1.本发明涉及机器人通过设备的技术领域,具体地,涉及一种机器人通过设备的方法及系统。尤其是,优选的涉及一种机器人过门禁或闸门的方法。
背景技术:
2.目前机器人通过门禁或闸机等设备是出现在很多场合中。
3.公开号为cn110349314a的中国发明专利文献公开了一种机器人通过门禁或闸机设备的控制方法,包括如下步骤:在机器人到达距离设备一个预设距离范围时,所述机器人向控制所述设备的服务器发送一个通过所述设备的请求;所述机器人获取所述设备的状态;所述机器人判断所述设备的状态;如果所述设备处于锁定状态,则等待预设时长后再发出通过所述设备的请求,如果所述设备处于空闲状态,则使所述设备处于锁定状态并驱动所述机器人通过所述设备;在所述机器人通过所述设备后,使所述设备处于空闲状态。
4.针对上述中的相关技术,发明人认为在门禁或闸机等设备距离比较近的环境里,机器人较难判断决策打开预要通过门禁或者闸机,进而机器人通过门禁或者闸机等设备的顺滑性较差。
技术实现要素:
5.针对现有技术中的缺陷,本发明的目的是提供一种机器人通过设备的方法及系统。
6.根据本发明提供的一种机器人通过设备的方法,包括如下步骤:
7.步骤s1:机器人判断并打开预要通过的设备;
8.步骤s2:机器人通过打开的设备。
9.优选的,所述步骤s1包括如下步骤:
10.预设标记点步骤:设定每个设备的展开范围e,在展开范围e中预设标记点;
11.阈值计算步骤:设置阈值f,并实时计算阈值f的范围;
12.判断步骤:机器人根据阈值f范围内的标记点选取预要通过的设备;
13.打开步骤:机器人控制预要通过的设备打开。
14.优选的,该方法还包括如下步骤;
15.加载标记点步骤:机器人预先加载标记点;
16.距离计算步骤:机器人实时计算当前位置距离标记点的距离。
17.优选的,该方法还包括步骤s3;
18.步骤s3:机器人在通过打开的设备的过程中,开始计算当前位置与打开的设备对应标记点的距离是否大于开门范围e,进而进行关门操作。
19.优选的,在所述判断步骤中,机器人从阈值f开始走到预定范围之间的距离内,阈值f内标记点仅有一个,机器人走进预定范围内,阈值f内标记点仅有一个;获取标记点对应的设备;
20.优选的,在所述判断步骤中,机器人从阈值f走到预定范围之间的距离内,标记点为多个,计算目标值l
[0021][0022]
其中,j为机器人当前位置和各个标记点连线的角度;k为机器人行驶方向的角度;n表示从阈值f走到预定范围之间的距离内,每隔预定时间计算一次的总个数;
[0023]
机器人走进预定范围内,比较处于阈值f内的标记点的目标值l,,选取预定的标记点的目标值对应的设备。
[0024]
根据本发明提供的一种机器人通过设备的系统,包括如下模块:
[0025]
模块m1:机器人判断并打开预要通过的设备;
[0026]
模块m2:机器人通过打开的设备。
[0027]
优选的,所述模块m1包括如下模块:
[0028]
预设标记点模块:设定每个设备的展开范围e,在展开范围e中预设标记点;
[0029]
阈值计算模块:设置阈值f,并实时计算阈值f的范围;
[0030]
判断模块:机器人根据阈值f范围内的标记点选取预要通过的设备;
[0031]
打开模块:机器人控制预要通过的设备打开。
[0032]
优选的,该系统还包括如下模块;
[0033]
加载标记点模块:机器人预先加载标记点;
[0034]
距离计算模块:机器人实时计算当前位置距离标记点的距离。
[0035]
优选的,该系统还包括模块m3;
[0036]
模块m3:机器人在通过打开的设备的过程中,开始计算当前位置与打开的设备对应标记点的距离是否大于开门范围e,进行关门操作。
[0037]
与现有技术相比,本发明具有如下的有益效果:
[0038]
1、本发明通过机器人运动过程状态信息的动态计算,预判出机器人将要通过的门禁/闸门,解决了多个距离较近的门禁/闸门的选择的问题;
[0039]
2、本发明在门禁或闸机等设备距离比较近的环境里,机器人基于当前状态等信息,通过自主判断决策打开预要通过门禁或者闸机,实现准确高效的对门禁或者闸机等设备的控制,让机器人更顺滑的通过门禁或者闸机;
[0040]
3、本发明无需在路径规划的时候去预先判断是否经过门禁或闸机,在机器人经过该门禁或闸机附近自行判断;
[0041]
4、本发明使用评分标准来决定判断经过的门禁或闸门,提高了系统的容错能力;
[0042]
5、增加了随着机器人速度来判断阈值范围,提高了充分判断的时间,提高了系统的容错能力。
附图说明
[0043]
通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
[0044]
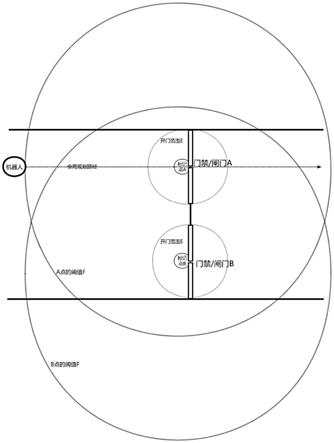
图1为本发明机器人通过设备的示意图。
具体实施方式
[0045]
下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
[0046]
本发明实施例一公开了一种机器人过门禁或闸门的方法,如图1所示,包括如下步骤:步骤s1:机器人判断并打开预要通过的设备。
[0047]
步骤s1包括如下步骤:预设标记点步骤:设定每个设备的展开范围e,在展开范围e中预设标记点。具体为,各个门禁或者闸机等设备的展开范围为e,在展开范围e的中心点分别预设一个的标记点a,b(标记点带有位置信息)。
[0048]
加载标记点步骤:机器人预先加载标记点。具体为,机器人在进入指定区域之前会预先加载指定区域标记点位a、b。指定区域为含有标记点的区域。机器人加载含有标记点的区域地图的时候,预加载标记点a、b。机器人进入指定区域需要预加载地图,加载地图会读取该地图对应的所有标记点。
[0049]
距离计算步骤:机器人实时计算当前位置距离标记点的距离。具体为,机器人实时计算当前位置距离a点位的距离h1,距离b点位为h2。
[0050]
阈值计算步骤:设置阈值f,并实时计算阈值f的范围。具体为,实时计算阈值f的范围(半径为走廊宽度的1.5倍 机器人当前速度*5的圆)。走廊宽度指的是设备门(即门禁的门或者门闸的门)的宽度,在标记点a、b的时候,实际测量出来。机器人速度为匀速运行。机器人的速度是根据设备能允许的运行能力的情况下的一个速度。阈值f跟随机器人的速度进行变化,目的是提高充分判断的时间。指定区域范围包括阈值f的范围。
[0051]
判断步骤:机器人根据阈值f范围内的标记点选取预要通过的设备。机器人从阈值f开始走到预定范围之间的距离内,阈值f内标记点仅有一个,机器人走进预定范围内,阈值f内标记点仅有一个;获取标记点对应的设备。具体为,仅仅有一个门禁或闸机进入该阈值f范围内。从阈值f开始走到开门范围e 0.5米这段距离内,有一个a(或者b)点在该阈值f内(h1(或h2)小于f),直到走出上述这段距离,还是一个点位在该阈值f的范围内。通过机器人当前位置坐标值与标记点坐标值得到距离标记点的距离,使用该距离分别比较f和e 0.5,判断机器人处于阈值f开始走到开门范围e 0.5米这段距离内或外。
[0052]
打开步骤:机器人控制预要通过的设备打开。具体为,机器人开始减速,与门禁/闸门a(或者门禁/闸门b)的控制端发送开门指令,检测开门成功。
[0053]
步骤s2:机器人通过打开的设备。具体为,机器人通过门禁/闸门a(或者门禁/闸门b)。
[0054]
步骤s3:机器人在通过打开的设备的过程中,开始计算当前位置与打开的设备对应标记点的距离是否大于开门范围e,进而进行关门操作。具体为,在通过门禁/闸门a(或者门禁/闸门b)过程中,开始计算h1(h2)距离是否大于开门范围e,当大于e后,发送关闭a(或者b)门的操作。只有一个点进入该检查区的过程完成。即机器人只进入了一个点的阈值f范围内的过程完成。
[0055]
本发明实施例一还公开了一种机器人通过设备的系统,包括如下模块:模块m1:机器人判断并打开预要通过的设备。
[0056]
模块m1包括如下模块:预设标记点模块:设定每个设备的展开范围e,在展开范围e中预设标记点。加载标记点模块:机器人预先加载标记点。距离计算模块:机器人实时计算当前位置距离标记点的距离。阈值计算模块:设置阈值f,并实时计算阈值f的范围。判断模块:机器人根据阈值f范围内的标记点选取预要通过的设备。打开模块:机器人控制预要通过的设备打开。
[0057]
模块m2:机器人通过打开的设备。
[0058]
模块m3:机器人在通过打开的设备的过程中,开始计算当前位置与打开的设备对应标记点的距离是否大于开门范围e,进行关门操作。
[0059]
本发明实施例二还公开了一种机器人通过设备的方法,如图1所示,与实施例一的不同之处在于,在判断步骤中,机器人从阈值f走到预定范围之间的距离内,标记点为多个。具体为,有多个门禁或闸机进入该阈值f范围内。从阈值f开始走到开门范围e 0.5米这段距离内,有多个点位在该范围f内。
[0060]
开始计算目标值l
[0061][0062]
其中,j为机器人当前位置和各个标记点连线的角度;k为机器人行驶方向的角度;n表示从阈值f走到预定范围之间的距离内,每隔预定时间计算一次的总个数;即从阈值f走到预定范围之间的距离内,每隔100毫秒计算一次的总个数。目标值l为评分值,取值最小的为最优值。
[0063]
机器人走进预定范围内,比较处于阈值f内的标记点的目标值l,选取预定的标记点的目标值对应的设备。具体为,当进入开门范围e 0.5米的范围内后,比较与各个门禁/闸门标记点的计算出来的目标值l,得到最小的值l所对应的那个门禁/闸门点。该门禁/闸门点就是要通过的目标门禁/闸门点。
[0064]
在打开步骤中,控制打开该目标门禁/闸门点,检测开门成功。
[0065]
在步骤s2中,机器人通过该目标门禁/闸门点。
[0066]
在步骤s3中,在通过目标门禁/闸门过程中,开始计算与目标门禁/闸门对应标记点的距离是否大于开门范围e,当大于e后,发送关闭目标门的操作。多个点进入该检查区的过程完成。
[0067]
本领域技术人员知道,除了以纯计算机可读程序代码方式实现本发明提供的系统及其各个装置、模块、单元以外,完全可以通过将方法步骤进行逻辑编程来使得本发明提供的系统及其各个装置、模块、单元以逻辑门、开关、专用集成电路、可编程逻辑控制器以及嵌入式微控制器等的形式来实现相同功能。所以,本发明提供的系统及其各项装置、模块、单元可以被认为是一种硬件部件,而对其内包括的用于实现各种功能的装置、模块、单元也可以视为硬件部件内的结构;也可以将用于实现各种功能的装置、模块、单元视为既可以是实现方法的软件模块又可以是硬件部件内的结构。
[0068]
在本技术的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
[0069]
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。