1.本发明涉及共享电动汽车领域,特别是涉及一种共享电动汽车的调度方法、系统及设备。
背景技术:
2.共享电动汽车的产生对减少交通拥堵、节能减排、促进共享经济发展具有显著推动作用。但是,用户出行需求的潮汐性和不对称性会造成共享电动汽车的站点间车辆分配不均衡,导致有的站点车辆积压,车辆利用率低且用户无法还车;而有的站点则无车可租,订单流失,这严重阻碍了共享电动汽车的发展,因而需要通过外界干扰进行车辆调度实现站点间车辆分布的再平衡。
3.目前,按照调度任务执行主体的不同,共享电动汽车调度策略可分为员工调度和用户调度。员工调度即派出专职员工对各个站点间的车辆进行再平衡调度。用户调度则是指通过动态定价或价格激励的方式引导用户的取车和还车行为,以实现对车辆的调度。但是,员工调度和用户调度存在调度成本高、调度效率低及调度效果不理想等缺点。
4.因此,如何提供一种解决上述技术问题的方案是本领域的技术人员目前需要解决的问题。
技术实现要素:
5.本发明的目的是提供一种共享电动汽车的调度方法、系统及设备,同时满足了用户取车需求、用户还车需求及车辆充电需求,且可自动实现车辆调度区域内的车辆调度,具有调度成本低、调度效率高及调度效果好等优点。
6.为解决上述技术问题,本发明提供了一种共享电动汽车的调度方法,应用于包含多个共享电动汽车的站点的车辆调度区域,包括:
7.在根据预设车辆调度触发策略判定出所述车辆调度区域当前需要触发车辆调度任务时,根据多个所述站点的当前站点状态,得到多个所述站点中的有桩站点、无桩有充电需求站点、可用车辆盈余站点及可用车辆不足站点;
8.在满足所述车辆调度区域当前的取车需求、还车需求及车辆充电需求的约束条件下,规划出所述可用车辆盈余站点调往所述可用车辆不足站点的可用车辆数量,及所述无桩有充电需求站点调往所述有桩站点的待充电车辆数量;
9.根据所述可用车辆数量和所述待充电车辆数量确定待调度的目标共享电动汽车及所述目标共享电动汽车的站点调度任务,并将所述站点调度任务相应下发至所述目标共享电动汽车,以使所述目标共享电动汽车进入无人驾驶模式并自主完成所述站点调度任务。
10.可选地,所述车辆调度触发策略的预设过程,包括:
11.每隔预设时间间隔均根据预设用户需求预测模型预测多个所述站点当前的取车需求和还车需求;
12.根据所述用户需求预测模型的当前预测结果及多个所述站点的当前站点情况,确定多个所述站点的当前站点状态;
13.根据多个所述站点的当前站点状态,判断多个所述站点中是否存在可用车辆不足站点和/或无桩有充电需求站点;
14.若是,则确定所述车辆调度区域在本轮时间间隔内需要触发车辆调度任务;
15.若否,则确定所述车辆调度区域在本轮时间间隔内无需触发车辆调度任务。
16.可选地,所述用户需求预测模型的预设过程,包括:
17.基于lstm神经网络构建并训练好用户取车需求预测模型及用户还车需求预测模型;其中,所述用户取车需求预测模型用于根据站点的取车订单数量、订单平均取车间隔、订单平均时长及订单平均价格预测站点的取车订单数量;所述用户还车需求预测模型用于根据站点的还车订单数量、订单平均取车间隔、订单平均时长及订单平均价格预测站点的还车订单数量;
18.则每隔预设时间间隔均根据预设用户需求预测模型预测多个所述站点的取车需求和还车需求,包括:
19.在t时刻预测站点k的取车需求时,将t时刻站点k的取车订单数量、订单平均取车间隔、订单平均时长及订单平均价格输入至所述用户取车需求预测模型,得到t时刻站点k的取车订单预测值
20.在t时刻预测站点k的还车需求时,将t时刻站点k的还车订单数量、订单平均取车间隔、订单平均时长及订单平均价格输入至所述用户还车需求预测模型,得到t时刻站点k的还车订单预测值
21.可选地,根据所述用户需求预测模型的当前预测结果及多个所述站点的当前站点情况,确定多个所述站点的当前站点状态,包括:
22.判断目标站点的当前可用车辆数量是否能够满足所述目标站点当前的取车需求;其中,所述目标站点为任一所述站点;
23.若能够满足,则确定所述目标站点当前为可用车辆盈余站点;
24.若不能够满足,则确定所述目标站点当前为可用车辆不足站点;
25.判断所述目标站点是否有充电桩;
26.若有充电桩,则确定所述目标站点为有桩站点;
27.若无充电桩,则确定所述目标站点为无桩站点,并判断所述目标站点当前是否有待充电车辆;
28.若有待充电车辆,则确定所述目标站点当前为无桩有充电需求站点;
29.若无待充电车辆,则确定所述目标站点当前为无桩无充电需求站点。
30.可选地,所述目标站点当前的可用车辆和待充电车辆的确定过程,包括:
31.判断第一共享电动汽车的当前电池剩余电量是否小于预设电量阈值;其中,所述第一共享电动汽车为所述目标站点内任一共享电动汽车;
32.若是,则确定所述第一共享电动汽车当前为待充电车辆;
33.若否,则确定所述第一共享电动汽车当前为可用车辆。
34.可选地,在满足所述车辆调度区域当前的取车需求、还车需求及车辆充电需求的
约束条件下,规划出所述可用车辆盈余站点调往所述可用车辆不足站点的可用车辆数量,及所述无桩有充电需求站点调往所述有桩站点的待充电车辆数量,包括:
35.在所述车辆调度区域内进行本轮车辆调度过程中,确定所述共享电动汽车因本轮车辆调度对应产生的最小碳排放的目标函数排放的目标函数排放的目标函数其中,为t时刻发起的车辆调度任务中可用车辆盈余站点i调往可用车辆不足站点j的可用车辆数量;为t时刻发起的车辆调度任务中无桩有充电需求站点m调往有桩站点n的待充电车辆数量;efom为电量边际排放因子;efbm为容量边际排放因子;e
power
为共享电动汽车的百公里耗电量;i
t
为t时刻可用车辆盈余站点集合;j
t
为t时刻可用车辆不足站点集合;为可用车辆盈余站点i到可用车辆不足站点j的行驶里程;m
t
为t时刻无桩有充电需求站点集合;n
t
为t时刻有桩站点集合;为无桩有充电需求站点m到有桩站点n的行驶里程;
36.在满足所述车辆调度区域在本轮车辆调度的取车需求、还车需求、车辆充电需求及调度时长的约束条件下,对所述目标函数进行最优求解,得到本轮车辆调度下所述可用车辆盈余站点调往所述可用车辆不足站点的可用车辆数量,及所述无桩有充电需求站点调往所述有桩站点的待充电车辆数量。
37.可选地,在满足所述车辆调度区域在本轮车辆调度的取车需求、还车需求、车辆充电需求及调度时长的约束条件下,对所述目标函数进行最优求解,得到本轮车辆调度下所述可用车辆盈余站点调往所述可用车辆不足站点的可用车辆数量,及所述无桩有充电需求站点调往所述有桩站点的待充电车辆数量,包括:
38.预先建立所述可用车辆盈余站点的取车需求约束条件预先建立所述可用车辆盈余站点的取车需求约束条件及所述可用车辆不足站点的取车需求约束条件其中,为t时刻位于站点k的共享电动汽车总数量;为t时刻站点k的取车订单预测值;为站点k调出的可用车辆总数量;为站点k调入的可用车辆总数量;
39.建立可用车辆盈余且有桩站点的还车需求约束条件建立可用车辆盈余且有桩站点的还车需求约束条件可用车辆盈余且无桩有充电需求站点的还车需求约束条件可用车辆盈余且无桩无充电需求站点的还车需求约束条件盈余且无桩无充电需求站点的还车需求约束条件可用车辆不足且有桩站点的还车需求约束条件
可用车辆不足且无桩有充电需求站点的还车需求约束条件需求站点的还车需求约束条件及可用车辆不足且无桩无充电需求站点的还车需求约束条件其中;limitk为站点k的停车位总数量;为t时刻站点k的还车订单预测值;为站点k调入的待充电车辆总数量;为站点k调出的待充电车辆总数量;
40.建立待充电车辆的充电需求约束条件其中,为t时刻站点k的待充电车辆总数量;
41.建立单轮车辆调度的调度时长约束条件ifthen其中,为t时刻共享电动汽车从站点i行驶至站点j的调度时长;为预设调度限定时长;
42.在满足所述车辆调度区域在本轮车辆调度的取车需求、还车需求、车辆充电需求及调度时长的约束条件下,对所述目标函数进行最优求解,得到本轮车辆调度下所述可用车辆盈余站点调往所述可用车辆不足站点的可用车辆数量,及所述无桩有充电需求站点调往所述有桩站点的待充电车辆数量。
43.可选地,多个所述站点的共享电动汽车划分为电池剩余电量小于预设电量阈值的待充电车辆和电池剩余电量不小于预设电量阈值的可用车辆;
44.所述共享电动汽车的调度方法还包括:
45.若所述目标函数不可解,则将所述电量阈值减去预设电量变化量,得到新电量阈值,以基于所述新电量阈值更新所述共享电动汽车的划分结果及多个所述站点的站点状态,而后重新执行在满足所述车辆调度区域在本轮车辆调度的取车需求、还车需求、车辆充电需求及调度时长的约束条件下,对所述目标函数进行最优求解的步骤,直至求得所述目标函数的最优解。
46.为解决上述技术问题,本发明还提供了一种共享电动汽车的调度系统,应用于包含多个共享电动汽车的站点的车辆调度区域,包括:
47.调度触发模块,用于在根据预设车辆调度触发策略判定出所述车辆调度区域当前需要触发车辆调度任务时,根据多个所述站点的当前站点状态,得到多个所述站点中的有桩站点、无桩有充电需求站点、可用车辆盈余站点及可用车辆不足站点;
48.调度规划模块,用于在满足所述车辆调度区域当前的取车需求、还车需求及车辆充电需求的约束条件下,规划出所述可用车辆盈余站点调往所述可用车辆不足站点的可用车辆数量,及所述无桩有充电需求站点调往所述有桩站点的待充电车辆数量;
49.调度执行模块,用于根据所述可用车辆数量和所述待充电车辆数量确定待调度的目标共享电动汽车及所述目标共享电动汽车的站点调度任务,并将所述站点调度任务相应下发至所述目标共享电动汽车,以使所述目标共享电动汽车进入无人驾驶模式并自主完成
所述站点调度任务。
50.为解决上述技术问题,本发明还提供了一种共享电动汽车的调度设备,包括:
51.存储装置,用于存储计算机程序;
52.处理装置,用于在执行所述计算机程序时实现上述任一种共享电动汽车的调度方法的步骤。
53.本发明提供了一种共享电动汽车的调度方法,应用于包含多个共享电动汽车的站点的车辆调度区域,包括:在根据预设车辆调度触发策略判定出车辆调度区域当前需要触发车辆调度任务时,根据多个站点的当前站点状态,得到多个站点中的有桩站点、无桩有充电需求站点、可用车辆盈余站点及可用车辆不足站点;在满足车辆调度区域当前的取车需求、还车需求及车辆充电需求的约束条件下,规划出可用车辆盈余站点调往可用车辆不足站点的可用车辆数量,及无桩有充电需求站点调往有桩站点的待充电车辆数量;根据可用车辆数量和待充电车辆数量确定待调度的目标共享电动汽车及目标共享电动汽车的站点调度任务,并将站点调度任务相应下发至目标共享电动汽车,以使目标共享电动汽车进入无人驾驶模式并自主完成站点调度任务。可见,本技术同时满足了用户取车需求、用户还车需求及车辆充电需求,且可自动实现车辆调度区域内的车辆调度,具有调度成本低、调度效率高及调度效果好等优点。
54.本发明还提供了一种共享电动汽车的调度系统及设备,与上述调度方法具有相同的有益效果。
附图说明
55.为了更清楚地说明本发明实施例中的技术方案,下面将对现有技术和实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
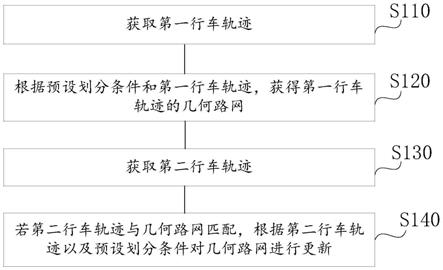
56.图1为本发明实施例提供的一种共享电动汽车的调度方法的流程图;
57.图2为本发明实施例提供的一种用户需求预测模型的构建原理图;
58.图3为本发明实施例提供的一种车辆调度区域内多个站点的站点状态识别分类原理图;
59.图4为本发明实施例提供的一种基于补电优先度的模型迭代求解流程图;
60.图5为本发明实施例提供的一种车辆调度区域的全天滚动自适应动态车辆调度流程图;
61.图6为本发明实施例提供的一种运营区域正六边形划分结果图;
62.图7为本发明实施例提供的一种研究区域内站点位置分布图;
63.图8为本发明实施例提供的一种共享电动汽车的调度系统的结构示意图。
具体实施方式
64.本发明的核心是提供一种共享电动汽车的调度方法、系统及设备,同时满足了用户取车需求、用户还车需求及车辆充电需求,且可自动实现车辆调度区域内的车辆调度,具有调度成本低、调度效率高及调度效果好等优点。
65.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
66.请参照图1,图1为本发明实施例提供的一种共享电动汽车的调度方法的流程图。
67.该共享电动汽车的调度方法应用于包含多个共享电动汽车的站点的车辆调度区域,包括:
68.步骤s1:在根据预设车辆调度触发策略判定出车辆调度区域当前需要触发车辆调度任务时,根据多个站点的当前站点状态,得到多个站点中的有桩站点、无桩有充电需求站点、可用车辆盈余站点及可用车辆不足站点。
69.需要说明的是,本技术的共享电动汽车的调度方法在如下前提下实现:1)系统运营的共享电动汽车均为同质纯电动汽车,服务模式为单程序(允许用户在任意站点取车和还车),且任何时刻1辆共享电动汽车只能满足1个订单需求;2)有桩站点的充电桩数量与停车位数量相等;3)车辆调度任务在设定的时间间隔起始执行,用户取车、还车行为在时间间隔开始进行,在时间间隔末尾结束;4)共享电动汽车调度过程中引起的电池电量衰减忽略不计;5)共享电动汽车支持无人驾驶,无人驾驶共享电动汽车在给定起始站点、终止站点及行驶路线的情况下能够自主完成站点调度任务;6)为控制每轮车辆调度任务的执行时长,将半径为7km的正六边形区域设定为车辆调度的基本单元,同一个正六边形区域(车辆调度区域)内的共享电动汽车和站点通过车辆调度实现内部自平衡,不同车辆调度区域的车辆调度任务互不干扰。
70.具体地,本技术提前设置车辆调度触发策略,以根据车辆调度触发策略判定车辆调度区域当前是否需要触发车辆调度任务,若判定出车辆调度区域当前无需触发车辆调度任务,则不对车辆调度区域进行车辆调度处理;若判定出车辆调度区域当前需要触发车辆调度任务,则对车辆调度区域进行车辆调度处理。
71.本技术在判定出车辆调度区域当前需要触发车辆调度任务时,首先根据车辆调度区域内多个站点的当前站点状态,得到车辆调度区域内多个站点中的有桩站点(有充电桩的站点)、无桩有充电需求站点(无充电桩且有待充电车辆的站点)、可用车辆盈余站点(可用车辆数量能够满足用户取车需求的站点)及可用车辆不足站点(可用车辆数量无法满足用户取车需求的站点),以为车辆调度规划提供依据。
72.步骤s2:在满足车辆调度区域当前的取车需求、还车需求及车辆充电需求的约束条件下,规划出可用车辆盈余站点调往可用车辆不足站点的可用车辆数量,及无桩有充电需求站点调往有桩站点的待充电车辆数量。
73.具体地,本技术在满足车辆调度区域当前的取车需求、还车需求及车辆充电需求的约束条件(即满足车辆调度区域内所有站点当前的取车需求、还车需求及车辆充电需求的约束条件)下,规划出车辆调度区域内可用车辆盈余站点调往可用车辆不足站点的可用车辆数量,并规划出车辆调度区域内无桩有充电需求站点调往有桩站点的待充电车辆数量。
74.步骤s3:根据可用车辆数量和待充电车辆数量确定待调度的目标共享电动汽车及目标共享电动汽车的站点调度任务,并将站点调度任务相应下发至目标共享电动汽车,以
使目标共享电动汽车进入无人驾驶模式并自主完成站点调度任务。
75.具体地,本技术根据车辆调度区域内可用车辆盈余站点调往可用车辆不足站点的可用车辆数量及车辆调度区域内无桩有充电需求站点调往有桩站点的待充电车辆数量,从车辆调度区域的站点内的共享电动汽车中确定待调度的目标共享电动汽车及目标共享电动汽车的站点调度任务,然后将站点调度任务相应下发至目标共享电动汽车,以使目标共享电动汽车进入无人驾驶模式并自主完成站点调度任务,从而满足车辆调度区域当前的取车需求、还车需求及车辆充电需求。
76.比如,车辆调度区域内可用车辆盈余站点i调往可用车辆不足站点j的可用车辆数量为2,则从可用车辆盈余站点i内的可用车辆中确定待调度的两辆目标可用车辆,并确定两辆目标可用车辆的站点调度任务(起始站点i、终止站点j及起始站点i和终止站点j之间的行驶路线),然后将此站点调度任务下发至两辆目标可用车辆,以使两辆目标可用车辆均进入无人驾驶模式并自主完成站点调度任务,即可用车辆盈余站点i中两辆目标可用车辆调往可用车辆不足站点j。
77.车辆调度区域内无桩有充电需求站点m调往有桩站点n的待充电车辆数量为2,则从无桩有充电需求站点m内的待充电车辆中确定待调度的两辆目标待充电车辆,并确定两辆目标待充电车辆的站点调度任务(起始站点m、终止站点n及起始站点m和终止站点n之间的行驶路线),然后将此站点调度任务下发至两辆目标待充电车辆,以使两辆目标待充电车辆均进入无人驾驶模式并自主完成站点调度任务,即无桩有充电需求站点m中两辆目标待充电车辆调往有桩站点n。
78.可见,本技术同时满足了用户取车需求、用户还车需求及车辆充电需求,且可自动实现车辆调度区域内的车辆调度,具有调度成本低、调度效率高及调度效果好等优点。
79.在上述实施例的基础上:
80.作为一种可选的实施例,车辆调度触发策略的预设过程,包括:
81.每隔预设时间间隔均根据预设用户需求预测模型预测多个站点当前的取车需求和还车需求;
82.根据用户需求预测模型的当前预测结果及多个站点的当前站点情况,确定多个站点的当前站点状态;
83.根据多个站点的当前站点状态,判断多个站点中是否存在可用车辆不足站点和/或无桩有充电需求站点;
84.若是,则确定车辆调度区域在本轮时间间隔内需要触发车辆调度任务;
85.若否,则确定车辆调度区域在本轮时间间隔内无需触发车辆调度任务。
86.具体地,本技术的车辆调度触发策略触发车辆调度区域的车辆调度任务的原理为:车辆调度区域每个运营日被等分成多个时间为δt(δt可根据车辆调度区域的用户出行需求、站点数量及运营车辆数量等确定)的时间间隔。每隔预设时间间隔δt均根据预设用户需求预测模型预测车辆调度区域内多个站点当前的取车需求和还车需求,并根据用户需求预测模型的当前预测结果及车辆调度区域内多个站点的当前站点情况,确定车辆调度区域内多个站点的当前站点状态,然后根据车辆调度区域内多个站点的当前站点状态,判断车辆调度区域内多个站点中是否存在可用车辆不足站点和/或无桩有充电需求站点;若存在可用车辆不足站点和/或无桩有充电需求站点,则确定车辆调度区域在本轮时间间隔
内需要触发车辆调度任务;若不存在可用车辆不足站点和/或无桩有充电需求站点,则确定车辆调度区域在本轮时间间隔内无需触发车辆调度任务。
87.作为一种可选的实施例,用户需求预测模型的预设过程,包括:
88.基于lstm神经网络构建并训练好用户取车需求预测模型及用户还车需求预测模型;其中,用户取车需求预测模型用于根据站点的取车订单数量、订单平均取车间隔、订单平均时长及订单平均价格预测站点的取车订单数量;用户还车需求预测模型用于根据站点的还车订单数量、订单平均取车间隔、订单平均时长及订单平均价格预测站点的还车订单数量;
89.则每隔预设时间间隔均根据预设用户需求预测模型预测多个站点的取车需求和还车需求,包括:
90.在t时刻预测站点k的取车需求时,将t时刻站点k的取车订单数量、订单平均取车间隔、订单平均时长及订单平均价格输入至用户取车需求预测模型,得到t时刻站点k的取车订单预测值
91.在t时刻预测站点k的还车需求时,将t时刻站点k的还车订单数量、订单平均取车间隔、订单平均时长及订单平均价格输入至用户还车需求预测模型,得到t时刻站点k的还车订单预测值
92.具体地,本技术的用户需求预测模型包括用户取车需求预测模型和用户还车需求预测模型,其构建原理为:不同于传统的神经网络,lstm(long short-term memory,长短期记忆)神经网络(一种时间循环神经网络)克服了循环神经网络的梯度消失、梯度爆炸及长期记忆能力不足的问题,适用于长距离时序信息的处理和预测。本技术基于lstm神经网络构建用户取车需求预测模型和用户还车需求预测模型。需要说明的是,取车订单数量、还车订单数量、订单平均取车间隔、订单平均时长及订单平均价格这五个特征通过格兰杰因果检验被证明是用户出行需求的显著影响特征,因而选取该五个特征作为用户需求预测模型的输入以预测用户出行需求。用户取车需求预测模型具体用于根据站点的取车订单数量、订单平均取车间隔、订单平均时长及订单平均价格预测站点的取车订单数量;用户还车需求预测模型具体用于根据站点的还车订单数量、订单平均取车间隔、订单平均时长及订单平均价格预测站点的还车订单数量。
93.在构建好用户取车需求预测模型和用户还车需求预测模型后,需先对用户取车需求预测模型和用户还车需求预测模型进行训练,然后再投入使用。如图2所示,站点k的历史取车订单数量(单)、站点k的历史订单平均取车间隔(分钟)、站点k的历史订单平均时长(分钟)、站点k的历史订单平均价格(元)四个特征指标的历史数据作为lstm用户取车需求预测模型的输入以训练模型从而预测站点k取车需求;站点k的历史还车订单数量(单)、四个特征指标的历史数据作为lstm用户还车需求预测模型的输入以训练模型从而预测站点k还车需求。
94.基于此,以车辆调度区域内的站点k为例,说明用户取车需求预测模型和用户还车需求预测模型的应用过程:在t时刻预测站点k的取车需求时,将t时刻站点k的取车订单数量、订单平均取车间隔、订单平均时长及订单平均价格输入至用户取车需求预测模型,得到t时刻站点k的取车订单预测值(即取车需求);在t时刻预测站点k的还车需求时,将t时刻站点k的还车订单数量、订单平均取车间隔、订单平均时长及订单平均价格输入至用户还车需求预测模型,得到t时刻站点k的还车订单预测值(即还车需求)。
95.需要说明的是,用户需求预测模型的预测结果作为多个站点的真实订单需求使用。
96.作为一种可选的实施例,根据用户需求预测模型的当前预测结果及多个站点的当前站点情况,确定多个站点的当前站点状态,包括:
97.判断目标站点的当前可用车辆数量是否能够满足目标站点当前的取车需求;其中,目标站点为任一站点;
98.若能够满足,则确定目标站点当前为可用车辆盈余站点;
99.若不能够满足,则确定目标站点当前为可用车辆不足站点;
100.判断目标站点是否有充电桩;
101.若有充电桩,则确定目标站点为有桩站点;
102.若无充电桩,则确定目标站点为无桩站点,并判断目标站点当前是否有待充电车辆;
103.若有待充电车辆,则确定目标站点当前为无桩有充电需求站点;
104.若无待充电车辆,则确定目标站点当前为无桩无充电需求站点。
105.具体地,本技术的车辆调度区域内多个站点的当前站点状态的识别分类原理为(参照图3):以目标站点(车辆调度区域内任一站点)为例,一方面,判断目标站点的当前可用车辆数量是否能够满足目标站点当前的取车需求;若能够满足目标站点当前的取车需求,则确定目标站点当前为可用车辆盈余站点;若无法满足目标站点当前的取车需求,则确定目标站点当前为可用车辆不足站点。另一方面,判断目标站点是否有充电桩;若有充电桩,则确定目标站点为有桩站点;若无充电桩,则确定目标站点为无桩站点,并判断目标站点当前是否有待充电车辆;若有待充电车辆,则确定目标站点当前为无桩有充电需求站点;若无待充电车辆,则确定目标站点当前为无桩无充电需求站点,从而识别分类出车辆调度区域内的可用车辆盈余站点、可用车辆不足站点、有桩站点、无桩有充电需求站点及无桩无充电需求站点。
106.更具体地,以车辆调度区域内t时刻的站点k为例,判断目标站点的当前可用车辆数量是否能够满足目标站点当前的取车需求的过程包括:判断t时刻站点k的取车订单预测值是否大于等于t时刻站点k的可用车辆数量若大于等于,则确定t时刻站点k的可用车辆数量无法满足t时刻站点k的取车需求,从而确定目标站点当前为可用车辆不足站点;若不大于等于,则确定t时刻站点k的可用车辆数量能够满足t时刻站点k的取车需求,从而确定目标站点当前为可用车辆盈余站点。
107.作为一种可选的实施例,目标站点当前的可用车辆和待充电车辆的确定过程,包括:
108.判断第一共享电动汽车的当前电池剩余电量是否小于预设电量阈值;其中,第一共享电动汽车为目标站点内任一共享电动汽车;
109.若是,则确定第一共享电动汽车当前为待充电车辆;
110.若否,则确定第一共享电动汽车当前为可用车辆。
111.具体地,本技术的目标站点当前的车辆识别分类过程包括:以第一共享电动汽车(目标站点内任一共享电动汽车)为例,判断第一共享电动汽车的当前电池剩余电量(用soc(电动汽车荷电状态,单位为%)表示)是否小于预设电量阈值若小于预设电量阈值,则确定第一共享电动汽车当前为待充电车辆;若不小于预设电量阈值,则确定第一共享电动汽车当前为可用车辆,从而识别分类出目标站点内的待充电车辆和可用车辆。
112.作为一种可选的实施例,在满足车辆调度区域当前的取车需求、还车需求及车辆充电需求的约束条件下,规划出可用车辆盈余站点调往可用车辆不足站点的可用车辆数量,及无桩有充电需求站点调往有桩站点的待充电车辆数量,包括:
113.在车辆调度区域内进行本轮车辆调度过程中,确定共享电动汽车因本轮车辆调度对应产生的最小碳排放的目标函数对应产生的最小碳排放的目标函数对应产生的最小碳排放的目标函数其中,为t时刻发起的车辆调度任务中可用车辆盈余站点i调往可用车辆不足站点j的可用车辆数量;为t时刻发起的车辆调度任务中无桩有充电需求站点m调往有桩站点n的待充电车辆数量;efom为电量边际排放因子;efbm为容量边际排放因子;e
power
为共享电动汽车的百公里耗电量;i
t
为t时刻可用车辆盈余站点集合;j
t
为t时刻可用车辆不足站点集合;为可用车辆盈余站点i到可用车辆不足站点j的行驶里程;m
t
为t时刻无桩有充电需求站点集合;n
t
为t时刻有桩站点集合;为无桩有充电需求站点m到有桩站点n的行驶里程;
114.在满足车辆调度区域在本轮车辆调度的取车需求、还车需求、车辆充电需求及调度时长的约束条件下,对目标函数进行最优求解,得到本轮车辆调度下可用车辆盈余站点调往可用车辆不足站点的可用车辆数量,及无桩有充电需求站点调往有桩站点的待充电车辆数量。
115.具体地,可以理解的是,在上述车辆和站点状态识别分类的基础上,本技术提出的车辆调度基本执行策略为:将可用车辆盈余站点的可用车辆调度至可用车辆不足站点以满足用户出行需求,将无桩有充电需求站点的待充电车辆调度至有桩站点以满足车辆充电需求。
116.基于本技术所提出的车辆调度基本执行策略,两类决策变量定义如下:
117.1)(z为整数):t时刻发起的车辆调度任务中可用车辆盈余站点i调往可用车辆不足站点j的可用车辆数量;
118.2)t时刻发起的车辆调度任务中
无桩有充电需求站点m调往有桩站点n的待充电车辆数量。
119.尽管共享电动汽车行驶过程不产生碳排放,但其正常工作需要消耗电能,而电能生产过程会产生碳排放。在国内电力能源市场背景下,发电能源来自化石燃料或可再生能源,因而本技术考虑的共享电动汽车碳排放指的是其行驶耗电在生产过程所产生的碳排放。计算共享电动汽车所耗电能在生产过程产生的碳排放carbon emissions需要用到efom(emission factor of operation margin,电量边际排放因子)和efbm(emission factor of building margin,容量边际排放因子),数学关系为:
120.其中,对于某一给定的电网供电区域,某一时期的efom和efbm为固定值,由供电公司公布;e
con
为共享电动汽车耗电量;
121.进一步地,共享电动汽车行驶耗电与其电池容量和最大续航相关,这里采用共享电动汽车百公里耗电量e
power
建立共享电动汽车任意行驶里程distance和耗电量e
con
间的数学关系,如下:
122.其中,共享电动汽车百公里耗电量e
power
由共享电动汽车生产厂家公布;
123.最后,得到共享电动汽车碳排放与对应行驶里程间的数学关系,如下:
[0124][0125]
车辆调度模型中,决策变量与行驶里程间的数学关系如下:
[0126][0127]
其中,i
t
为t时刻可用车辆盈余站点集合;j
t
为t时刻可用车辆不足站点集合;为可用车辆盈余站点i到可用车辆不足站点j的行驶里程;m
t
为t时刻无桩有充电需求站点集合;n
t
为t时刻有桩站点集合;为无桩有充电需求站点m到有桩站点n的行驶里程;
[0128]
考虑到车辆调度成本和环境效益,每轮调度的车辆行驶总里程和碳排放总量应最优(最少),则在车辆调度区域内进行本轮车辆调度过程中,确定共享电动汽车因本轮车辆调度对应产生的最小碳排放的目标函数为:
[0129][0130]
基于此,在满足车辆调度区域在本轮车辆调度的取车需求、还车需求、车辆充电需求及调度时长的约束条件下,对目标函数进行最优求解(车辆行驶总里程和碳排放总量最少下的和),得到本轮车辆调度下可用车辆盈余站点调往可用车辆不足站点的可用车辆数量,及无桩有充电需求站点调往有桩站点的待充电车辆数量。
[0131]
作为一种可选的实施例,在满足车辆调度区域在本轮车辆调度的取车需求、还车
需求、车辆充电需求及调度时长的约束条件下,对目标函数进行最优求解,得到本轮车辆调度下可用车辆盈余站点调往可用车辆不足站点的可用车辆数量,及无桩有充电需求站点调往有桩站点的待充电车辆数量,包括:
[0132]
预先建立可用车辆盈余站点的取车需求约束条件预先建立可用车辆盈余站点的取车需求约束条件及可用车辆不足站点的取车需求约束条件其中,为t时刻位于站点k的共享电动汽车总数量;为t时刻站点k的取车订单预测值;为站点k调出的可用车辆总数量;为站点k调入的可用车辆总数量;
[0133]
建立可用车辆盈余且有桩站点的还车需求约束条件建立可用车辆盈余且有桩站点的还车需求约束条件可用车辆盈余且无桩有充电需求站点的还车需求约束条件可用车辆盈余且无桩无充电需求站点的还车需求约束条件盈余且无桩无充电需求站点的还车需求约束条件可用车辆不足且有桩站点的还车需求约束条件可用车辆不足且无桩有充电需求站点的还车需求约束条件需求站点的还车需求约束条件及可用车辆不足且无桩无充电需求站点的还车需求约束条件其中;limitk为站点k的停车位总数量;为t时刻站点k的还车订单预测值;为站点k调入的待充电车辆总数量;为站点k调出的待充电车辆总数量;
[0134]
建立待充电车辆的充电需求约束条件其中,为t时刻站点k的待充电车辆总数量;
[0135]
建立单轮车辆调度的调度时长约束条件ifthen其中,为t时刻共享电动汽车从站点i行驶至站点j的调度时长;为预设调度限定时长;
[0136]
在满足车辆调度区域在本轮车辆调度的取车需求、还车需求、车辆充电需求及调度时长的约束条件下,对目标函数进行最优求解,得到本轮车辆调度下可用车辆盈余站点调往可用车辆不足站点的可用车辆数量,及无桩有充电需求站点调往有桩站点的待充电车辆数量。
[0137]
具体地,本技术的车辆调度区域的约束条件建立原理为:
[0138]
取车需求约束条件:t至t δt的用户取车需求应被完全满足,因而要求调度结束
后车辆调度区域内各站点的可用车辆数量相应大于等于各站点的用户取车订单数量,具体如下:
[0139]
1)对于可用车辆盈余站点:
[0140][0141]
2)对于可用车辆不足站点:
[0142][0143]
还车需求约束条件:t至t δt的用户还车需求应被完全满足,因而要求调度结束后车辆调度区域内各站点的可用停车位数量相应大于等于各站点的用户还车订单数量,具体如下:
[0144]
3)对于可用车辆盈余且有桩站点:
[0145][0146]
4)对于可用车辆盈余且无桩有充电需求站点:
[0147][0148]
5)对于可用车辆盈余且无桩无充电需求站点:
[0149][0150]
6)对于可用车辆不足且有桩站点:
[0151][0152]
7)对于可用车辆不足且无桩有充电需求站点:
[0153][0154]
8)对于可用车辆不足且无桩无充电需求站点:
[0155][0156]
上式1-8中,为t时刻位于站点k的共享电动汽车总数量(包括可用车辆和待充电车辆,辆);limitk为站点k的停车位总数量;为站点k调出的可用车辆总数量;为站点k调入的可用车辆总数量;为站点k调入的待充电车辆总数量;为站点k调出的待充电车辆总数量。
[0157]
充电需求约束条件:车辆调度区域内所有待充电车辆的充电需求应得到满足,因而要求调度结束后车辆调度区域内各无桩站点的待充电车辆全部被调度至有桩站点,即:
[0158]
其中,为t时刻站点k的待充电车辆总数量。
[0159]
调度时长约束条件:单轮车辆调度被限定在预设调度限定时长(如15min)内完成,即调度时长超过调度限定时长的调度路线应予以取消,以避免影响用户出行需求:
[0160]
ifthen其中,为t时刻共享电动汽车从站点i行驶至站点j的调度时长(分钟);为预设调度限定时长。
[0161]
基于此,在满足车辆调度区域在本轮车辆调度的取车需求、还车需求、车辆充电需求及调度时长的约束条件下,对目标函数进行最优求解,得到本轮车辆调度下可用车辆盈余站点调往可用车辆不足站点的可用车辆数量,及无桩有充电需求站点调往有桩站点的待充电车辆数量。
[0162]
更具体地,本技术的约束条件下的目标函数为线性整数规划模型,线性整数规划模型相关的求解算法包括分支定界、割平面法和启发式智能算法等,考虑到gurobi(一种求解软件)在求解线性整数规划模型方面的高效便捷性,本技术的目标函数采用gurobi进行最优求解。
[0163]
作为一种可选的实施例,多个站点的共享电动汽车划分为电池剩余电量小于预设电量阈值的待充电车辆和电池剩余电量不小于预设电量阈值的可用车辆;
[0164]
共享电动汽车的调度方法还包括:
[0165]
若目标函数不可解,则将电量阈值减去预设电量变化量,得到新电量阈值,以基于新电量阈值更新共享电动汽车的划分结果及多个站点的站点状态,而后重新执行在满足车辆调度区域在本轮车辆调度的取车需求、还车需求、车辆充电需求及调度时长的约束条件下,对目标函数进行最优求解的步骤,直至求得目标函数的最优解。
[0166]
进一步地,在进行目标函数求解时,考虑到可能出现某一时刻车辆调度区域内可用充电桩无法同时满足所有待充电车辆补电需求导致目标函数不可解的情况,此时需要确定车辆的补电优先顺序。本技术考虑soc越低车辆的补电需求越迫切的实际情况,提出以下基于soc水平确定车辆充电优先顺序的方法(参照图4):
[0167]
step1:设定初始soc阈值
[0168]
step2:结合车辆调度区域内各站点停放车辆的实时剩余电量与的比较结果,对各站点停放车辆进行可用车辆群体和待充电车辆群体的划分或更新,并根据各站点内是否停放有待充电车辆进一步对无桩站点进行有充电需求和无充电需求的划分或更新;
[0169]
step3:基于车辆调度区域内车辆和站点的状态分类结果,考虑用户取车需求、还车需求及车辆充电需求,建立或更新车辆调度区域内各站点的车辆调度约束条件;
[0170]
step4:对构建的线性整数规划模型进行求解;如果模型可解,则输出最优调度方案;如果模型不可解,则调整返回step2,迭代进行直到模型可解并输出最优解;其中,δsoc为预设电量变化量。
[0171]
对模型进行迭代求解的核心步骤为:当模型不可解时,调整对模型进行迭代求解的核心步骤为:当模型不可解时,调整即将原本待充电群体中电量水平较高的车辆重新确定为可用车辆,从而缩减待充电车辆群体数量,也即率先放弃对剩余电量较高车辆充电需求的满足,从而实现对于电量较低车辆充电需求的优先满足。
[0172]
综上,如图5所示,车辆调度区域全天滚动自适应动态车辆调度的原理为:
[0173]
当t=nδt(n∈n)时判断车辆调度区域是否需要触发车辆调度任务,具体判断方法为:基于lstm建立用户需求预测模型并输出用户在t时刻的取车需求和还车需求;结合用户需求预测结果和车辆实时电量进行车辆和站点状态的判断、标定;判断车辆调度区域内是否存在可用车辆不足站点或无桩站点内是否存在待充电车辆,若否,则此时间间隔内不触发车辆调度任务;若是,则触发本轮车辆调度任务,进而考虑用户取车、还车需求和车辆充电需求建立碳排放最低模型,并基于gruobi求解器并结合补电优先度方法输出本轮最优调度方案,并等待下一轮车辆调度任务的触发。
[0174]
给出一个具体案例进行车辆调度原理分析:
[0175]
研究案例为共享电动汽车运营商evcard位于上海市嘉定区的部分运营站点。为了实现区域内部调度自平衡,将其运营区域以半径为7km的正六边形进行划分(如图6所示),并将图6中标记为“z”的正六边形作为本次案例研究区域以说明本技术所提出车辆调度策略的有效性,其中,标记为“z”的正六边形区域包含43个站点(21个有桩站点和22个无桩站点)和187辆共享电动汽车,站点位置分布如图7所示。
[0176]
收集到研究区域内各站点在2016年1月1日0:00至2016年2月3日24:00期间的历史订单数据(共计34天,56377条原始订单数据)。调度仿真执行时间t选取为2016年2月3日上午9点,调度任务执行时间间隔δt取为2h。车辆有无充电需求的判断阈值初始设为0.5,迭代步长δsoc取0.05。考虑到共享电动汽车运营商evcard目前有多种车型同时面向用户提供服务,故其百公里电耗e
power
取平均值12.52kwh/100km。调度过程车辆行驶速度按30km/h取值。考虑到研究区域属于华东地区,故efom和efbm按照华东区域电网2016公布数值分别为0.8086和0.5483。
[0177]
lstm用户需求预测模型的训练基于windows系统python3.4实现,构建包括两个lstm隐藏层的预测模型,并在输入层和第一个隐藏层之间添加droupout层以避免模型对训练数据过拟合,droupout率取0.5,学习率取0.0005,batchsize(批尺寸)取64,迭代次数取500。此外,为提高模型预测准确度,利用窗口方法使用多个特征最近的时间项作为输入特征进行下一时间项的预测,窗口大小取为10。
[0178]
模型输出结果—用户需求预测结果和站点状态标记结果:
[0179]
43个站点的用户取车需求和还车需求预测结果如下表1所示,
[0180]
表1
[0181]
[0182]
[0183][0184]
用户取车需求和还车需求的预测均方根误差(root mean squared error,rmse)分别为1.06和0.78。比较各站点可用车辆数量和用户取车订单数量,将站点划分为16个可用车辆不足站点和27个可用车辆盈余站点。比较车辆实时soc和将共计49辆共享电动汽车标记为待充电车辆,并将13个无桩站点标记为无桩有充电需求站点。
[0185]
站点间车辆调度方案—根据模型输出结果,本轮最优车辆调度方案如下表2所示:
[0186]
表2
[0187]
[0188][0189]
如表2所示,为满足用户取车需求,需要将共计29辆可用车辆从盈余站点调度至可用车辆不足站点。为满足待充电车辆补电需求,需要将共计28辆电量低于50%的待充电车辆从无桩站点调度至有桩站点。同时,按照如上调度方案,可同时满足各站点的用户还车需求。
[0190]
输出结果显示,本轮模型求解时长为0.03s,最优调度方案下的车辆行驶总里程为86.46km,碳排放总量为7344.08g。
[0191]
调度效果评价:
[0192]
分别计算调度前后用户取车订单满足率和还车订单满足率以定量展示本轮调度方案对于系统服务水平的提升程度。同时引入mbe(mean balancing error),即系统整体不均衡指数评价模型对于各站点间的车辆分布不均衡效果的缓解程度,计算公式如下:
[0193]
其中,k为研究区域内站点总数量。
[0194]
结果如下表3所示:
[0195]
表3
[0196][0197][0198]
*假设用户需求预测结果为用户真实订单需求
[0199]
结果表明:不执行车辆调度会导致研究区域内9-11点期间的27个取车订单和18个还车订单被拒绝,而执行本模型所确定的调度方案,能够满足所有用户的订单需求,因而调度任务的执行显着提高了系统服务水平。同时,执行车辆调度后的mbe由0.344降为0.1874,表明本轮车辆调度有效缓解了各站点的车辆分布不均衡状态。
[0200]
结论:
[0201]
按照本技术所提策略进行车辆调度,能够同时满足研究区域内所有站点的用户取车订单和还车订单,并有效缓解了系统车辆分布不均衡状态,同时,还满足了待充电车辆的补电需求。此外,模型优化求解时间为0.03s,足够满足现实场景下实时调度的求解时效性要求。
[0202]
综上,本技术所提出的车辆调度策略基于用户需求预测,考虑用户出行需求,从而保证车辆调度能够有效满足用户取车需求和还车需求,提升了车辆调度效率和用户出行体验。同时,本技术所提出的车辆调度策略考虑了共享电动汽车充电需求,并提出了基于soc水平确定补电优先顺序的模型迭代求解方法,能够有效满足共享电动汽车的充电需求,改善了车辆充电体验。另外,本技术基于正六边形分区将车辆调度问题建立为整数线性规划模型,结合gurobi能够实现对模型的快速求解,并保证单轮车辆调度能够在15min内快速完成,最终实现无人驾驶共享电动汽车的全天滚动自适应动态调度。
[0203]
请参照图8,图8为本发明实施例提供的一种共享电动汽车的调度系统的结构示意图。
[0204]
该共享电动汽车的调度系统应用于包含多个共享电动汽车的站点的车辆调度区域,包括:
[0205]
调度触发模块1,用于在根据预设车辆调度触发策略判定出车辆调度区域当前需要触发车辆调度任务时,根据多个站点的当前站点状态,得到多个站点中的有桩站点、无桩有充电需求站点、可用车辆盈余站点及可用车辆不足站点;
[0206]
调度规划模块2,用于在满足车辆调度区域当前的取车需求、还车需求及车辆充电需求的约束条件下,规划出可用车辆盈余站点调往可用车辆不足站点的可用车辆数量,及无桩有充电需求站点调往有桩站点的待充电车辆数量;
[0207]
调度执行模块3,用于根据可用车辆数量和待充电车辆数量确定待调度的目标共享电动汽车及目标共享电动汽车的站点调度任务,并将站点调度任务相应下发至目标共享电动汽车,以使目标共享电动汽车进入无人驾驶模式并自主完成站点调度任务。
[0208]
本技术提供的调度系统的介绍请参考上述调度方法的实施例,本技术在此不再赘述。
[0209]
本技术还提供了一种共享电动汽车的调度设备,包括:
[0210]
存储装置,用于存储计算机程序;
[0211]
处理装置,用于在执行计算机程序时实现上述任一种共享电动汽车的调度方法的步骤。
[0212]
本技术提供的调度设备的介绍请参考上述调度方法的实施例,本技术在此不再赘述。
[0213]
还需要说明的是,在本说明书中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作
之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
[0214]
对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其他实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。