1.本发明涉及智能开采设备技术领域,尤其是一种支撑式液压支架支护姿态监测及控制方法。
背景技术:
2.在井下开采工作面,液压支架是关键的支护装备,担负着支撑顶板,保证煤机行人安全作业空间等作用。支架的使用过程中,液压支架姿态监控工作存在的问题包括:截割动作发生后,支架没有快速升起支护工作面顶板导致顶板暴露时间过长,不利于顶板控制;液压支架的工作姿态,缺乏实时监测反馈的方式,尤其是顶梁前端、顶梁后端单点承载的低头、高射炮承载姿态;液压支架姿态和支架参数之间缺乏对应的关系,地面控制中心难以实现对当前支护状态的虚拟视控及远程干预。
3.现有技术中,面向掩护式液压支架的工作姿态确定方法以及确定支架姿态后获取支架合理支护阻力及其支护位置的计算方法,可实现对掩护式液压支架运行姿态及支护状态的远程监控。面向支撑掩护式液压支架的运行姿态在线监测方法,通过在支架顶梁、连杆布置角度传感器,在立柱布置压力传感器,获取支架在支护过程表现的受力特征和支护姿态监测。
4.现有的监测方案多针对液压支架支护姿态的监测而不能有效的对液压支架未来姿态进行精确控制。
技术实现要素:
5.为了实现对液压支架动作姿态的全时监测、精准控制,进而有效的控制顶板沉降,实时评估支护质量,本发明提供了一种支撑式液压支架支护姿态监测及控制方法,具体的技术方案如下。
6.一种支撑式液压支架支护姿态监测及控制方法,包括:
7.a.支架姿态监测过程:
8.a1.利用液压支架的立柱液位传感器读取前立柱和后立柱的长度参数;
9.a2.结合支架的长度参数和角度参数关系建立姿态监测数学模型;
10.a3.利用插值算法求解姿态监测数学模型的平衡方程,获取姿态参数包括挑高角、贴顶角、前立柱倾角和后立柱倾角的关联姿态参数;
11.b.支架姿态控制过程:
12.b1.根据支架姿态监测过程得到的参数确定的当前的支护姿态;
13.b2.通过面阵激光传感器获取支架上方顶板的轮廓线,并确定顶板的凸起边缘;
14.b3.得到支架顶梁和顶板之间的挑高差,建立挑高差计算数学模型;
15.b4.利用挑高计算数学模型计算液压支架的目标挑高和目标贴顶角;
16.b5.建立目标挑高角计算数学模型,计算确定支架的目标挑高角;
17.b6.将目标挑高角、目标贴顶角参数代入姿态监测数学模型,通过插值算法实现目
标前立柱长度和目标后立柱长度的解算。
18.优选的是,插值算法包括遗传算法和粒子群算法。
19.优选的是,顶板的凸起边缘利用该轮廓线数据并采用canny算子方法确定。
20.优选的是,液压支架的底座布置有九轴倾角传感器,前立柱和后立柱上均布置有隔爆液位传感器,顶梁的两个侧面布置有面阵激光测距传感器。
21.还优选的是,液压支架的基座确定空间姿态角,并确定支架坐标系;前立柱和后立柱的长度实时监测确定。
22.还优选的是,九轴倾角传感器、隔爆液位传感器、面阵激光测距传感器将监测数据传输至控制面板;控制面板内还存储有液压支架的基本参数。
23.还优选的是,液压支架的基本参数包括后连杆基准定位高度、后连杆基准长度、前后连杆上铰点距离、前连杆上铰点与顶梁-掩护梁铰点距离、后立柱上铰点至顶梁-掩护梁铰点距离、前后立柱上铰点距离、前立柱垂向定位距离、后立柱垂向定位距离、前连杆下铰点垂向定位距离、后连杆垂向定位距离、前连杆长度、后立柱下铰点横向定位距离、前后立柱下铰点横向定位距离、前后立柱水平摆角。
24.还优选的是,液压支架的变量姿态参数包括后连杆与水平方向夹角、后连杆与底座之间的夹角、后连杆与掩护梁之间的夹角、掩护梁与竖直方向的夹角、前立柱的长度、后立柱的长度、后连杆和掩护梁连接端与前连杆和底座连接端之间的距离。
25.进一步优选的是,控制面板计算液压支架的支护姿态和顶板轮廓数据参数,输出比例控制信号控制比例电磁换向阀启闭,调整支架姿态。
26.进一步优选的是,控制面板设置的比对阈值,当比对差值大于所述阈值时,控制器输出max控制信号实现支架的快速升架;当比对差值小于所述阈值时,比例控制器输出medium控制信号,降低支架顶梁贴顶时对顶板的冲击效应;max信号和medium信号的幅值根据所选比例换向阀的最大输入信号确定,max信号等于该最大输入信号,medium信号为最大输入信号的一半。
27.本发明提供的一种支撑式液压支架支护姿态监测及控制方法,通过建立不同的数学模型解算确定液压支架的参数,从而确定液压支架的工作姿态,根据对支护环境的监测和计算,确定液压支架的目标支护参数,根据参数可以实施调节,控制液压支架的姿态。利用该监测及控制方法还可以实现液压支架的远程视控,以及远程干预,为智能矿井建设提供了方便。
附图说明
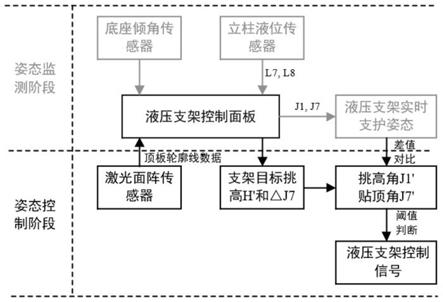
28.图1是支撑式液压支架支护姿态监测及控制方法的流程图;
29.图2是液压直接的结构示意图;
30.图3是支架姿态长度参数示意图;
31.图4是支架姿态角度参数示意图;
32.图5是顶板与支架控制调整原理图;、
33.图6是支架控制调整原理图;
34.图中:1-底座,2-后连杆,3-前连杆,4-掩护梁,5-顶梁,6-前立柱,7-后立柱,8-液位传感器,9-倾角传感器,10-面阵激光传感器,11-顶板轮廓线,12-贴顶轨迹线。
具体实施方式
35.结合图1至图6所示,对本发明提供的一种支撑式液压支架支护姿态监测及控制方法的具体实施方式进行说明。
36.一种支撑式液压支架支护姿态监测及控制方法,如图1所示,具体步骤包括:
37.a.支架姿态监测过程。
38.a1.利用液压支架的立柱液位传感器读取前立柱和后立柱的长度参数。如图3和图4所示,液压支架的基本参数包括后连杆基准定位高度l1、后连杆基准长度l2、前后连杆上铰点距离l3、前连杆上铰点与顶梁-掩护梁铰点距离l4、后立柱上铰点至顶梁-掩护梁铰点距离l5、前后立柱上铰点距离l6、前立柱垂向定位距离l9、后立柱垂向定位距离l10、前连杆下铰点垂向定位距离l10、后连杆垂向定位距离l11、前连杆长度l12、后立柱下铰点横向定位距离l14、前后立柱下铰点横向定位距离l15、前后立柱水平摆角j3。
39.a2.结合支架的长度参数和角度参数关系建立姿态监测数学模型。姿态监测数学模型具体为f(j1,j7)=f(j2,j4,j5,j6,j8,j9,l7,l8,l13)。
[0040][0041]
包含j1,j2,j4,j5,j6,j8,j9,j7,l13九个未知变量及九个平衡方程,借助遗传算法、粒子群算法等插值算法可进行快速求解,即可获取支架当前关键姿态参数挑高角j1和贴顶角j7,以及立柱倾角j8,j9等全系列关联姿态参数。
[0042]
液压支架的变量姿态参数包括后连杆与水平方向夹角为挑高角j1、后连杆与底座之间的夹角j2、后连杆与掩护梁之间的夹角j4、掩护梁与前连杆和底座连接端连线之间的夹角j5、掩护梁与竖直方向的夹角j6、贴顶角j7、前立柱的长度l8、后立柱的长度l7、后连杆和掩护梁连接端与前连杆和底座连接端之间的距离l13。
[0043]
控制器根据液压支架的基本参数和液压支架的变量姿态参数即可确定液压支架的实时姿态,并关联参数变化,进而可以实现液压支架的远程视控。
[0044]
a3.利用插值算法求解姿态监测数学模型的平衡方程,获取姿态参数包括挑高角、贴顶角、前立柱倾角和后立柱倾角的关联姿态参数;其中,插值算法包括遗传算法和粒子群算法等。
[0045]
b.支架姿态控制过程:
[0046]
b1.根据支架姿态监测过程得到的参数确定的当前的支护姿态。
[0047]
b2.通过面阵激光传感器获取支架上方顶板的轮廓线,并确定顶板的凸起边缘;顶板的凸起边缘利用该轮廓线数据并采用canny算子方法确定。
[0048]
b3.得到支架顶梁和顶板之间的挑高差,建立挑高差计算数学模型。挑高差计算数学模型具体是:
[0049][0050]
其中h
′
为目标挑高,h为当前挑高,δh为挑高差;j7
′
为目标贴顶角,δj7贴顶差。l为前后立柱系统的目标长度,x取自然数。
[0051]
b4.利用挑高计算数学模型计算液压支架的目标挑高和目标贴顶角。
[0052]
b5.建立目标挑高角计算数学模型,计算确定支架的目标挑高角。目标挑高角计算数学模型具体为:
[0053][0054]
将液压支架目标挑高h
′
带入上述数学模型即可计算出支架的目标挑高角j1
′
。
[0055]
b6.将目标挑高角、目标贴顶角参数代入姿态监测数学模型,通过插值算法实现目标前立柱长度和目标后立柱长度的解算,其中,插值算法包括遗传算法和粒子群算法等。将目标挑高角、目标贴顶角参数代入姿态监测数学模型中,其包含了l7,l8,j2,j4,j5,j6,j8,j9和l13九个未知量(f(l7,l8)==f(j1,j2,j4,j5,j6,j7,j8,j9,l13)),进而通过各种插值算法可实现对立柱目标长度l7’和l8’的解算。
[0056]
液压支架的底座布置有九轴倾角传感器,型号为维特智能bwt901cl,前立柱和后立柱上均布置有隔爆液位传感器,型号为米朗mtc-3000型,顶梁的两个侧面布置有面阵激光测距传感器,型号为hps-3d160。液压支架的基座确定空间姿态角,并确定支架坐标系;前立柱和后立柱的长度实时监测确定。
[0057]
九轴倾角传感器、隔爆液位传感器、面阵激光测距传感器将监测数据传输至控制面板;控制面板内还存储有液压支架的基本参数。控制面板计算液压支架的支护姿态和顶板轮廓数据参数,输出比例控制信号控制比例电磁换向阀启闭,调整支架姿态。控制器面板读取顶板轮廓数据,计算出液压支架的关键目标姿态目标挑高h’和目标贴顶角j7’,并反算前后立柱系统的目标长度,与液压支架当前立柱长度进行比对,依据比对差值输出比例控制信号控制比例电磁换向阀启闭。控制面板设置的比对阈值,当比对差值大于所述阈值时,控制器输出max控制信号实现支架的快速升架;当比对差值小于所述阈值时,比例控制器输出medium控制信号,降低支架顶梁贴顶时对顶板的冲击效应;max信号和medium信号的幅值根据所选比例换向阀的最大输入信号确定,max信号等于该最大输入信号,medium信号为最大输入信号的一半。
[0058]
该方法通过建立不同的数学模型解算确定液压支架的参数,从而确定液压支架的工作姿态,根据对支护环境的监测和计算,确定液压支架的目标支护参数,根据参数可以实
施调节,控制液压支架的姿态。利用该监测及控制方法还可以实现液压支架的远程视控,以及远程干预,为智能矿井建设提供了方便。
[0059]
当然,上述说明并非是对本发明的限制,本发明也并不仅限于上述举例,本技术领域的技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也应属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
