获取所述每一智能体当前时刻对应的第一干扰数据和目标历史时段内所述每一智能体对应的第二干扰数据;基于所述第一干扰数据和所述第二干扰数据,对所述第二控制数据进行修正,获取所述每一智能体当前时刻的第三控制数据;基于所述第三控制数据,对所述每一智能体进行控制。3.根据权利要求1所述的多智能体编队控制方法,其特征在于,所述基于所述每一智能体对应的目标约束条件和admm算法,对所述第一控制数据进行优化,获取所述每一智能体当前时刻的第二控制数据,具体包括:基于所述目标约束条件和所述第一控制数据,获取所述每一智能体对应的目标函数;基于admm算法对所述目标函数进行迭代计算,并获取所述迭代计算的结果,作为所述第二控制数据。4.根据权利要求2所述的多智能体编队控制方法,其特征在于,所述基于所述第一干扰数据和所述第二干扰数据,对所述第二控制数据进行修正,获取所述每一智能体当前时刻的第三控制数据,具体包括:基于所述第一干扰数据和所述第二干扰数据,获取所述每一智能体当前时刻对应的修正参数;基于所述修正参数,对所述第二控制数据进行修正,获取所述第三控制数据。5.根据权利要求1至4任一所述的多智能体编队控制方法,其特征在于,所述基于所述目标智能体队列的目标运行轨迹以及所述每一智能体上一时刻的状态数据,获取所述每一智能体当前时刻的第一控制数据,具体包括:基于所述目标运行轨迹,构建目标计算模型;将所述每一智能体上一时刻的状态数据,输入所述目标计算模型,获取所述目标计算模型输出的所述第一控制数据。6.根据权利要求5所述的多智能体编队控制方法,其特征在于,所述基于所述目标运行轨迹,构建目标计算模型,具体包括:基于所述目标运行轨迹,对预先构建的运动学模型进行线性化处理,获取线性化误差模型;基于所述线性化误差模型,构建所述目标计算模型。7.一种多智能体编队控制装置,其特征在于,包括:数据获取模块,用于对于目标智能体队列中的每一智能体,基于所述目标智能体队列的目标运行轨迹以及所述每一智能体上一时刻的状态数据,获取所述每一智能体当前时刻
的第一控制数据;数据优化模块,用于基于所述每一智能体对应的目标约束条件和admm算法,对所述第一控制数据进行优化,获取所述每一智能体当前时刻的第二控制数据;编队控制模块,用于基于所述第二控制数据,对所述每一智能体进行控制。8.一种多智能体系统,其特征在于,包括:如权利要求7所述的多智能体编队控制装置和多个智能体。9.一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1至6任一项所述多智能体编队控制方法的步骤。10.一种非暂态计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至6任一项所述多智能体编队控制方法的步骤。
技术总结
本发明提供一种多智能体编队控制方法、装置及多智能体系统,该方法包括:对于目标智能体队列中的每一智能体,基于目标智能体队列的目标运行轨迹以及每一智能体上一时刻的状态数据,获取每一智能体当前时刻的第一控制数据;基于每一智能体对应的目标约束条件和ADMM算法,对第一控制数据进行优化,获取每一智能体当前时刻的第二控制数据;基于第二控制数据,对每一智能体进行控制。本发明提供的多智能体编队控制方法、装置及多智能体系统,能基于ADMM算法实现每一智能体对应的目标约束条件的解耦,能将复杂的问题分解为多个子问题,能实现更精确的多智能体编队控制,能降低计算难度、提高计算速度和效率,对计算设备的要求更低。更低。更低。
技术研发人员:赵然 苗茂之 逯嘉敏
受保护的技术使用者:中国农业大学
技术研发日:2021.12.06
技术公布日:2022/4/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。