1.按键切换竖扶手杆可摇摆或固定的单杠式摇杆跑步机,属于健身器械领域,具体涉及到一种按键切换竖扶手杆可摇摆或固定的单杠式摇杆跑步机。
背景技术:
2.本技术人于2021年07月08日在基于本人已经被授权的“竖扶手可摇摆运动的电动跑步机的健身方法”(专利号2018102342730)发明专利的基础上补充申报了“单杠式摇杆跑步机”的实用新型(专利号202121577177x)。
3.但后来,本技术人又发现,在该实用新型中采用的“由左插销(29)、左插销孔(31)和左插销孔杆(33)构成的左切换构件及由右插销(30)、右插销孔(32)和右插销孔杆(34)构成的右切换构件”的机械式切换构件的技术方案结构繁琐、操作不便、增加了产品成本且影响了产品外观,故补充了本实用新型。
技术实现要素:
4.本实用新型要解决的技术问题是:克服现有单杠式摇杆跑步机的不足,提供了一种结构简单、操作简便、降低成本、可以便捷地调节摇杆阻力大小、可以按键操作简单快速且安全地电动切换竖扶手杆的可摇摆状态或固定状态、在把竖扶手杆和高扶手杆固定住后可以进行单杠运动、运动者双脚不会踩出跑步机的跑带外踩到跑台架上进而保证了运动者的安全的按键切换竖扶手杆可摇摆或固定的单杠式摇杆跑步机。
5.本实用新型的按键切换竖扶手杆可摇摆或固定的单杠式摇杆跑步机,是通过如下的技术方案来实现上述目的的,包括:由左底架(1)、右底架(2)、左前支架(3)、右前支架(4)、左横扶手(5)、右横扶手(6)、左后支架(7)、右后支架(8)、左跑步台架(9)、右跑步台架(10)、跑带(11)和控制系统(12)组成的,且在通电的情况下通过点击控制系统(12)的控制台(121)上预设的开始键(122)控制静止不动的跑带(11)运转起来,且通过点击控制系统(12)的控制台(121)上预设的停止键(123)控制运转中的跑带(11)停止运转,且左底架(1)与右底架(2)之间、左前支架(3)与右前支架(4)之间用n根连接杆连接固定使整机机架坚固的电动跑步机,其特征是:还设置有左竖扶手杆套管(13)、右竖扶手杆套管(14)、左竖扶手杆(15)、右竖扶手杆(16)、左高扶手杆(17)、右高扶手杆(18)、左轴承(19)、右轴承(20)、左拉簧上固定处(21)、右拉簧上固定处(22)、左升降机(23)、右升降机(24)、左拉簧下固定处(25)、右拉簧下固定处(26)、左拉簧(27)、右拉簧(28)、可进行左竖扶手杆套管(13)可摇摆与固定之间电动切换的左电控切换构件、可进行右竖扶手杆套管(14)可摇摆与固定之间电动切换的右电控切换构件、左固定键(29)、右固定键(30)、左摇摆键(31)、右摇摆键(32),其中:所述左横扶手(5)上配置有一根左竖扶手杆套管(13),左竖扶手杆套管(13)上段里面或外面套装着可升降可固定的左竖扶手杆(15)、左竖扶手杆(15)的顶端一体成型设置有左高扶手杆(17),左竖扶手杆套管(13)中段与左横扶手(5)之间通过左轴承(19)连接,左竖扶手杆套管(13)可以左轴承(19)为支点做前后摇摆运动,此时左竖扶手杆(15)和左高扶手杆
(17)会做出与左竖扶手杆套管(13)下段相反方向的摇摆运动,
6.所述左竖扶手杆套管(13)的底端设置有左拉簧上固定处(21),左底架(1)上在左竖扶手杆套管(13)处于垂直状态时的左拉簧上固定处(21)垂直对到的位置固定设有左升降机(23),左升降机(23)顶端设有左拉簧下固定处(25),左拉簧(27)上端固定在左拉簧上固定处(21)上,左拉簧(27)下端固定在左拉簧下固定处(25)上,通过调整左升降机(23)的顶端高度可以伸缩左拉簧(27)进而调节左竖扶手杆套管(13)和左竖扶手杆(15)和左高扶手杆(17)前后摇摆运动时的运动阻力,在初始状态时,左拉簧(27)让左竖扶手杆套管(13)和左竖扶手杆(15)保持垂直、并使左高扶手杆(17)保持水平,
7.所述可进行左竖扶手杆套管(13)可摇摆与固定之间电动切换的左电控切换构件用于电动切换左竖扶手杆套管(13)的可摇摆状态和固定状态,左电控切换构件与控制系统(12)电性连接,在控制系统(12)控制断电中的左电控切换构件通电时会把固定中的左竖扶手杆套管(13)切换到可摇摆状态进而使左竖扶手杆(15)和左高扶手杆(17)也可摇摆,在控制系统(12)控制通电中的左电控切换构件断电时会把可摇摆且处于垂直状态的左竖扶手杆套管(13)切换到固定状态进而把左竖扶手杆(15)和左高扶手杆(17)也都固定住,
8.所述左固定键(29)和左摇摆键(31)各自与控制系统(12)连接,所述左固定键(29)和左摇摆键(31)设在控制系统(12)的控制台(121)左侧上,在左竖扶手杆套管(13)可摇摆状态下点击左固定键(29)时,控制系统(12)控制左电控切换构件断电,在左竖扶手杆套管(13)固定状态下点击左摇摆键(31)时,控制系统(12)控制左电控切换构件通电,
9.左右对称的,
10.所述右横扶手(6)上配置有一根右竖扶手杆套管(14),右竖扶手杆套管(14)上段里面或外面套装着可升降可固定的右竖扶手杆(16)、右竖扶手杆(16)的顶端一体成型设置有右高扶手杆(18),右竖扶手杆套管(14)中段与右横扶手(6)之间通过右轴承(20)连接,右竖扶手杆套管(14)可以右轴承(20)为支点做前后摇摆运动,此时右竖扶手杆(16)和右高扶手杆(18)会做出与右竖扶手杆套管(14)下段相反方向的摇摆运动,
11.所述右竖扶手杆套管(14)的底端设置有右拉簧上固定处(22),右底架(2)上在右竖扶手杆套管(14)处于垂直状态时的右拉簧上固定处(22)垂直对到的位置固定设有右升降机(24),右升降机(24)顶端设有右拉簧下固定处(26),右拉簧(28)上端固定在右拉簧上固定处(22)上,右拉簧(28)下端固定在右拉簧下固定处(26)上,通过调整右升降机(24)的顶端高度可以伸缩右拉簧(28)进而调节右竖扶手杆套管(14)和右竖扶手杆(16)和右高扶手杆(18)前后摇摆运动时的运动阻力,在初始状态时,右拉簧(28)让右竖扶手杆套管(14)和右竖扶手杆(16)保持垂直、并使右高扶手杆(18)保持水平,
12.所述可进行右竖扶手杆套管(14)可摇摆与固定之间电动切换的右电控切换构件用于电动切换右竖扶手杆套管(14)的可摇摆状态和固定状态,右电控切换构件与控制系统(12)电性连接,在控制系统(12)控制断电中的右电控切换构件通电时会把固定中的右竖扶手杆套管(14)切换到可摇摆状态进而使右竖扶手杆(16)和右高扶手杆(18)也可摇摆,在控制系统(12)控制通电中的右电控切换构件断电时会把可摇摆且处于垂直状态的右竖扶手杆套管(14)切换到固定状态进而把右竖扶手杆(16)和右高扶手杆(18)也都固定住,
13.所述右固定键(30)和右摇摆键(32)各自与控制系统(12)连接,所述右固定键(30)和右摇摆键(32)设在控制系统(12)的控制台(121)右侧上,在右竖扶手杆套管(14)可摇摆
状态下点击右固定键(30)时,控制系统(12)控制右电控切换构件断电,在右竖扶手杆套管(14)固定状态下点击右摇摆键(32)时,控制系统(12)控制右电控切换构件通电。
14.所述可进行左竖扶手杆套管(13)可摇摆与固定之间电动切换的左电控切换构件由左电插锁(33)和左锁孔(35)及左横扶手(5)或左锁孔杆(37)构成;所述可进行右竖扶手杆套管(14)可摇摆与固定之间电动切换的右电控切换构件由右电插锁(34)和右锁孔(36)及右横扶手(6)或右锁孔杆(38)构成,其中:
15.所述左竖扶手杆套管(13)外侧上设有锁舌伸缩方向平行于左竖扶手杆套管(13)的左电插锁(33),所述左电插锁(33)为通电时锁舌缩回锁体内、断电时锁舌伸出锁体外的电插锁,所述左电插锁(33)与控制系统(12)连接、且由控制系统(12)控制其通电或断电,在左竖扶手杆套管(13)前后摇摆时处于开锁状态的左电插锁(33)跟随摇摆,
16.初始垂直状态下的左竖扶手杆套管(13)上的左电插锁(33)的锁舌轴向对应位置的左横扶手(5)上设有左锁孔(35),左电插锁(33)与左锁孔(35)组合用于切换左竖扶手杆套管(13)和左竖扶手杆(15)和左高扶手杆(17)的可摇摆状态或固定状态,左电插锁(33)在通电时即其锁舌缩在锁体内时左竖扶手杆套管(13)和左竖扶手杆(15)和左高扶手杆(17)可以左轴承(19)为支点做前后摇摆运动,初始垂直状态的左竖扶手杆套管(13)上的左电插锁(33)在断电时即左电插锁(33)的锁舌伸出时可恰好严丝合缝地插入左锁孔(35)中把初垂直始状态的左竖扶手杆套管(13)固定住,进而把左竖扶手杆(15)和左高扶手杆(17)都固定住,
17.或,所述左锁孔(35)设在加设在左前支架(3)中上段与左后支架(7)中上段之间的对应于初始状态的左电插锁(33)的锁舌伸出位置的左锁孔杆(37)上,此时,所述左锁孔杆(37)还用于增加整机的坚固度,在左竖扶手杆套管(13)处于初始垂直状态时或在其做前后摇摆运动时左锁孔杆(37)与左竖扶手杆套管(13)和或左升降机(23)和或左拉簧(27)都不触碰,
18.左右对称的,
19.所述右竖扶手杆套管(14)外侧上设有锁舌伸缩方向平行于右竖扶手杆套管(14)的右电插锁(34),所述右电插锁(34)为通电时锁舌缩回锁体内、断电时锁舌伸出锁体外的电插锁,所述右电插锁(34)与控制系统(12)连接、且由控制系统(12)控制其通电或断电,在右竖扶手杆套管(14)前后摇摆时处于开锁状态的右电插锁(34)跟随摇摆,
20.初始垂直状态下的右竖扶手杆套管(14)上的右电插锁(34)的锁舌轴向对应位置的右横扶手(6)上设有右锁孔(36),右电插锁(34)与右锁孔(36)组合用于切换右竖扶手杆套管(14)和右竖扶手杆(16)和右高扶手杆(18)的可摇摆状态或固定状态,右电插锁(34)在通电时即其锁舌缩在锁体内时右竖扶手杆套管(14)和右竖扶手杆(16)和右高扶手杆(18)可以右轴承(20)为支点做前后摇摆运动,初始垂直状态的右竖扶手杆套管(14)上的右电插锁(34)在断电时即右电插锁(34)的锁舌伸出时可恰好严丝合缝地插入右锁孔(36)中把初始垂直状态的左竖扶手杆套管(13)固定住,进而把右竖扶手杆(16)和右高扶手杆(18)都固定住,
21.或,所述右锁孔(36)设在加设在右前支架(4)中上段与右后支架(8)中上段之间的对应于初始状态的右电插锁(34)的锁舌伸出位置的右锁孔杆(38)上,此时,所述右锁孔杆(38)还用于增加整机的坚固度,在右竖扶手杆套管(14)处于初始垂直状态时或在其做前后
摇摆运动时右锁孔杆(38)与右竖扶手杆套管(14)和或右升降机(24)和或右拉簧(28)都不触碰。
22.所述控制系统(12)内还设有运动人体安防程序,所述运动人体安防程序的具体设置为:
23.在点击开始键(122)控制静止不动的跑带(11)运转后,控制系统(12)不执行左固定键(29)、右固定键(30)、左摇摆键(31)和或右摇摆键(32)发出的可摇摆或固定的指令,以预防锻炼者一边在运转中的跑带(11)上进行跑步或走路运动一边进行切换左竖扶手杆(15)和左高扶手杆(17)及右竖扶手杆(16)和右高扶手杆(18)的可摇摆或固定时带来安全隐患,
24.在点击停止键(123)控制运转中的跑带(11)停止运转后延时5-10秒钟,控制系统(12)执行左固定键(29)、右固定键(30)、左摇摆键(31)和或右摇摆键(32)发出的可摇摆或固定的指令,即在跑带(11)静止不动时才能切换左竖扶手杆(15)和左高扶手杆(17)及右竖扶手杆(16)和右高扶手杆(18)的可摇摆或固定。
25.所述左竖扶手杆套管(13)上或左电控切换构件内设有左竖杆检测模块(39)、所述右竖扶手杆套管(14)上或右电控切换构件内设有右竖杆检测模块(40),所述左竖杆检测模块(39)和右竖杆检测模块(40)各自与控制系统(12)连接,其中:
26.所述左竖杆检测模块(39)用于检测左竖扶手杆套管(13)是否已经垂直且已经静止不动、并将检测信息反馈给控制系统(12),当检测到左竖扶手杆套管(13)已经垂直且已经静止不动时,控制系统(12)执行左固定键(29)或左摇摆键(31)发出的可摇摆或固定的指令,当检测到左竖扶手杆套管(13)没有垂直或没有静止不动时,控制系统(12)不执行左固定键(29)或左摇摆键(31)发出的可摇摆或固定的指令,这样就可以预防左竖扶手杆套管(13)在还没有垂直且静止不动时左电控切换构件就进行可摇摆或固定的切换操作损坏本机,
27.所述右竖杆检测模块(40)用于检测右竖扶手杆套管(14)是否已经垂直且已经静止不动、并将检测信息反馈给控制系统(12),当检测到右竖扶手杆套管(14)已经垂直且已经静止不动时,控制系统(12)执行右固定键(30)或右摇摆键(32)发出的可摇摆或固定的指令,当检测到右竖扶手杆套管(14)没有垂直或没有静止不动时,控制系统(12)不执行右固定键(30)或右摇摆键(32)发出的可摇摆或固定的指令,这样就可以预防右竖扶手杆套管(14)在还没有垂直且静止不动时右电控切换构件就进行可摇摆或固定的切换操作损坏本机。
28.所述左电控切换构件内设有左手动切换模块(41)、左手动切换模块(41)用于在控制系统(12)没电时可以手动切换左竖扶手杆套管(13)和左竖扶手杆(15)和左高扶手杆(17)的可摇摆或固定,所述右电控切换构件内设有右手动切换模块(42)、右手动切换模块(42)用于在控制系统(12)没电时可以手动切换右竖扶手杆套管(14)和右竖扶手杆(16)和右高扶手杆(18)的可摇摆或固定,
29.且,在控制系统(12)有电时,控制系统(12)控制左手动切换模块(41)和右手动切换模块(42)无法启动,即在控制系统(12)有电时左手动切换模块(41)和右手动切换模块(42)处于无效状态。
30.所述左固定键(29)和右固定键(30)可合二为一成总固定键,在点击总固定键时,
控制系统(12)控制左电控切换构件和右电控切换构件同时断电;所述左摇摆键(31)和右摇摆键(32)可合二为一成总摇摆键,在点击总摇摆键时,控制系统(12)控制左电控切换构件和右电控切换构件同时通电;
31.所述左手动切换模块(41)的手动控制把手和右手动切换模块(42)的手动控制把手可分别通过一拖二闸线连接到设在控制台(121)上的总控制把手上,通过总控制把手同时手动切换左竖扶手杆套管(13)和左竖扶手杆(15)和左高扶手杆(17)的可摇摆或固定及右竖扶手杆套管(14)和右竖扶手杆(16)和右高扶手杆(18)的可摇摆或固定。
32.所述左锁孔杆(37)与左底架(1)和或左前支架(3)和或左横扶手(5)和或左后支架(7)之间通过n个左支架(43)连接固定,以利于整机的坚固,所述右锁孔杆(38)与右底架(2)和或右前支架(4)和或右横扶手(6)和或右后支架(8)之间通过n个右支架(44)连接固定,以利于整机的坚固;和或,所述左底架(1)与左横扶手(5)之间可以加装左支架(43),以利于整机的坚固,所述右底架(2)与右横扶手(6)之间可以加装右支架(44),以利于整机的坚固;所述与左锁孔杆(37)连接的左支架(43)和与右锁孔杆(38)连接的右支架(44)还作为限位器使用,用以分别限制左竖扶手杆套管(13)和右竖扶手杆套管(14)的最大摇摆幅度、进而限定左竖扶手杆(15)和左高扶手杆(17)及右竖扶手杆(16)和右高扶手杆(18)的最大摇摆幅度,此时,朝向左竖扶手杆套管(13)一边的左支架(43)和朝向右竖扶手杆套管(14)一边的右支架(44)上各自设有减震器以防止左竖扶手杆套管(13)与左支架(43)之间及右竖扶手杆套管(14)与右支架(44)之间的强烈碰撞。
33.还可以设置左遮挡罩(45)和右遮挡罩(46),其中,左遮挡罩(45)设在左底架(1)和或左跑步台架(9)上、其右壁恰好遮挡住左跑步台架(9)的右侧边,并遮挡住左底架(1)、左前支架(3)、左横扶手(5)、左后支架(7)及左跑步台架(9)之间区域,且不会影响左竖扶手杆套管(13)的摇摆和左升降机(23)的升降及左电插锁(33)的摇摆或开锁或锁定;
34.左右对称的,右遮挡罩(46)设在右底架(2)和或右跑步台架(10)上、其左壁恰好遮挡住右跑步台架(10)的左侧边,并遮挡住右底架(2)、右前支架(4)、右横扶手(6)、右后支架(8)及右跑步台架(10)之间区域,且不会影响右竖扶手杆套管(14)的摇摆和右升降机(24)的升降及右电插锁(34)的摇摆或开锁或锁定。
35.还可以设有安全带左前固定处(47)、安全带右前固定处(48)、安全带左后固定处(49)、安全带右后固定处(50)和安全裤(51),其中,所述左横扶手(5)前端和或左遮挡罩(45)前端上端上设有安全带左前固定处(47)、所述左横扶手(5)后端和或左遮挡罩(45)后端上端上设有安全带左后固定处(49);左右对称的,所述右横扶手(6)前端和或右遮挡罩(46)前端上端上设有安全带右前固定处(48)、所述右横扶手(6)后端和或右遮挡罩(46)后端上端上设有安全带右后固定处(50),所述安全裤(51)用于穿着在运动者身上,所述安全裤(51)上平均间距设有四根安全带,四根安全带分别连接到安全带左前固定处(47)、安全带右前固定处(48)、安全带左后固定处(49)和安全带右后固定处(50)上。
36.所述左升降机(23)和右升降机(24)是机械式升降机或液压式升降机或气压式升降机或电动升降机,其高度调节是手动的或电动或自动感应控制的;和或,所述左升降机(23)和右升降机(24)首选手摇式剪式升降机,此时所述左升降机(23)和右升降机(24)上的调节杆各自穿出于左前支架(3)或左后支架(7)和左遮挡罩(45)及右前支架(4)或右后支架(8)和右遮挡罩(46)上对应位置上的预先设置的匹配于左升降机(23)和右升降机(24)上的
调节杆的粗细和摇摆范围的左通孔(t1)和右通孔(t2),通过操作露出于通孔外的调节杆手柄可各自调节左升降机(23)和右升降机(24)的顶端高度进而调节左拉簧(27)和右拉簧(28)的阻力强度;和或,左通孔(t1)和右通孔(t2)边上各自设有阻力度刻度表、用于对应显示调节杆在某一位置时其具体的阻力是多少或在某一区间;和或,左通孔(t1)和右通孔(t2)外各自配置有弹性伸缩护套用以防止灰尘进入相应遮挡罩内;和或,所述控制系统(12)还包括信息存储及处理模块,信息存储及处理系统用于输入、存储、处理和指向n个不同锻炼者的身体资料和运动资料,并安排合理的运动方式、运动时间、运动速度、运动幅度和或运动强度;和或,所述控制系统(12)预先设置有运动程序,并可根据存储的、并随时进行补充的锻炼者身体资料和运动资料安排不同锻炼者的个性化运动程序;和或,通过点击控制系统(12)上预设的跑带进退开关可以把跑带(11)的运行方向调整为向前进或向后退;和或,所述左高扶手杆(17)和右高扶手杆(18)的高度调节是人工的或电动的或自动检测感应控制的;和或,所述左高扶手杆(17)和右高扶手杆(18)可调整前后左右四个朝向;和或,所述左竖扶手杆套管(13)与左竖扶手杆(15)之间及右竖扶手杆套管(14)与右竖扶手杆(16)之间设有高度刻度表,用以分别确定左高扶手杆(17)及右高扶手杆(18)的具体高度;和或,所述左横扶手(5)和或右横扶手(6)和或左竖扶手杆(15)或和右竖扶手杆(16)和或左高扶手杆(17)和或右高扶手杆(18)上全部或单独配置有心率传感器、用于实时检测运动者心率、并在心率超出预设心率范围时控制系统(12)控制跑带(11)停止运转并发出警报;和或,所述左底架(1)、右底架(2)、左前支架(3)、右前支架(4)、左横扶手(5)、右横扶手(6)、左后支架(7)、右后支架(8)、左跑步台架(9)、右跑步台架(10)、控制台(121)、左遮挡罩(45)和或右遮挡罩(46)上可配置扭腰器、俯卧撑架、压腿器、哑铃、仰卧起坐器、拉力器、拉力带、电动按摩器、脚步影像仪、双杠器、腰背按摩器、太极揉推器、伸背架、臂力大转轮、上肢牵引器、颈椎锻炼器、空气净化器、臭氧发生机、软性扶手、虚拟现实设备及运动性、康复性或防护性辅助器械;和或,四根安全带可拆装;和或,所述左跑步台架(9)与右跑步台架(10)前段上方之间设有紧急安全绳,紧急安全绳连接到控制台(121)上预设的紧急开关,用于当锻炼者脚步太靠近跑带(11)前端和跑带(11)后端时人体会拉扯紧急安全绳以触发紧急开关使所述电动跑步机紧急停机进而保护锻炼者安全;和或,所述左电控切换构件和右电控切换构件在每次电动切换时控制系统(12)都通过预设的声光系统发出语音和或灯光提醒,以使锻炼者有身心准备;和或,还可设置左滚轮架、右滚轮架、左滚轮、右滚轮,所述左滚轮架设置在左竖扶手杆套管(13)的下端,左滚轮通过滚轮轴固定在左滚轮架上,此时左拉簧上固定处(21)设置在左滚轮架的底端上,所述左锁孔杆(37)悬空穿过左滚轮架内,左锁孔杆(37)是曲线型的,其上沿曲线与左滚轮下沿以左轴承(19)为支点滚动产生的曲线完全吻合,左锁孔杆(37)上沿支撑起左滚轮下沿,在左竖扶手杆套管(13)和左竖扶手杆(15)和左高扶手杆(17)摇摆运动时左滚轮在左锁孔杆(37)上跟随滚动,这时,左锁孔杆(37)不仅是导向轨,而且还是承重杆、用于增加左高扶手杆(17)的承载力,左右对称的,所述右滚轮架设置在右竖扶手杆套管(14)的下端,右滚轮通过滚轮轴固定在右滚轮架上,此时右拉簧上固定处(22)设置在右滚轮架的底端上,所述右锁孔杆(38)悬空穿过右滚轮架内,右锁孔杆(38)是曲线型的,其上沿曲线与右滚轮下沿以右轴承(20)为支点滚动产生的曲线完全吻合,右锁孔杆(38)上沿支撑起右滚轮下沿,在右竖扶手杆套管(14)和右竖扶手杆(16)和右高扶手杆(18)摇摆运动时右滚轮在右锁孔杆(38)上跟随滚动,这时,右锁孔杆(38)不仅是
导向轨,而且还是承重杆、用于增加右高扶手杆(18)的承载力。
37.与现有技术相比,本实用新型按键切换竖扶手杆可摇摆或固定的单杠式摇杆跑步机的有益效果是:
38.结构简单、操作简便、降低成本、可以便捷地调节摇杆阻力大小、可以按键操作简单快速且安全地电动切换竖扶手杆的可摇摆状态或固定状态、在把竖扶手杆和高扶手杆固定住后可以进行单杠运动、运动者双脚不会踩出跑步机的跑带外踩到跑台架上进而保证了运动者的安全。
附图说明
39.图1为现有的常见跑步机示意图。
40.图2为现有的常见跑步机的机架结构示意图——图1和图2的这种跑步机设置是现有跑步机的常见设置、故不再赘述。
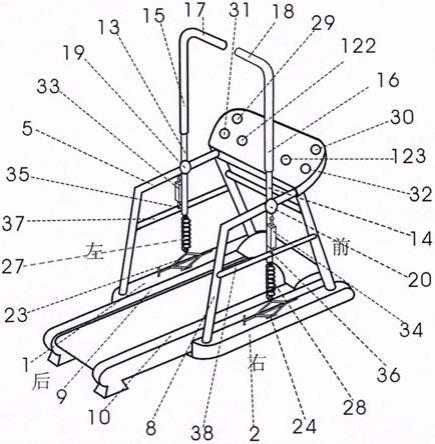
41.图3为本实用新型在常见跑步机上配置了左竖扶手杆套管(13)、右竖扶手杆套管(14)、左竖扶手杆(15)、右竖扶手杆(16)、左高扶手杆(17)、右高扶手杆(18)、左轴承(19)、右轴承(20)、左升降机(23)、右升降机(24)、左拉簧(27)、右拉簧(28)、左固定键(29)、右固定键(30)、左摇摆键(31)、右摇摆键(32)、左电插锁(33)、右电插锁(34)、左锁孔(35)、右锁孔(36),且左锁孔(35)设在左横扶手(5)上、右锁孔(36)设在右横扶手(6)上时示意图——特别说明,本实施例的左升降机(23)和右升降机(24)采用了手摇式剪式升降机,在实施例中,通过摇动手摇式剪式升降机上的调节杆上的手柄(详见图19)可以达到调节左升降机(23)和右升降机(24)的顶端高度进而调节左拉簧(27)和右拉簧(28)强度的目的。
42.图4为本实用新型在常见跑步机上配置了左竖扶手杆套管(13)、右竖扶手杆套管(14)、左竖扶手杆(15)、右竖扶手杆(16)、左高扶手杆(17)、右高扶手杆(18)、左轴承(19)、右轴承(20)、左升降机(23)、右升降机(24)、左拉簧(27)、右拉簧(28)、左固定键(29)、右固定键(30)、左摇摆键(31)、右摇摆键(32)、左电插锁(33)、右电插锁(34)、左锁孔(35)、右锁孔(36),且左锁孔(35)设在左锁孔杆(37)上、右锁孔(36)设在右锁孔杆(38)上时示意图(与图3相比,这二种设置各有好处,图3结构的好处为:简单直观,节约了插销孔杆,图3结构的坏处为:由于本机需要给人进行单杠运动用,按图3的结构时由于力臂短了,这样就会大大增加锁舌的竖向受力和侧向受力,也就是说电插锁容易损坏、或需要更大的锁舌进而需要更粗的横扶手,得不偿失;而且,电插锁设于横扶手上面这段的竖扶手杆套管外时,会影响竖扶手下端和横扶手的功效;而且,影响产品的美观度;再者,露出的电插锁会影响锻炼者及旁人的人身安全。图4的结构的好坏处刚好与图3相反。结论是:不建议把锁孔设在横扶手上,应该把锁孔设在锁孔杆上)。
43.图5为本实用新型图4时左电插锁(33)的锁舌插进左锁孔(35)中进行锁定及右电插锁(34)的锁舌插进右锁孔(36)中进行锁定后结构示意图(此时左竖扶手杆套管(13)和右竖扶手杆套管(14)都已经被固定住,进而也固定住了左竖扶手杆(15)和左高扶手杆(17)及右竖扶手杆(16)和右高扶手杆(18),从而使本机成为一台固定竖扶手电动跑步机,此时运动者可以进行单杠运动或悬挂运动或抓住固定竖扶手杆和高扶手杆的跑步或走路运动)。
44.图6为本实用新型左底架(1)、左竖扶手杆套管(13)、左拉簧上固定处(21)、左升降机(23)与左拉簧下固定处(25)之间,及右底架(2)、右竖扶手杆套管(14)、右拉簧上固定处
(22)、右升降机(24)与右拉簧下固定处(26)之间结构关系后视图。
45.图7为本实用新型左底架(1)、左竖扶手杆套管(13)、左拉簧上固定处(21)、左升降机(23)与左拉簧下固定处(25)之间结构关系左视图。
46.图8为本实用新型在图7基础上配置了左拉簧(27)后结构关系左视图。
47.图9为本实用新型在图8时左升降机(23)顶端下降后结构关系左视图(此时左拉簧(27)已经拉长,故其阻力强度相对图8时加强了)。
48.图10为本实用新型左电插锁(33)通电时左电插锁(33)、左锁孔(35)、左锁孔杆(37)及左手动切换模块(41)之间关系左视图。
49.图11为本实用新型在图10时左电插锁(33)断电时左电插锁(33)、左锁孔(35)、左锁孔杆(37)及左手动切换模块(41)之间关系左视图(注:为了节约用电电动跑步机平时不用时都会关闭电源的、且由于初始状态时左竖扶手杆套管(13)和右竖扶手杆套管(14)都处于垂直状态,所以此时左电插锁(33)的锁舌必定插在左锁孔(35)中、右电插锁(34)的锁舌必定插在右锁孔(36)中,也就是说本机在初始状态下就是一台单杠式跑步机)。
50.图12为本实用新型左锁孔(35)或右锁孔(36)的另一种设置结构,在此结构中,左锁孔(35)或右锁孔(36)并不直接设置在左锁孔杆(37)或右锁孔杆(38)上,而是在左锁孔杆(37)或右锁孔杆(38)下端焊接或一体成型有一块宽度大于左锁孔杆(37)或右锁孔杆(38)直径的金属板,左锁孔(35)或右锁孔(36)一边一个设在左锁孔杆(37)或右锁孔杆(38)左右二侧的金属板上,同时,左电插锁(33)的锁舌或右电插锁(34)的锁舌也一分为二对应于左锁孔(35)或右锁孔(36)。这种设置结构的好处是:避免了直接在左锁孔杆(37)或右锁孔杆(38)上开孔会对左锁孔杆(37)或右锁孔杆(38)坚固度的影响。
51.图13为本实用新型在图12基础上左电插锁(33)的锁舌或右电插锁(34)的锁舌已经插入左锁孔或右锁孔(由于被遮挡了图中皆未标出)时示意图。
52.图14为本实用新型控制系统(12)与左竖扶手杆套管(13)、左轴承(19)、左拉簧上固定处(21)、左电插锁(33)、左锁孔(35)、左锁孔杆(37)、左竖杆检测模块(39)和左手动切换模块(41)之间关系及控制系统(12)与右竖扶手杆套管(14)、右轴承(20)、右拉簧上固定处(22)、右电插锁(34)、右锁孔(36)、右锁孔杆(38)、右竖杆检测模块(40)和右手动切换模块(42)之间关系,且左电插锁(33)和右电插锁(34)都已经通电时后视示意图。
53.图15为本实用新型在图14基础上左电插锁(33)和右电插锁(34)都已经断电时后视示意图。
54.图16为本实用新型图5基础上左锁孔杆(37)与左前支架(3)、左横扶手(5)、左后支架(7)之间通过左支架(43)连接固定,及右锁孔杆(38)与右前支架(4)、右横扶手(6)、右后支架(8)之间通过右支架(44)连接固定后示意图(此时,左支架(43)限制住了左竖扶手杆套管(13)的最大摇摆幅度,右支架(44)限制住了右竖扶手杆套管(14)的最大摇摆幅度,这样当锻炼者的速度跟不上跑带(11)的速度时,只要锻炼者能抓住竖扶手杆或高扶手杆就不会摔倒在地了)。
55.图17为本实用新型在图16基础上配置了左遮挡罩(45)和右遮挡罩(46)后、且左高扶手杆(17)和右高扶手杆(18)都调整为朝后时示意图(高扶手朝后的好处有:一来运动时不会碰到头部;二来在单杠运动时其对应锁孔杆的受力方向是轴向所以可以承受更大的受力)。
56.图18为本实用新型在图16基础上配置了左遮挡罩(45)和右遮挡罩(46)后、且左高扶手杆(17)和右高扶手杆(18)都调整为朝外时示意图(高扶手朝外的好处有:单杠运动时加宽了双手握手处的宽度从来锻炼到不同部位)。
57.图19为本实用新型实施例中采用手摇式剪式升降机时左升降机(23)和右升降机(24)上的调节杆各自穿出于左后支架(7)和左遮挡罩(45)上及右后支架(8)和右遮挡罩(46)上对应位置的预先设置的匹配于左升降机(23)和右升降机(24)上的调节杆的粗细和摇动范围的左通孔(t1)和右通孔(t2)后结构示意图(采用这种结构就可以直接在左遮挡罩(45)外面就可以调节左升降机顶端(23)高度进而调节左拉簧(27)的阻力强度了及在右遮挡罩(46)外面就可以调节右升降机顶端(24)高度进而调节右拉簧(28)的阻力强度了),当然,所述左通孔(t1)和右通孔(t2)可分别设于左前支架(3)和右前支架(4)上(图中未标示)。
58.图20为本实用新型在图17基础上配置了安全带左前固定处(47)、安全带右前固定处(48)、安全带左后固定处(49)、安全带右后固定处(50)和安全裤(51)后示意图——年老体弱的运动者在锻炼前,先把安全裤(51)穿着在身上,再把四根安全带分别连接到四个安全带固定处上,这样可以防止年老体弱的锻炼者由于脚步跟不上跑带(11)速度或脚发软摔倒在地,增加了运动者锻炼时的安全性。
59.其中:1、左底架,2、右底架,3、左前支架,4、右前支架,5、左横扶手,6、右横扶手,7、左后支架,8、右后支架,9、左跑步台架,10、右跑步台架,11、跑带,12、控制系统,121、控制台,122、开始键,123、停止键,13、左竖扶手杆套管,14、右竖扶手杆套管,15、左竖扶手杆,16、右竖扶手杆,17、左高扶手杆,18、右高扶手杆,19、左轴承,20、右轴承,21、左拉簧上固定处,22、右拉簧上固定处,23、左升降机,24、右升降机,25、左拉簧下固定处,26、右拉簧下固定处,27、左拉簧,28、右拉簧,29、左固定键,30、右固定键,31、左摇摆键,32、右摇摆键,33、左电插锁,34、右电插锁,35、左锁孔,36、右锁孔,37、左锁孔杆,38、右锁孔杆,39、左竖杆检测模块,40、右竖杆检测模块,41、左手动切换模块,42、右手动切换模块,43、左支架,44、右支架,45、左遮挡罩,46、右遮挡罩,47、安全带左前固定处,48、安全带右前固定处,49、安全带左后固定处,50、安全带右后固定处,51、安全裤,t1、左通孔,t2、右通孔。
具体实施方式
60.下面结合附图和实施例,对本实用新型的具体实施方式作进一步的详细描述。
61.参看附图1-13,本实用新型实施例的按键切换竖扶手杆可摇摆或固定的单杠式摇杆跑步机,包括:由左底架(1)、右底架(2)、左前支架(3)、右前支架(4)、左横扶手(5)、右横扶手(6)、左后支架(7)、右后支架(8)、左跑步台架(9)、右跑步台架(10)、跑带(11)和控制系统(12)组成的,且在通电的情况下通过点击控制系统(12)的控制台(121)上预设的开始键(122)控制静止不动的跑带(11)运转起来,且通过点击控制系统(12)的控制台(121)上预设的停止键(123)控制运转中的跑带(11)停止运转,且左底架(1)与右底架(2)之间、左前支架(3)与右前支架(4)之间用n根连接杆连接固定使整机机架坚固的电动跑步机,其特征是:还设置有左竖扶手杆套管(13)、右竖扶手杆套管(14)、左竖扶手杆(15)、右竖扶手杆(16)、左高扶手杆(17)、右高扶手杆(18)、左轴承(19)、右轴承(20)、左拉簧上固定处(21)、右拉簧上固定处(22)、左升降机(23)、右升降机(24)、左拉簧下固定处(25)、右拉簧下固定处(26)、左
拉簧(27)、右拉簧(28)、可进行左竖扶手杆套管(13)可摇摆与固定之间电动切换的左电控切换构件、可进行右竖扶手杆套管(14)可摇摆与固定之间电动切换的右电控切换构件、左固定键(29)、右固定键(30)、左摇摆键(31)、右摇摆键(32),其中:
62.所述左横扶手(5)上配置有一根左竖扶手杆套管(13),左竖扶手杆套管(13)上段里面或外面套装着可升降可固定的左竖扶手杆(15)、左竖扶手杆(15)的顶端一体成型设置有左高扶手杆(17),左竖扶手杆套管(13)中段与左横扶手(5)之间通过左轴承(19)连接,左竖扶手杆套管(13)可以左轴承(19)为支点做前后摇摆运动,此时左竖扶手杆(15)和左高扶手杆(17)会做出与左竖扶手杆套管(13)下段相反方向的摇摆运动,
63.所述左竖扶手杆套管(13)的底端设置有左拉簧上固定处(21),左底架(1)上在左竖扶手杆套管(13)处于垂直状态时的左拉簧上固定处(21)垂直对到的位置固定设有左升降机(23),左升降机(23)顶端设有左拉簧下固定处(25),左拉簧(27)上端固定在左拉簧上固定处(21)上,左拉簧(27)下端固定在左拉簧下固定处(25)上,通过调整左升降机(23)的顶端高度可以伸缩左拉簧(27)进而调节左竖扶手杆套管(13)和左竖扶手杆(15)和左高扶手杆(17)前后摇摆运动时的运动阻力,在初始状态时,左拉簧(27)让左竖扶手杆套管(13)和左竖扶手杆(15)保持垂直、并使左高扶手杆(17)保持水平,
64.所述可进行左竖扶手杆套管(13)可摇摆与固定之间电动切换的左电控切换构件用于电动切换左竖扶手杆套管(13)的可摇摆状态和固定状态,左电控切换构件与控制系统(12)电性连接,在控制系统(12)控制断电中的左电控切换构件通电时会把固定中的左竖扶手杆套管(13)切换到可摇摆状态进而使左竖扶手杆(15)和左高扶手杆(17)也可摇摆,在控制系统(12)控制通电中的左电控切换构件断电时会把可摇摆且处于垂直状态的左竖扶手杆套管(13)切换到固定状态进而把左竖扶手杆(15)和左高扶手杆(17)也都固定住,
65.所述左固定键(29)和左摇摆键(31)各自与控制系统(12)连接,所述左固定键(29)和左摇摆键(31)设在控制系统(12)的控制台(121)左侧上,在左竖扶手杆套管(13)可摇摆状态下点击左固定键(29)时,控制系统(12)控制左电控切换构件断电,在左竖扶手杆套管(13)固定状态下点击左摇摆键(31)时,控制系统(12)控制左电控切换构件通电,
66.左右对称的,
67.所述右横扶手(6)上配置有一根右竖扶手杆套管(14),右竖扶手杆套管(14)上段里面或外面套装着可升降可固定的右竖扶手杆(16)、右竖扶手杆(16)的顶端一体成型设置有右高扶手杆(18),右竖扶手杆套管(14)中段与右横扶手(6)之间通过右轴承(20)连接,右竖扶手杆套管(14)可以右轴承(20)为支点做前后摇摆运动,此时右竖扶手杆(16)和右高扶手杆(18)会做出与右竖扶手杆套管(14)下段相反方向的摇摆运动,
68.所述右竖扶手杆套管(14)的底端设置有右拉簧上固定处(22),右底架(2)上在右竖扶手杆套管(14)处于垂直状态时的右拉簧上固定处(22)垂直对到的位置固定设有右升降机(24),右升降机(24)顶端设有右拉簧下固定处(26),右拉簧(28)上端固定在右拉簧上固定处(22)上,右拉簧(28)下端固定在右拉簧下固定处(26)上,通过调整右升降机(24)的顶端高度可以伸缩右拉簧(28)进而调节右竖扶手杆套管(14)和右竖扶手杆(16)和右高扶手杆(18)前后摇摆运动时的运动阻力,在初始状态时,右拉簧(28)让右竖扶手杆套管(14)和右竖扶手杆(16)保持垂直、并使右高扶手杆(18)保持水平,
69.所述可进行右竖扶手杆套管(14)可摇摆与固定之间电动切换的右电控切换构件
用于电动切换右竖扶手杆套管(14)的可摇摆状态和固定状态,右电控切换构件与控制系统(12)电性连接,在控制系统(12)控制断电中的右电控切换构件通电时会把固定中的右竖扶手杆套管(14)切换到可摇摆状态进而使右竖扶手杆(16)和右高扶手杆(18)也可摇摆,在控制系统(12)控制通电中的右电控切换构件断电时会把可摇摆且处于垂直状态的右竖扶手杆套管(14)切换到固定状态进而把右竖扶手杆(16)和右高扶手杆(18)也都固定住,
70.所述右固定键(30)和右摇摆键(32)各自与控制系统(12)连接,所述右固定键(30)和右摇摆键(32)设在控制系统(12)的控制台(121)右侧上,在右竖扶手杆套管(14)可摇摆状态下点击右固定键(30)时,控制系统(12)控制右电控切换构件断电,在右竖扶手杆套管(14)固定状态下点击右摇摆键(32)时,控制系统(12)控制右电控切换构件通电,
71.——当左高扶手杆(17)和右高扶手杆(18)都固定住时,运动者可以举起双手左手抓住左高扶手杆(17)、右手抓住右高扶手杆(18),进行引体向上运动或悬挂运动,此时的左高扶手杆(17)和右高扶手杆(18)就组成了不是连在一起的单杠。
72.参考附图3-5、14-16,所述可进行左竖扶手杆套管(13)可摇摆与固定之间电动切换的左电控切换构件由左电插锁(33)和左锁孔(35)及左横扶手(5)或左锁孔杆(37)构成;所述可进行右竖扶手杆套管(14)可摇摆与固定之间电动切换的右电控切换构件由右电插锁(34)和右锁孔(36)及右横扶手(6)或右锁孔杆(38)构成,其中:
73.所述左竖扶手杆套管(13)外侧上设有锁舌伸缩方向平行于左竖扶手杆套管(13)的左电插锁(33),所述左电插锁(33)为通电时锁舌缩回锁体内、断电时锁舌伸出锁体外的电插锁,所述左电插锁(33)与控制系统(12)连接、且由控制系统(12)控制其通电或断电,在左竖扶手杆套管(13)前后摇摆时处于开锁状态的左电插锁(33)跟随摇摆,
74.初始垂直状态下的左竖扶手杆套管(13)上的左电插锁(33)的锁舌轴向对应位置的左横扶手(5)上设有左锁孔(35),左电插锁(33)与左锁孔(35)组合用于切换左竖扶手杆套管(13)和左竖扶手杆(15)和左高扶手杆(17)的可摇摆状态或固定状态,左电插锁(33)在通电时即其锁舌缩在锁体内时左竖扶手杆套管(13)和左竖扶手杆(15)和左高扶手杆(17)可以左轴承(19)为支点做前后摇摆运动,初始垂直状态的左竖扶手杆套管(13)上的左电插锁(33)在断电时即左电插锁(33)的锁舌伸出时可恰好严丝合缝地插入左锁孔(35)中把初垂直始状态的左竖扶手杆套管(13)固定住,进而把左竖扶手杆(15)和左高扶手杆(17)都固定住,
75.或,所述左锁孔(35)设在加设在左前支架(3)中上段与左后支架(7)中上段之间的对应于初始状态的左电插锁(33)的锁舌伸出位置的左锁孔杆(37)上,此时,所述左锁孔杆(37)还用于增加整机的坚固度,在左竖扶手杆套管(13)处于初始垂直状态时或在其做前后摇摆运动时左锁孔杆(37)与左竖扶手杆套管(13)和或左升降机(23)和或左拉簧(27)都不触碰,
76.左右对称的,
77.所述右竖扶手杆套管(14)外侧上设有锁舌伸缩方向平行于右竖扶手杆套管(14)的右电插锁(34),所述右电插锁(34)为通电时锁舌缩回锁体内、断电时锁舌伸出锁体外的电插锁,所述右电插锁(34)与控制系统(12)连接、且由控制系统(12)控制其通电或断电,在右竖扶手杆套管(14)前后摇摆时处于开锁状态的右电插锁(34)跟随摇摆,
78.初始垂直状态下的右竖扶手杆套管(14)上的右电插锁(34)的锁舌轴向对应位置
的右横扶手(6)上设有右锁孔(36),右电插锁(34)与右锁孔(36)组合用于切换右竖扶手杆套管(14)和右竖扶手杆(16)和右高扶手杆(18)的可摇摆状态或固定状态,右电插锁(34)在通电时即其锁舌缩在锁体内时右竖扶手杆套管(14)和右竖扶手杆(16)和右高扶手杆(18)可以右轴承(20)为支点做前后摇摆运动,初始垂直状态的右竖扶手杆套管(14)上的右电插锁(34)在断电时即右电插锁(34)的锁舌伸出时可恰好严丝合缝地插入右锁孔(36)中把初始垂直状态的左竖扶手杆套管(13)固定住,进而把右竖扶手杆(16)和右高扶手杆(18)都固定住,
79.或,所述右锁孔(36)设在加设在右前支架(4)中上段与右后支架(8)中上段之间的对应于初始状态的右电插锁(34)的锁舌伸出位置的右锁孔杆(38)上,此时,所述右锁孔杆(38)还用于增加整机的坚固度,在右竖扶手杆套管(14)处于初始垂直状态时或在其做前后摇摆运动时右锁孔杆(38)与右竖扶手杆套管(14)和或右升降机(24)和或右拉簧(28)都不触碰。
80.所述控制系统(12)内还设有运动人体安防程序,所述运动人体安防程序的具体设置为:
81.在点击开始键(122)控制静止不动的跑带(11)运转后,控制系统(12)不执行左固定键(29)、右固定键(30)、左摇摆键(31)和或右摇摆键(32)发出的可摇摆或固定的指令,以预防锻炼者一边在运转中的跑带(11)上进行跑步或走路运动一边进行切换左竖扶手杆(15)和左高扶手杆(17)及右竖扶手杆(16)和右高扶手杆(18)的可摇摆或固定时带来安全隐患,
82.在点击停止键(123)控制运转中的跑带(11)停止运转后延时5-10秒钟,控制系统(12)执行左固定键(29)、右固定键(30)、左摇摆键(31)和或右摇摆键(32)发出的可摇摆或固定的指令,即在跑带(11)静止不动时才能切换左竖扶手杆(15)和左高扶手杆(17)及右竖扶手杆(16)和右高扶手杆(18)的可摇摆或固定——由于按停止键(123)时跑带(11)5-10秒钟才能缓慢减速到静止不动,所以需要相应时间的延时。
83.参看附图14-15,所述左竖扶手杆套管(13)上或左电控切换构件内设有左竖杆检测模块(39)、所述右竖扶手杆套管(14)上或右电控切换构件内设有右竖杆检测模块(40),所述左竖杆检测模块(39)和右竖杆检测模块(40)各自与控制系统(12)连接,其中:
84.所述左竖杆检测模块(39)用于检测左竖扶手杆套管(13)是否已经垂直且已经静止不动、并将检测信息反馈给控制系统(12),当检测到左竖扶手杆套管(13)已经垂直且已经静止不动时,控制系统(12)执行左固定键(29)或左摇摆键(31)发出的可摇摆或固定的指令,当检测到左竖扶手杆套管(13)没有垂直或没有静止不动时,控制系统(12)不执行左固定键(29)或左摇摆键(31)发出的可摇摆或固定的指令,这样就可以预防左竖扶手杆套管(13)在还没有垂直且静止不动时左电控切换构件就进行可摇摆或固定的切换操作损坏本机,
85.所述右竖杆检测模块(40)用于检测右竖扶手杆套管(14)是否已经垂直且已经静止不动、并将检测信息反馈给控制系统(12),当检测到右竖扶手杆套管(14)已经垂直且已经静止不动时,控制系统(12)执行右固定键(30)或右摇摆键(32)发出的可摇摆或固定的指令,当检测到右竖扶手杆套管(14)没有垂直或没有静止不动时,控制系统(12)不执行右固定键(30)或右摇摆键(32)发出的可摇摆或固定的指令,这样就可以预防右竖扶手杆套管
(14)在还没有垂直且静止不动时右电控切换构件就进行可摇摆或固定的切换操作损坏本机,
86.——在左竖扶手杆套管(13)或右竖扶手杆套管(14)还没有垂直且静止不动时左电插锁(29)或右电插锁(30)的锁舌就进行伸出或缩回的操作就会使左电插锁(29)或右电插锁(30)的锁舌与相应锁孔或相应锁孔杆之间发生碰撞损坏本机。
87.参看附图10、11、14、15,所述左电控切换构件内设有左手动切换模块(41)、左手动切换模块(41)用于在控制系统(12)没电时可以手动切换左竖扶手杆套管(13)和左竖扶手杆(15)和左高扶手杆(17)的可摇摆或固定,所述右电控切换构件内设有右手动切换模块(42)、右手动切换模块(42)用于在控制系统(12)没电时可以手动切换右竖扶手杆套管(14)和右竖扶手杆(16)和右高扶手杆(18)的可摇摆或固定,
88.且,在控制系统(12)有电时,控制系统(12)控制左手动切换模块(41)和右手动切换模块(42)无法启动,即在控制系统(12)有电时左手动切换模块(41)和右手动切换模块(42)处于无效状态。
89.——电插锁上设有手动模块是公开技术,在此不再赘述。
90.所述左固定键(29)和右固定键(30)可合二为一成总固定键,在点击总固定键时,控制系统(12)控制左电控切换构件和右电控切换构件同时断电;所述左摇摆键(31)和右摇摆键(32)可合二为一成总摇摆键,在点击总摇摆键时,控制系统(12)控制左电控切换构件和右电控切换构件同时通电;
91.所述左手动切换模块(41)的手动控制把手和右手动切换模块(42)的手动控制把手可分别通过一拖二闸线连接到设在控制台(121)上的总控制把手上,通过总控制把手同时手动切换左竖扶手杆套管(13)和左竖扶手杆(15)和左高扶手杆(17)的可摇摆或固定及右竖扶手杆套管(14)和右竖扶手杆(16)和右高扶手杆(18)的可摇摆或固定。
92.参看附图16,所述左锁孔杆(37)与左底架(1)和或左前支架(3)和或左横扶手(5)和或左后支架(7)之间通过n个左支架(43)连接固定,以利于整机的坚固,所述右锁孔杆(38)与右底架(2)和或右前支架(4)和或右横扶手(6)和或右后支架(8)之间通过n个右支架(44)连接固定,以利于整机的坚固;和或,所述左底架(1)与左横扶手(5)之间可以加装左支架(43),以利于整机的坚固,所述右底架(2)与右横扶手(6)之间可以加装右支架(44),以利于整机的坚固;所述与左锁孔杆(37)连接的左支架(43)和与右锁孔杆(38)连接的右支架(44)还作为限位器使用,用以分别限制左竖扶手杆套管(13)和右竖扶手杆套管(14)的最大摇摆幅度、进而限定左竖扶手杆(15)和左高扶手杆(17)及右竖扶手杆(16)和右高扶手杆(18)的最大摇摆幅度,此时,朝向左竖扶手杆套管(13)一边的左支架(43)和朝向右竖扶手杆套管(14)一边的右支架(44)上各自设有减震器以防止左竖扶手杆套管(13)与左支架(43)之间及右竖扶手杆套管(14)与右支架(44)之间的强烈碰撞。
93.参看附图17-20,还可以还可以设置左遮挡罩(45)和右遮挡罩(46),其中,左遮挡罩(45)设在左底架(1)和或左跑步台架(9)上、其右壁恰好遮挡住左跑步台架(9)的右侧边,并遮挡住左底架(1)、左前支架(3)、左横扶手(5)、左后支架(7)及左跑步台架(9)之间区域,且不会影响左竖扶手杆套管(13)的摇摆和左升降机(23)的升降及左电插锁(33)的摇摆或开锁或锁定——左遮挡罩(43)用以防止运动者运动时脚步踩到左跑步台架(9)上及防止运动者和或旁人身体触碰到左竖扶手杆套管(13)、左升降机(23)、左拉簧(27)、左电插锁(29)
和或左锁孔杆(33)引起运动伤害;
94.左右对称的,右遮挡罩(46)设在右底架(2)和或右跑步台架(10)上、其左壁恰好遮挡住右跑步台架(10)的左侧边,并遮挡住右底架(2)、右前支架(4)、右横扶手(6)、右后支架(8)及右跑步台架(10)之间区域,且不会影响右竖扶手杆套管(14)的摇摆和右升降机(24)的升降及右电插锁(34)的摇摆或开锁或锁定——右遮挡罩(44)用以防止运动者运动时脚步踩到右跑步台架(10)上及防止运动者和或旁人身体触碰到右竖扶手杆套管(14)、右升降机(24)、右拉簧(28)、右电插锁(30)和或右锁孔杆(34)引起运动伤害。
95.参看附图20,还可以设有安全带左前固定处(47)、安全带右前固定处(48)、安全带左后固定处(49)、安全带右后固定处(50)和安全裤(51),其中,所述左横扶手(5)前端和或左遮挡罩(45)前端上端上设有安全带左前固定处(47)、所述左横扶手(5)后端和或左遮挡罩(45)后端上端上设有安全带左后固定处(49);左右对称的,所述右横扶手(6)前端和或右遮挡罩(46)前端上端上设有安全带右前固定处(48)、所述右横扶手(6)后端和或右遮挡罩(46)后端上端上设有安全带右后固定处(50),所述安全裤(51)用于穿着在运动者身上,所述安全裤(51)上平均间距设有四根安全带,四根安全带分别连接到安全带左前固定处(47)、安全带右前固定处(48)、安全带左后固定处(49)和安全带右后固定处(50)上——年老体弱的运动者在锻炼前,先把安全裤(51)穿着在身上,再把四根安全带分别连接到四个安全带固定处上,这样可以防止年老体弱的锻炼者由于脚步跟不上跑带(11)速度或脚软摔倒在地、增加了运动者锻炼时的安全性。
96.参看附图3-5、17-18,所述左升降机(23)和右升降机(24)是机械式升降机或液压式升降机或气压式升降机或电动升降机,其高度调节是手动的或电动或自动感应控制的;和或,所述左升降机(23)和右升降机(24)首选手摇式剪式升降机,此时所述左升降机(23)和右升降机(24)上的调节杆各自穿出于左前支架(3)或左后支架(7)和左遮挡罩(45)及右前支架(4)或右后支架(8)和右遮挡罩(46)上对应位置上的预先设置的匹配于左升降机(23)和右升降机(24)上的调节杆的粗细和摇摆范围的左通孔(t1)和右通孔(t2),通过操作露出于通孔外的调节杆手柄可各自调节左升降机(23)和右升降机(24)的顶端高度进而调节左拉簧(27)和右拉簧(28)的阻力强度;和或,左通孔(t1)和右通孔(t2)边上各自设有阻力度刻度表、用于对应显示调节杆在某一位置时其具体的阻力是多少或在某一区间;和或,左通孔(t1)和右通孔(t2)外各自配置有弹性伸缩护套用以防止灰尘进入相应遮挡罩内;和或,所述控制系统(12)还包括信息存储及处理模块,信息存储及处理系统用于输入、存储、处理和指向n个不同锻炼者的身体资料和运动资料,并安排合理的运动方式、运动时间、运动速度、运动幅度和或运动强度;和或,所述控制系统(12)预先设置有运动程序,并可根据存储的、并随时进行补充的锻炼者身体资料和运动资料安排不同锻炼者的个性化运动程序;和或,通过点击控制系统(12)上预设的跑带进退开关可以把跑带(11)的运行方向调整为向前进或向后退;和或,所述左高扶手杆(17)和右高扶手杆(18)的高度调节是人工的或电动的或自动检测感应控制的;和或,所述左高扶手杆(17)和右高扶手杆(18)可调整前后左右四个朝向;和或,所述左竖扶手杆套管(13)与左竖扶手杆(15)之间及右竖扶手杆套管(14)与右竖扶手杆(16)之间设有高度刻度表,用以分别确定左高扶手杆(17)及右高扶手杆(18)的具体高度;和或,所述左横扶手(5)和或右横扶手(6)和或左竖扶手杆(15)或和右竖扶手杆(16)和或左高扶手杆(17)和或右高扶手杆(18)上全部或单独配置有心率传感器、用
于实时检测运动者心率、并在心率超出预设心率范围时控制系统(12)控制跑带(11)停止运转并发出警报;和或,所述左底架(1)、右底架(2)、左前支架(3)、右前支架(4)、左横扶手(5)、右横扶手(6)、左后支架(7)、右后支架(8)、左跑步台架(9)、右跑步台架(10)、控制台(121)、左遮挡罩(45)和或右遮挡罩(46)上可配置扭腰器、俯卧撑架、压腿器、哑铃、仰卧起坐器、拉力器、拉力带、电动按摩器、脚步影像仪、双杠器、腰背按摩器、太极揉推器、伸背架、臂力大转轮、上肢牵引器、颈椎锻炼器、空气净化器、臭氧发生机、软性扶手、虚拟现实设备及运动性、康复性或防护性辅助器械;和或,四根安全带可拆装;和或,所述左跑步台架(9)与右跑步台架(10)前段上方之间设有紧急安全绳,紧急安全绳连接到控制台(121)上预设的紧急开关,用于当锻炼者脚步太靠近跑带(11)前端和跑带(11)后端时人体会拉扯紧急安全绳以触发紧急开关使所述电动跑步机紧急停机进而保护锻炼者安全;和或,所述左电控切换构件和右电控切换构件在每次电动切换时控制系统(12)都通过预设的声光系统发出语音和或灯光提醒,以使锻炼者有身心准备;和或,还可设置左滚轮架、右滚轮架、左滚轮、右滚轮,所述左滚轮架设置在左竖扶手杆套管(13)的下端,左滚轮通过滚轮轴固定在左滚轮架上,此时左拉簧上固定处(21)设置在左滚轮架的底端上,所述左锁孔杆(37)悬空穿过左滚轮架内,左锁孔杆(37)是曲线型的,其上沿曲线与左滚轮下沿以左轴承(19)为支点滚动产生的曲线完全吻合,左锁孔杆(37)上沿支撑起左滚轮下沿,在左竖扶手杆套管(13)和左竖扶手杆(15)和左高扶手杆(17)摇摆运动时左滚轮在左锁孔杆(37)上跟随滚动,这时,左锁孔杆(37)不仅是导向轨,而且还是承重杆、用于增加左高扶手杆(17)的承载力,左右对称的,所述右滚轮架设置在右竖扶手杆套管(14)的下端,右滚轮通过滚轮轴固定在右滚轮架上,此时右拉簧上固定处(22)设置在右滚轮架的底端上,所述右锁孔杆(38)悬空穿过右滚轮架内,右锁孔杆(38)是曲线型的,其上沿曲线与右滚轮下沿以右轴承(20)为支点滚动产生的曲线完全吻合,右锁孔杆(38)上沿支撑起右滚轮下沿,在右竖扶手杆套管(14)和右竖扶手杆(16)和右高扶手杆(18)摇摆运动时右滚轮在右锁孔杆(38)上跟随滚动,这时,右锁孔杆(38)不仅是导向轨,而且还是承重杆、用于增加右高扶手杆(18)的承载力——关于左滚轮架、右滚轮架、左滚轮、右滚轮的设置请参考202121577177x号实用新型专利的权利要求3。
97.——安全绳和紧急开关的技术属于公开技术,在此不再赘述。
98.最后,还需要注意的是,以上列举的仅是本实用新型的具体实施例。显然,本实用新型不限于以上实施例,还可以有很多变形,本领域的普通技术人员能从本实用新型的公开的内容直接导出或联想到的所有变形,均应认为是本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。