1.本发明属于雷达数据处理技术领域,具体涉及一种基于深度学习的空空雷达数据仿真方法。
背景技术:
2.在无人机相关产业与技术的研发过程中,需要大量真实的无人机飞行数据参与,以便进行无人机配套系统模块的测试与模拟,诸如无人机飞行路径规划、无人机感知与避撞系统设计以及无人机监督与管控平台等。无人机的飞行数据主要包括无人机的位置数据与速度数据,无人机本机机载的空空雷达便是探测空域中其它无人机飞行数据的主要手段之一。空空雷达为近些年来新兴的机载的探测设备,在飞行过程中,不受空域内入侵机是否为合作机的影响,简单明了的对周围所有的入侵机进行探测,并实时进行入侵机空空雷达数据的传输,便于其余系统取用。
3.绝大多数需要使用无人机飞行数据的系统或平台均会使用空空雷达数据,然而真实的无人机空空雷达数据缺少,且运行场景比较单一,难以满足各大系统测试或模拟的需求。针对于此,无人机的空空雷达数据仿真便可极大的解决这一问题,不仅可以仿真出大量数据,还可以满足例如相遇、汇聚、超越、高度层穿越等各种飞行场景的需求。因此,对于空空雷达的飞行数据仿真便成为无人机相关产业与技术研发过程中至关重要的一步。
4.空空雷达数据探测是由装在一架本机上的一个或多个空空雷达对空域中一架或多架入侵机利用雷达回波所进行的探测过程。空空雷达扫描到入侵机后,便可测量本机a与入侵机b 之间的斜距ρ、方位角θ以及仰角∈,即空空雷达数据。将测量结果传输至航迹处理模块中,经过航迹处理模块进行计算,可以得到入侵机b的飞行数据信息。
5.空空雷达数据的各个参数定义如表1所示:
6.表1空空雷达数据参数
[0007][0008]
因此,对于空空雷达数据而言,数据仿真就是对本机a与入侵机b之间的斜距ρ、方位角θ以及仰角∈进行仿真,仿真数据的精准与否,将影响航迹处理模块中得到的入侵机b的飞行数据的准确程度,进一步会影响诸如感知与避撞系统、航迹规划系统等的测试精度。
[0009]
进行空空雷达数据仿真的前提条件就是本机与入侵机的理想航迹已经规划完成,现有的空空雷达数据仿真技术方案之一便是利用已知的本机与入侵机的理想航迹数据,计算得到理想情况下本机机载空空雷达所测的斜距ρ0、方位角θ0与仰角∈0,计算方法将在后
文中详细说明。在此基础上,添加满足精度要求的白噪声,产生测量误差,进行空空雷达数据的仿真。
[0010]
在minimum operational performance standards(mops)for detect and avoid(daa) systems的指导标准中,提出了一种典型的空空雷达监视效果的仿真建模方法,该模型注入了空空雷达关于入侵机航迹典型的代表性监视误差,对仿真的空空雷达数据的每个指标均使用类似的模型,该模型的偏差从均匀分布中进行一次采样,波动呈现纯高斯分布,具体的模型参数如表2所示。
[0011]
表2空空雷达数据仿真模型偏差
[0012][0013]
除了添加高斯噪声的误差之外,也有使用拉普拉斯分布、马尔可夫分布等模型添加误差,但是归根结底也是从单一的数学角度出发,单纯采用了现有的数学分布模型进行的空空雷达数据仿真。
[0014]
现有空空雷达数据仿真技术仅仅考虑了数学角度的误差模型,该模型可适用于多种数据仿真的场景,具有普适性。但就针对于机载空空雷达数据的仿真而言,对于不同的飞行场景、无人机机型、天气以及无人机飞手的操作等情况,未进行相应的误差模型变化,仿真数据不具备足够的准确度。
[0015]
另外,当仿真数据用于进行无人机飞行航迹预测时,该仿真方法会导致预测航迹与真实航迹出现较大偏差。
技术实现要素:
[0016]
为了解决现有技术关于空空雷达数据仿真的精准度与真实性不足的问题,本发明将对由理想数据添加的误差模型进行改进,将单纯的数学误差模型上,改进为以历史数据为依托的,考虑了实际飞行情况影响因子的误差模型,并以改进后的模型为基础,进行空空雷达数据仿真。
[0017]
本发明以在空空雷达数据仿真中考虑本机机型与状态参数、运行天气以及飞人为因素为核心,故将三大类的影响因素以多因素误差模型的方式在理想的空空雷达数据上进行添加。
[0018]
具体的技术方案为:
[0019]
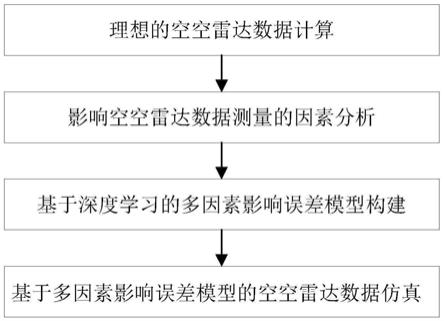
一种基于深度学习的空空雷达数据仿真方法,包括以下步骤:
[0020]
s1、理想的空空雷达数据计算
[0021]
在进行雷达数据仿真之前,本机a以及入侵机b的理想航迹已知,该航迹根据飞行
计划的需求,由规划好的飞行路径、必须通过的控制点、保持的飞行高度以及可飞行的时间等决定。对于本机a以及入侵机b的理想航迹而言,理想航迹包括的参数时间、纬度、经度、高度分别为:
[0022]
本机a:ta、lata、longa、alta;
[0023]
入侵机b:tb、latb、longb、altb;
[0024]
当ta=tb时,表示本机a与入侵机b处于同一个时刻,两机之间的理想航迹数据可以通过以下几个步骤,转换为理想情况下,本机机载空空雷达的测量数据。
[0025]
(1)将本机a的大地坐标转换为本机a的地心坐标(ecef);
[0026]
(2)将入侵机b的大地坐标转换为入侵机b的地心坐标(ecef);
[0027]
(3)入侵机b的地心坐标(ecef)与本机a的地心坐标(ecef))求差,即可得到在地心坐标系下(ecef)入侵机b相对于本机a的位置;
[0028]
(4)将地心坐标系下(ecef)入侵机b相对于本机a的位置转换为在本机enu坐标系中入侵机b的位置;
[0029]
(5)将入侵机b在本机a的enu坐标系中的位置转换为在机体坐标系中的位置;
[0030]
(6)将入侵机b在本机a机体坐标系中的位置转换为本机a的机载空空雷达探测数据。
[0031]
经过以上6个步骤,即可得到理想情况下,本机a的机载空空雷达在ta=tb这一时刻的探测到的入侵机b的空空雷达数据:斜距ρ0、方位角θ0与仰角∈0。
[0032]
s2、影响空空雷达数据测量的因素分析
[0033]
从空空雷达的运行环境角度考虑,因素有以下几个:
[0034]
第1类:本机影响因素f
model
、f
ewv
、f
nsv
、f
vr
、f
δheading
[0035]
模型影响因素f
model
,假设参与运行的无人机机型共有n种,记每一种机型为,假设参与运行的无人机机型共有n种,记每一种机型为
[0036]
选择表征本机飞行状态的参数作为影响因素,考虑本机的飞行速度,包括本机东西向速度f
ewv
和南北向速度f
nsv
,本机的上升下降率f
vr
以及本机航向的变化率f
δheading
。
[0037]
第2类:天气影响因素f
weather
[0038]
将风或气流对本机运行的影响根据其强度进行分类,共分为m类,记每一类风或气流的影响强度为
[0039]
第3类:人为因素f
human
(包括:f
human-o
、f
human-c
、f
human-w
)
[0040]
将无人机飞手的熟练程度根据由生疏到娴熟到资深的变化程度进行分类,熟练程度影响因素f
human-o
分为r类,分别记作
[0041]
将无人机飞手的性格特征根据由沉稳到果断到激进的变化程度进行分类,性格特征影响因素f
human-c
分为k类,分别记作
[0042]
将无人机飞手的工作状态根据由懈怠到懒散到积极的变化程度进行分类,工作状态影响因素f
human-w
分为l类,分别记作
[0043]
s3、基于深度学习的多因素影响误差模型构建
[0044]
对无人机飞行计划系统中直接导出的历史航迹数据进行计算,得到理想情况下,本机机载空空雷达所测得的斜距ρ0、方位角θ0与仰角∈0。在实际飞行的航迹数据中,可以得
到本机机载空空雷达实际所测的斜距ρ1、方位角θ1与仰角∈1。定义空空雷达对入侵机的测量误差δ为理想的测量值δ0与实际的测量值δ1之间的差值,则空空雷达斜距测量误差δρ、方位角测量误差δθ以及仰角测量误差δ∈分别为:
[0045]
δρ=ρ
1-ρ0[0046]
δθ=θ
1-θ0
[0047]
δ∈=∈
1-∈0[0048]
分别建立各个因素对测量误差δ影响的多因素非线性回归模型如下:
[0049][0050]
δθ=ω(f
model
、f
ewv
、f
nsv
、f
vr
、f
δheading
、f
weather
、f
human-o
、f
human-c
、f
human-w
)
[0051]
δ∈=δ(f
model
、f
ewv
、f
nsv
、f
vr
、f
δheading
、f
weather
、f
human-o
、f
human-c
、f
human-w
)
[0052]
来搭建深度学习网络,实现斜距测量误差δρ、方位角测量误差δθ以及仰角测量误差δ∈的多因素非线性回归,实现的步骤如下。
[0053]
第1步:训练与测试数据集
[0054]
给定一系列真实的航迹样本数据集p,其中每一条样本数据{p|p∈p}中均包含了空空雷达对入侵机的测量误差δ值,包括斜距测量误差δρ、方位角测量误差δθ以及仰角测量误差δ∈,以及该情境下各环境影响因素的取值f
model
、f
ewv
、f
nsv
、f
vr
、 f
δheading
、f
weather
、f
human-o
、f
human-c
、f
human-w
。将航迹样本数据集p分为两部分,一部分为训练集p
x
,另一部分为测试集py,尽可能使得训练集p
x
与测试集py具有同等的分布,包含所有的情况。
[0055]
第2步:建立非线性神经网络模型
[0056]
使用sequential模型搭建深度学习网络,可构建四层网络结构,分别为一层全连接层、一层激活层、一层全连接层、一层激活层。其中全连接层是模拟多元线性回归的一个过程,激活层给sequential模型增加了非线性因素,弥补了线性函数表现力不足的问题,最常使用的激活函数为relu函数,其运算量小,收敛快,可最大化的提取出数据特征。可以使用均方差(mse)作为损失函数,观察学习效果。在神经网络模型构建中,可以对模型进行优化,例如可使用随机梯度下降算法(sgd)重新定义其学习率,更快的完成迭代。
[0057]
第3步:对模型进行训练
[0058]
使用训练集p
x
对模型进行训练。
[0059]
第4步:对模型进行验证
[0060]
将第3步的训练结果在测试集py中进行测试,根据测试结果对训练的模型进行评价,若评价结果表明,模型还可继续优化,可增加第3步中的训练的迭代次数,但要注意不能过拟合。
[0061]
s4、基于多因素影响误差模型的空空雷达数据仿真
[0062]
将该情境下各环境影响因素的取值f
model
、f
ewv
、f
nsv
、f
vr
、 f
δheading
、f
weather
、f
human-o
、f
human-c
、f
human-w
一同输入训练后的多因素影响误差模型中,得到在仿真环境约束条件下的空空雷达斜距测量误差δρ、方位角测量误差δθ以及仰角测量误差δ∈。之后将理想航迹中本机机载空空雷达所测得的斜距ρ0、方位角θ0与仰角∈0与对应的测量误差相加,即可得到在实际飞行过程中,本机机载空空雷达实际所测的斜距ρ1、方位角θ1与仰角∈1的仿真值。
[0063]
s5、基于多因素影响误差模型的空空雷达数据仿真技术图
[0064]
将s1-s4中的技术方法进行汇总,即可得到改进后完整的机载空空雷达测量数据
的仿真方法。
[0065]
将飞行计划系统中导出的本机理想飞行航迹数据、入侵机理想飞行航迹数据以及需要仿真的情境下的本机影响因素f
model
、f
ewv
、f
nsv
、f
vr
、f
δheading
、天气影响因素f
weather
、人为因素f
human
三大类数据作为输入,通过航迹计算模块以及多因素影响误差模型模块,即可得到本机机载空空雷达实际所测的斜距ρ1、方位角θ1与仰角∈1的仿真值。
[0066]
本发明提供的一种基于深度学习的空空雷达数据仿真方法:
[0067]
1.本发明方案可以有效提高空空雷达数据与实际运行环境的贴合度,仿真后的数据更加真实可靠。
[0068]
2.在无人机产业研发过程中,使用本发明方案仿真的空空雷达数据,可以有效提高研发产品的精度,提高产品的实际适用性。
[0069]
3.本空空雷达数据仿真技术也可用于实际飞行前的飞行情况预测,可根据飞行条件,提前调整飞行计划。
附图说明
[0070]
图1为本发明的流程示意图;
[0071]
图2为本发明基于多因素影响误差模型的空空雷达数据仿真技术图;
[0072]
图3为本发明多因素影响误差模型构建流程图。
具体实施方式
[0073]
结合实施例说明本发明的具体技术方案。
[0074]
本发明完整的技术方案分为四步,如图1所示,各步骤详细的技术方案:
[0075]
一种基于深度学习的空空雷达数据仿真方法,包括以下步骤:
[0076]
s1、理想的空空雷达数据计算
[0077]
在进行雷达数据仿真之前,本机a以及入侵机b的理想航迹已知,该航迹根据飞行计划的需求,由规划好的飞行路径、必须通过的控制点、保持的飞行高度以及可飞行的时间等决定。对于本机a以及入侵机b的理想航迹而言,理想航迹必须包括的参数如表3所示。
[0078]
表3本机与入侵机的理想航迹数据
[0079][0080][0081]
当ta=tb时,表示本机a与入侵机b处于同一个时刻,两机之间的理想航迹数据可以通过以下几个步骤,转换为理想情况下,本机机载空空雷达的测量数据。
[0082]
(1)将本机a的大地坐标转换为本机a的地心坐标(ecef);
[0083]
(2)将入侵机b的大地坐标转换为入侵机b的地心坐标(ecef);
[0084]
(3)入侵机b的地心坐标(ecef)与本机a的地心坐标(ecef))求差,即可得到在地心坐标系下(ecef)入侵机b相对于本机a的位置;
[0085]
(4)将地心坐标系下(ecef)入侵机b相对于本机a的位置转换为在本机enu坐标系
中入侵机b的位置;
[0086]
(5)将入侵机b在本机a的enu坐标系中的位置转换为在机体坐标系中的位置;
[0087]
(6)将入侵机b在本机a机体坐标系中的位置转换为本机a的机载空空雷达探测数据。
[0088]
经过以上6个步骤,即可得到理想情况下,本机a的机载空空雷达在ta=tb这一时刻的探测到的入侵机b的空空雷达数据:斜距ρ0、方位角θ0与仰角∈0。
[0089]
s2、影响空空雷达数据测量的因素分析
[0090]
为了提高空空雷达数据的准确度,先前的研究者均从改善雷达自身的角度出发,例如修正环境对雷达回波的影响、改进雷达信号的解调方式等,而并未考虑运行环境对空空雷达使用过程中的影响,空空雷达适用的测量范围为6.7nm,方位测量角为左右各110度,俯仰测量角为上下各15度,空空雷达使用环境的变化会对空空雷达数据产生不可忽视的影响。因此,从空空雷达的运行环境角度考虑,可能的影响因素有以下几个:
[0091]
第1类:本机影响因素f
model
、f
ewv
、f
nsv
、f
vr
、f
δheading
[0092]
考虑本机机型对空空雷达使用过程的影响,不同机型的无人机,具有不同的飞行性能,在转弯、爬升下降、飞行高度保持、遭遇颠簸等情况中均有不同的表现,而这不同的表现,会影响本机上的空空雷达对同一目标的测量结果。假设参与运行的无人机机型共有n种,记每一种机型为
[0093]
考虑本机在飞行过程的不同阶段,空空雷达的测量条件不同,因此选择可以表征本机飞行状态的参数作为影响因素,重点考虑本机的飞行速度,包括本机东西向速度f
ewv
和南北向速度f
nsv
,本机的上升下降率f
vr
以及本机航向的变化率f
δheading
。
[0094]
第2类:天气影响因素f
weather
[0095]
天气影响因素,主要是考虑风或气流对本机运行的影响,不同的风或气流会使得本机运行过程中产生颠簸、飞行航向偏移或高度保持困难,可以将风或气流对本机运行的影响根据其强度进行分类,共分为m类,记每一类风或气流的影响强度为影响根据其强度进行分类,共分为m类,记每一类风或气流的影响强度为
[0096]
第3类:人为因素f
human
(包括:f
human-o
、f
human-c
、f
human-w
)
[0097]
不同的无人机飞手具有不同的操作习惯,这种不同的操作习惯由飞手个人的熟练程度、性格特征、工作状态等决定,这些因素会导致飞手在操控同一机型的无人机执飞相同的路线时,本机具有不同的飞行表现。
[0098]
将无人机飞手的熟练程度根据由生疏到娴熟到资深的变化程度进行分类,可以分为r类,分别记作
[0099]
将无人机飞手的性格特征根据由沉稳到果断到激进的变化程度进行分类,可以分为k类,分别记作
[0100]
将无人机飞手的工作状态根据由懈怠到懒散到积极的变化程度进行分类,可以分为l类,分别记作
[0101]
以上三大类影响因素是主要考虑的影响因素,其余可能对空空雷达数据产生的影响因素可以根据实际应用的环境进行适当的补充。
[0102]
s3、基于深度学习的多因素影响误差模型构建
[0103]
对无人机飞行计划系统中直接导出的历史航迹数据进行计算,得到理想情况下,本机机载空空雷达所测得的斜距ρ0、方位角θ0与仰角∈0。在实际飞行的航迹数据中,可以得到本机机载空空雷达实际所测的斜距ρ1、方位角θ1与仰角∈1。我们定义空空雷达对入侵机的测量误差δ为理想的测量值δ0与实际的测量值δ1之间的差值,则空空雷达斜距测量误差δρ、方位角测量误差δθ以及仰角测量误差δ∈分别为:
[0104]
δρ=ρ
1-ρ0[0105]
δθ=θ
1-θ0[0106]
δ∈=∈
1-∈0[0107]
与现有技术的对理想的测量值添加数学误差不同,在实际的运行环境中,上述的各因素均会直接影响空空雷达的测量结果。经过简单的分析不难发现,各因素对斜距测量误差δρ、方位角测量误差δθ以及仰角测量误差δ∈的影响是非线性的,又因为斜距ρ、方位角θ以及仰角∈是一个极坐标系中的定位方式,三个参数之间互不相关,彼此独立,各影响因素均对三个参数产生影响,但影响程度又不尽相同。因此,分别建立各个因素对测量误差δ影响的多因素非线性回归模型如下:
[0108][0109]
δθ=ω(f
model
、f
ewv
、f
nsv
、f
vr
、f
δheading
、f
weather
、f
human-o
、f
human-c
、f
human-w
)
[0110]
δ∈=δ(f
model
、f
ewv
、f
nsv
,、f
vr
、f
δheading
、f
weather
、f
human-o
、f
human-c
、f
human-w
)
[0111]
利用深度学习的方法来求解上式所示的多因素非线性回归模型,深度学习的常用框架有很多,例如keras、tensorflow、mxnet、pytorch、paddlepaddle等,可以使用python语言进行编写。keras作为tensorflow官方推荐的高阶api,十分简洁、易用,因此我们推荐以keras 做为框架,采用sequential模型(在全连接层之间添加激活函数,使得该模型用来拟合非线性数据)来搭建深度学习网络,实现斜距测量误差δρ、方位角测量误差δθ以及仰角测量误差δ∈的多因素非线性回归,实现的步骤如下。
[0112]
第1步:训练与测试数据集
[0113]
给定一系列真实的航迹样本数据集p,其中每一条样本数据{p|p∈p}中均包含了空空雷达对入侵机的测量误差δ值,包括斜距测量误差δρ、方位角测量误差δθ以及仰角测量误差δ∈,以及该情境下各环境影响因素的取值f
model
、f
ewv
、f
nsv
、f
vr
、 f
δheading
、f
weather
、f
human-o
、f
human-c
、f
human-w
。将航迹样本数据集p分为两部分,一部分为训练集p
x
,另一部分为测试集py,尽可能使得训练集p
x
与测试集py具有同等的分布,包含所有的情况。
[0114]
第2步:建立非线性神经网络模型
[0115]
使用sequential模型搭建深度学习网络,可构建四层网络结构,分别为一层全连接层、一层激活层、一层全连接层、一层激活层。其中全连接层是模拟多元线性回归的一个过程,激活层给sequential模型增加了非线性因素,弥补了线性函数表现力不足的问题,最常使用的激活函数为relu函数,其运算量小,收敛快,可最大化的提取出数据特征。可以使用均方差(mse)作为损失函数,观察学习效果。在神经网络模型构建中,可以对模型进行优化,例如可使用随机梯度下降算法(sgd)重新定义其学习率,更快的完成迭代。
[0116]
第3步:对模型进行训练
[0117]
使用训练集p
x
对模型进行训练。
[0118]
第4步:对模型进行验证
[0119]
将第3步的训练结果在测试集py中进行测试,根据测试结果对训练的模型进行评价,若评价结果表明,模型还可继续优化,可增加第3步中的训练的迭代次数,但要注意不能过拟合。
[0120]
经过以上步骤,即可得到基于多因素影响的误差模型,其中深度学习只是达到由历史航迹数据和历史的多影响因素共同得到空空雷达数据测量的多因素影响误差模型的工具,改用其它合适的深度学习手段依然可达到相应的目的。
[0121]
s4、基于多因素影响误差模型的空空雷达数据仿真
[0122]
将该情境下各环境影响因素的取值f
model
、f
ewv
、f
nsv
、f
vr
、 f
δheading
、f
weather
、f
human-o
、f
human-c
、f
human-w
一同输入训练后的多因素影响误差模型中,得到在仿真环境约束条件下的空空雷达斜距测量误差δρ、方位角测量误差δθ以及仰角测量误差δ∈。之后将理想航迹中本机机载空空雷达所测得的斜距ρ0、方位角θ0与仰角∈0与对应的测量误差相加,即可得到在实际飞行过程中,本机机载空空雷达实际所测的斜距ρ1、方位角θ1与仰角∈1的仿真值。
[0123]
s5、基于多因素影响误差模型的空空雷达数据仿真技术图
[0124]
将s1-s4中的技术方法进行汇总,即可得到改进后完整的机载空空雷达测量数据的仿真方法,其技术路线图如图2所示。
[0125]
由图2可以看出,将飞行计划系统中导出的本机理想飞行航迹数据、入侵机理想飞行航迹数据以及需要仿真的情境下的本机影响因素f
model
、f
ewv
、f
nsv
、f
vr
、f
δheading
、天气影响因素f
weather
、人为因素f
human
三大类数据作为输入,通过航迹计算模块以及多因素影响误差模型模块,即可得到本机机载空空雷达实际所测的斜距ρ1、方位角θ1与仰角∈1的仿真值。
[0126]
其中,多因素影响误差模型是通过历史数据的深度学习,通过不断训练学习得出,其构建的流程图如图3所示。是将历史数据分为训练集与测试集两个部分,由训练集通过不断学习得出可能的误差模型,输入测试集进行测试,不断循环,最终得到符合要求的多因素影响误差模型。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。