1.本实用新型一般涉及半导体制造技术领域,具体涉及一种用于束带机的工装。
背景技术:
2.驱动ic从圆片切割成若干个子ic片,然后,捡晶机将子ic片挑拣到承载盘中,再将若干承载盘层叠设置,相邻两个承载盘之间通过泰维克纸分隔,最后,束带机将堆叠设置的若干个承载盘包装在一起。
3.在相关技术中,层叠设置的若干个承载盘自捡晶机转运至束带机过程中,存在承载盘翻盘现象,导致子ic片损坏。
技术实现要素:
4.鉴于现有技术中的上述缺陷或不足,期望提供一种用于束带机的工装。
5.本技术提供一种用于束带机的工装,其包括:
6.本体,包括用于与上一道工序的工作面相平齐的工作面,工件能够由所述上一道工序的工作面平滑至所述本体的工作面;
7.支撑件,连接至所述本体,所述支撑件包括用于支撑束带机的支撑面,所述支撑面低于所述本体的工作面,以使所述本体的工作面与所述束带机的工作面平齐。
8.作为可选的方案,所述本体上设置有用于放置所述束带机的容纳槽,所述本体自其工作面向内部凹陷形成所述容纳槽,所述容纳槽的底板被配置为所述支撑件。
9.作为可选的方案,所述本体还包括围设于所述本体的工作面的侧面,所述侧面上设置有开孔,所述开孔与所述容纳槽连通。
10.作为可选的方案,还包括推拉机构,所述推拉机构用于使所述支撑件拉出和推回于所述容纳槽。
11.作为可选的方案,所述推拉机构包括滑轨和沿所述滑轨滑动连接的托架,所述滑轨垂直于所述侧面,所述支撑件连接至所述托架。
12.作为可选的方案,还包括伸缩机构,所述伸缩机构连接至所述支撑件,以使所述支撑面至所述本体的工作面的距离能够调节。
13.作为可选的方案,所述伸缩机构为滚珠丝杠机构,所述滚珠丝杆机构沿竖直方向设置,所述滚珠丝杆机构驱动所述支撑件靠近和远离所述本体的工作面。
14.作为可选的方案,还包括调平机构,所述本体包括支脚,所述调平机构连接至所述支脚。
15.作为可选的方案,所述调平机构包括螺杆和连接至所述螺杆的一端的平台件,所述支脚远离所述本体的工作面的端部与所述螺杆的另一端螺纹连接。
16.作为可选的方案,所述支撑面与所述本体的工作面相平行。
17.本技术的工装衔接捡晶机与束带机,在层叠设置的若干个承载盘转运时,能够保证层叠设置的承载盘平滑于捡晶机与束带机之间,避免层叠设置的承载盘的跌落,进而杜
绝ic片的损坏。
附图说明
18.通过阅读参照以下附图所作的对非限制性实施例所作的详细描述,本技术的其它特征、目的和优点将会变得更明显:
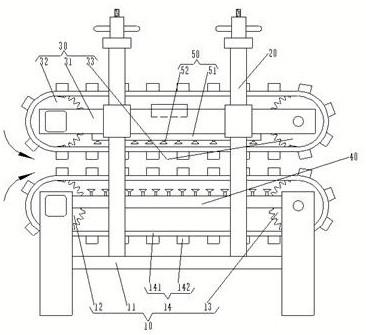
19.图1为本实用新型实施例提供的一种用于束带机的工装的结构示意图;
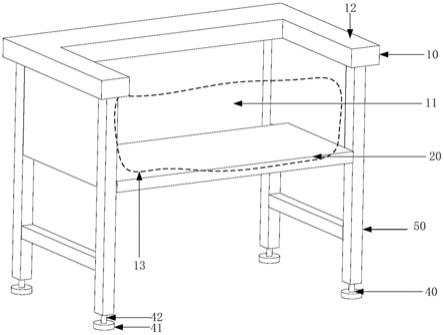
20.图2为本实用新型实施例提供的推拉机构的结构示意图。
具体实施方式
21.下面结合附图和实施例对本技术作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释相关实用新型,而非对该实用新型的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与实用新型相关的部分。
22.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本技术。
23.本实用新型使用的术语是仅仅出于描述特定实施例的目的,而非旨在限制本实用新型。在本实用新型和所附权利要求书中所使用的单数形式的“一种”、“所述”和“该”也旨在包括多数形式,除非上下文清楚地表示其他含义。还应当理解,本文中使用的术语“和/或”是指并包含一个或多个相关联的列出项目的任何或所有可能组合。
24.图1示出了一种用于束带机的工装的结构示意图。
25.如图1所示,用于束带机的工装包括本体10和支撑件20。本体10包括用于与上一道工序的工作面相平齐的工作面12,工件能够由上一道工序的工作面平滑至本体10的工作面12;支撑件20连接至本体10,支撑件20包括用于支撑束带机的支撑面,支撑面低于本体10的工作面12,以使工件能够由本体10的工作面12平滑至束带机的工作面。
26.需要说明的是,本体10包括工作部和支撑部,工作部大致为立方体,工作部的上表面即为本体10的工作面12;支撑件20可以为板状、杆状或者其他合适的形状。支撑件20的支撑面低于本体10的工作面12,并且支撑件20的支撑面距离本体10的工作面12存在预设距离,使得位于支撑件20上的束带机的工作面能够与本体10的工作面12平齐,束带机的工作面与本体10的工作面12无缝衔接或者存在微小间隙,承载盘能够从本体10的工作面12平滑至束带机的工作面。
27.在相关技术中,层叠设置的若干个承载盘自捡晶机转运至束带机过程中,存在承载盘翻盘现象,导致子ic片损坏。
28.基于此,本技术提出一种用于束带机的工装,该工装衔接捡晶机与束带机,在层叠设置的若干个承载盘转运时,能够保证层叠设置的承载盘平滑于捡晶机与束带机之间,避免层叠设置的承载盘的跌落,进而杜绝ic片的损坏。
29.作为可实现的方式,支撑件20的支撑面与本体10的工作面12相平行,有利于束带机平稳设置于支撑件20上。
30.作为可实现的方式,本体10上设置有用于放置束带机的容纳槽11,本体10自其工作面12向内部凹陷形成上述的容纳槽11,容纳槽11的底板被配置为支撑件20。
31.需要说明的是,容纳槽11的空间能够容纳束带机,束带机设置于容纳槽11内,避免
束带机占用多余空间,使得工装的结构紧凑。
32.作为可实现的方式,束带机的工作面密闭容纳槽11的开口,且束带机的工作面平齐于容纳槽11的开口。
33.需要说明的是,束带机与容纳槽11卡插配合,即束带机的工作面封闭容纳槽11的开口,且束带机的工作面平齐于容纳槽11的开口,使得束带机的工作面与容纳槽11的开口之间不存在间隙,二者无缝衔接,有利于承载盘平滑至束带机的工作面。
34.作为可实现的方式,本体10还包括围设于本体10的工作面12的侧面,侧面上设置有开孔13,开孔13与容纳槽11连通。
35.需要说明的是,在侧面开设连通容纳槽11的开孔13(如图1中虚线的闭环所示),此时容纳槽11的横截面大致为c形。也就是说,支撑面至本体10的工作面12对应的部分侧面向本体10的内部凹陷形成如图1所述的缺口,该缺口内设置有推拉机构30。推拉机构30使得束带机能够位于容纳槽11内,也可以使得束带机能够位于容纳槽11之外,便于检修束带机。
36.参考图2,进一步地,推拉机构30包括滑轨31和沿滑轨31滑动连接的托架32。两个滑轨31间隔设置且均垂直于上述的侧面,托架32位于两个滑轨31之间,托架32与滑轨31滑动配合。支撑件20连接至托架32上。托架32受到拉力,带动支撑件20向容纳槽11外运动,以使束带机能够位于容纳槽11之外;托架32受到推力,带动支撑件20向容纳槽11内运动,以使束带机能够位于容纳槽11内。
37.上述的推拉机构30,结构简单,有利于束带机平稳运动。
38.作为可实现的方式,用于束带机的工装还包括伸缩机构(未示出),伸缩机构连接至支撑件20,以使支撑面至本体10的工作面12的距离能够调节,使得该工装适应于多种规格的束带机。
39.需要说明的是,伸缩机构可以为电动推杆、液压推杆及滚珠丝杆机构等。在具体实施例中,滚珠丝杆机构包括滚珠丝杆及滑动连接于滚珠丝杆的滑块,滚珠丝杆沿竖直方向设置,支撑件20连接至滑块,滑动带动支撑件20靠近和远离本体10的工作面12。滚珠丝杆机构调节精度高,能够调节需求。
40.作为可实现的方式,用于束带机的工装还包括调平机构40,本体10包括支脚50,调平机构40连接至支脚50。调平机构40能够调节本体10的工作面12的水平度,通过调平机构40和伸缩机构双重作用调整本体10的工作面12与束带机的工作面相平齐,进一步保证效果且提高调节效率。
41.参考图1,在具体实施中,支撑部为若干个支脚50。调平机构40包括螺杆42和连接至螺杆42的一端的平台件41,平台件41可以与地面相贴合。一个调平机构40与一个支脚50相对应,支脚50远离所述本体10的工作面12的端部设置有带螺纹的盲孔,所述螺杆42的另一端与该盲孔螺纹连接。通过旋转螺杆42,改变螺杆42与盲孔配合的端部伸入盲孔内的长度,进而调节本体10的工作面12的水平度。
42.上述调平机构40,结构简单,调节方便。
43.以上描述仅为本技术的较佳实施例以及对所运用技术原理的说明。本领域技术人员应当理解,本技术中所涉及的实用新型范围,并不限于上述技术特征的特定组合而成的技术方案,同时也应涵盖在不脱离所述实用新型构思的情况下,由上述技术特征或其等同特征进行任意组合而形成的其它技术方案。例如上述特征与本技术中公开的(但不限于)具
有类似功能的技术特征进行互相替换而形成的技术方案。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。