1.本技术涉及地图制作领域,更具体地,涉及一种生成几何路网的方法、装置、设备及存储介质。
背景技术:
2.随着经济的快速发展,城市道路路网更新迅速,道路路网数据对于交通规划和城市发展具有重要意义。道路的几何路网信息是制作地图的一个非常重要的信息,在创建当前一些主流地图未覆盖的区域的地图时,需要获取该区域道路的几何路网信息。因此,在地图制作领域中,存在获取地图未覆盖区域道路几何路网信息的问题。
技术实现要素:
3.本技术提出了一种生成几何路网的方法、装置、设备及存储介质,以改善上述问题。
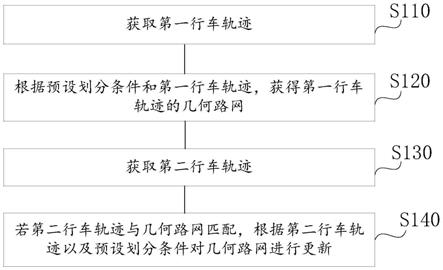
4.第一方面,本技术实施例提供了一种生成几何路网的方法,该方法包括:获取第一行车轨迹;根据预设划分条件和所述第一行车轨迹,获得所述第一行车轨迹的几何路网;获取第二行车轨迹:若所述第二行车轨迹与所述几何路网匹配,根据所述第二行车轨迹以及所述预设划分条件对所述几何路网进行更新。
5.第二方面,本技术实施例还提供了一种生成几何路网的装置,该装置包括:第一行车轨迹获取单元、几何路网生成单元、第二行车轨迹获取单元以及几何路网更新单元。其中,第一行车轨迹获取单元,用于获取第一行车轨迹;几何路网生成单元,用于根据预设划分条件和所述第一行车轨迹,获得所述第一行车轨迹的几何路网;第二行车轨迹获取单元,用于获取第二行车轨迹:几何路网更新单元,用于若所述第二行车轨迹与所述几何路网匹配,根据所述第二行车轨迹以及所述预设划分条件对所述几何路网进行更新。
6.第三方面,本技术实施例还提供了一种电子设备,包括:一个或多个处理器、存储器以及一个或多个应用程序。其中,所述一个或多个应用程序被存储在所述存储器中并被配置为由所述一个或多个处理器执行,所述一个或多个程序配置执行以实现如上述第一方面所述的方法。
7.第四方面,本技术实施例还提供了一种计算机可读存储介质,所述计算机可读存储介质中存储有程序代码,所述程序代码可被处理器调用执行如上述第一方面所述的方法。
8.本技术提供的技术方案,通过获取第一行车轨迹;根据预设划分条件和所述第一行车轨迹,获得所述第一行车轨迹的几何路网;获取第二行车轨迹:若所述第二行车轨迹与所述几何路网匹配,根据所述第二行车轨迹以及所述预设划分条件对所述几何路网进行更新。因此,采用本技术的上述方法,基于行车轨迹数据,快速高效地自动生成几何路网,提高了获取地图未覆盖区域道路几何路网信息的效率。
附图说明
9.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
10.图1示出了本技术一实施例提供的一种生成几何路网的方法的流程示意图;
11.图2示出了本技术一实施例中的行车轨迹的角度偏差;
12.图3示出了本技术一实施例中的行车轨迹的距离偏差;
13.图4示出了本技术一实施例中的第一行车轨迹;
14.图5示出了根据本技术图4所示的第一行车轨迹获得的几何路网;
15.图6示出了本技术一实施例中的第二行车轨迹;
16.图7示出了本技术图6所示的第二行车轨迹对图5所示的几何路网更新后获得的目标几何路网;
17.图8示出了本技术一实施例提供的一种生成几何路网的装置的结构框图;
18.图9示出了本技术一实施例提供的一种电子设备的结构框图;
19.图10示出了本技术一实施例提供的一种生成几何路网的方法的应用场景示意图;
20.图11示出了本技术一实施例提供的一种计算机存储介质的结构框图。
具体实施方式
21.为了使本技术领域的人员更好地理解本技术方案,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
22.随着社会经济水平的发展,交通道路的更新频率也呈现加速之势,而建立全面的道路信息路网是建设智能交通、数字城市、智慧城市的基本前提。传统的测绘手段成本高昂,且更新周期长,如何实现道路路网快速有效的更新,已成为智能交通、智慧城市建设的关键问题之一。
23.相关技术中,在刚创建当前主流地图未覆盖的区域的地图时,需要获取的该区域的众包数据,尤其是这些当前主流地图未覆盖区域的道路的几何路网信息。在自动驾驶领域中,高精度地图是实现安全自动驾驶的重要技术,而高精度地图大多是根据众包数据编辑获得的。其中,众包数据为不同车型的车辆提供的该车辆实时采集的该车辆的位姿数据、摄像头数据、激光雷达数据、gps轨迹数据;当前主流未覆盖的区域可以是高速公路、城市道路、各类停车场等场景的区域。相关技术中,已出现利用gps轨迹数据更新道路信息的方法,不过该技术是在道路基本几何路网信息已知并且该路段gps信号良好的前提下完成道路信息更新。因此,在地图制作领域中,存在获取地图未覆盖区域道路几何路网信息的问题。
24.为了缓解上述问题,本技术的发明人提出了本技术提供的一种生成几何路网的方法、装置、设备及存储介质。通过获取第一行车轨迹;根据预设划分条件和所述第一行车轨迹,获得所述第一行车轨迹的几何路网;获取第二行车轨迹:若所述第二行车轨迹与所述几何路网匹配,根据所述第二行车轨迹以及所述预设划分条件对所述几何路网进行更新。因
此,采用本技术的上述方法,基于廉价可得的行车轨迹快速高效地自动生成道路的几何路网信息,以便用户获取地图未覆盖区域道路的几何路网信息创建该区域的地图。
25.下面将结合附图具体描述本技术的各实施例。
26.请参阅图1,本技术一实施例提供了一种生成几何路网的方法,本实施例描述的是终端设备侧的步骤流程,所述方法可以包括步骤s110至步骤s140。
27.步骤s110:获取第一行车轨迹。
28.在本技术实施例中,所述获取第一行车轨迹,可以是获取预先存储在所述终端设备的存储单元的第一行车轨迹,也可以通过无线通信技术(如wifi、蓝牙、zigbee技术)从相关联的云端或电子设备获得第一行车轨迹,还可以是通过spi(串口通信接口)从相关联的电子设备获得第一行车轨迹。所述第一行车轨迹可以是不同车型的车辆在高速公路、城市道路、各类停车场等场景下的单车次行车轨迹,也可以是各类移动机器人的单次行动轨迹。
29.应当理解,用于生成的几何路网的轨迹不限于车辆的轨迹、移动机器人的移动轨迹,也可以是其他设备的移动轨迹,在此不作限定。
30.步骤s120:根据预设划分条件和所述第一行车轨迹,获得所述第一行车轨迹的几何路网。
31.在本技术实施中,所述根据预设划分条件和所述第一行车轨迹,获得所述第一行车轨迹的几何路网可以是,根据预设划分条件和所述第一行车轨迹的轨迹点,获得所述第一行车轨迹的多个第一分段节点;根据各所述第一分段节点,获得所述第一行车轨迹的几何路网。
32.具体地,根据预设划分条件和所述第一行车轨迹的轨迹点,获得所述第一行车轨迹的多个第一分段节点,可以是获取第一行车轨迹中的两个端点,将该两个端点连接形成第一直线;获取所述第一行车轨迹中到所述第一直线距离最远的第一轨迹点,计算所述第一轨迹点与所述第一直线之间的第一距离;获取所述第一轨迹点与所述两个端点分别连接后与所述第一直线形成的两个夹角;若所述第一距离大于预设距离偏差阈值,或存在一个夹角大于预设角度偏差阈值,则满足预设划分条件,将所述第一轨迹点作为一个第一分段节点;将该第一分段节点与所述两个端点之间的行车轨迹作为新的第一行车轨迹并返回执行获取第一行车轨迹中的两个端点,将该两个端点连接形成第一直线的步骤,直至所述第一距离不大于所述预设距离偏差阈值且不存在夹角大于所述预设角度偏差阈值时,得到多个第一分段节点。
33.其中,所述预设划分条件可以是预先存储在设备终端的,也可以是通过无线通信技术从相关联的云端或电子设备获得的,还可以是通过spi从相关联的电子设备获得的。具体的,预设划分条件可以是行车轨迹中的轨迹点到该行车轨迹两端点形成的直线的距离大于预设距离偏差阈值,且所述轨迹点与所述两端点分别连接后与所述直线之间的两夹角中存在一夹角大于预设角度偏差阈值;也可以是行车轨迹中的轨迹点到该行车轨迹两端点形成的直线的距离大于预设距离偏差阈值,或所述轨迹点与所述两端点分别连接后与所述直线之间的两夹角中存在一夹角大于预设角度偏差阈值。在满足预设划分条件后,将满足预设划分条件的轨迹点作为一个该行车轨迹的分段节点。
34.所述预设划分条件涉及到的预设距离偏差阈值、预设角度偏差阈值可以是预先存储在设备终端的,也可以是通过无线通信技术从相关联的云端或电子设备获得的,还可以
是通过spi从相关联的电子设备获得的;具体的预设距离偏差阈值和预设角度偏差阈值的大小可以是用户自主设定的,也可以是通过第三方实验数据获得的。如,预设距离偏差阈值大小为1000米,通过第三方实验数据获得存储在设备终端中;预设角度偏差阈值大小为75
°
,通过第三方实验数据获得存储在设备终端中。
35.示例性的,预设条件为行车轨迹中的轨迹点到该行车轨迹两端点形成的直线的距离大于预设距离偏差阈值,或所述轨迹点与所述两端点分别连接后与所述直线之间的两夹角中存在一夹角大于预设角度偏差阈值,则满足预设划分条件。
36.请参阅图2,图2示出了行车轨迹的角度偏差。其中,某一车辆的行车轨迹(或某一机器人的行动轨迹)如图2中的曲线ab所示,连接行车轨迹ab的两端点a、b得到直线ab,该行车轨迹ab中轨迹点f到直线ab的距离最远,获取该轨迹点f与行车轨迹ab的两个a、b端点分别连接后与直线ab形成的两个夹角∠1、∠2的大小,∠1、∠2即为行车轨迹ab的角度偏差,将∠1和∠2分别与预设角度偏差阈值比较,若∠1或者∠2大于该预设角度偏差阈值,轨迹点f则满足预设划分条件,将轨迹点f作为轨迹ab的一个分段节点划分行车轨迹ab,获得轨迹af、轨迹fb。
37.请参阅图3,图3示出了行车轨迹的距离偏差。其中,某一车辆的行车轨迹(或某一机器人的行动轨迹)如图3中的曲线cd所示,连接行车轨迹cd的两端点c、d得到直线cd,该行车轨迹cd中轨迹点e到直线cd的距离最远,获取轨迹点e到直线cd的距离dmax,dmax即为行车轨迹cd的距离偏差,若dmax大于预设距离偏差阈值,轨迹点e则满足预设划分条件,将轨迹点e作为行车轨迹cd的一个分段节点划分行车轨迹cd,获得轨迹ce、轨迹ed。
38.示例性的,预设划分条件为行车轨迹中的轨迹点到该行车轨迹两端点形成的直线的距离大于预设距离偏差阈值,且所述轨迹点与所述两端点分别连接后与所述直线之间的两夹角中存在一夹角大于预设角度偏差阈值,则满足预设划分条件。
39.请参阅图4,第一行车轨迹(或某一机器人的行动轨迹)如图4中的曲线ab所示。获取第一行车轨迹ab中的两个端点a、b,将该两个端点a、b连接形成第一直线ab,计算第一行车轨迹ab中的轨迹点(例如,c、d、e、f、g等)与第一直线ab的距离;获取第一行车轨迹ab中到第一直线ab距离最远的第一轨迹点,如该第一轨迹点为轨迹点d;获得第一轨迹点d与第一直线ab之间的第一距离dmax1;获取第一轨迹点d与第一行车轨迹ab的两个端点a、b分别连接后与第一直线ab形成的两个夹角∠3、∠4的大小;若第一距离dmax1大于预设距离偏差阈值,且∠3或者∠4大于预设角度偏差阈值,则满足预设划分条件,将第一轨迹点d作为第一行车轨迹ab的一个第一分段节点将第一行车轨迹ab划分,得到轨迹ad和轨迹db。
40.将第一分段节点d与第一行车轨迹ab的两个端点a、b之间的行车轨迹(轨迹ad、轨迹db)分别作为新的第一行车轨迹并返回执行获取第一行车轨迹中的两个端点,将该两个端点连接形成第一直线的步骤,直至所述第一距离不大于所述预设距离偏差阈值且不存在夹角大于所述预设角度偏差阈值时,得到多个第一分段节点。最后得到的多个第一分段节点为轨迹点a、轨迹点d、轨迹点e以及轨迹点b,各第一分段节点在第一行车轨迹ab的位置如图4所示。
41.在本技术实施例中,所述根据各所述第一分段节点,获得所述第一行车轨迹的几何路网,可以是按照各所述第一分段节点对应在第一行车轨迹上的行进顺序,将各所述第一分段节点依次连接,得到所述第一行车轨迹的几何路网。所述行进顺序为第一行车轨迹
对应的车辆在高速公路、城市道路、各类停车场等场景下的行进顺序,或第一行车轨迹对应的移动机器人在不同场景下的移动行进顺序。
42.请参阅图5和图4,图5示出了根据图4所示的第一行车轨迹获得的几何路网的示意图。根据如图4所示的第一行车轨迹ab获得该第一行车轨迹ab的多个第一分段节点(轨迹点a、轨迹点d、轨迹点e、轨迹点b)后;按照各第一分段节点对应在第一行车轨迹上的行进顺序(a
→d→e→
b或者b
→e→d→
a),将完整的第一行车轨迹ab各第一分段节点依次连接,得到第一行车轨迹ab的几何路网a
→d→e→
b(或b
→e→d→
a),如图5所示。
43.步骤s130:获取第二行车轨迹。
44.在本技术实施例中,所述获取第二行车轨迹,可以是获取预先存储在所述终端设备的存储单元的第二行车轨迹,也可以通过无线通信技术(如wifi、蓝牙、zigbee技术)从相关联的云端或电子设备获得第二行车轨迹,还可以是通过spi(串口通信接口)从相关联的电子设备获得第二行车轨迹。所述第二行车轨迹可以是不同车型的车辆在高速公路、城市道路、各类停车场等场景下的单车次行车轨迹,也可以是各类移动机器人的单次行动轨迹。
45.需要说明的是,第二行车轨迹的对应的车型可以与第一行车轨迹对应的车型相同,也可以不同,可以是同一辆车的行车轨迹,也可以不是;第二行车轨迹的对应的移动机器人可以与第一行车轨迹对应的移动机器人同类型,也可以不同类型,可以是同一移动机器人,也可不是。
46.步骤s140:若所述第二行车轨迹与所述几何路网匹配,根据所述第二行车轨迹以及所述预设划分条件对所述几何路网进行更新。
47.其中,所述第二行车轨迹对已生成的几何路网迭代更新、生成第二行车轨迹对应的几何路网无路网部分的几何路网。具体地,第二行车轨迹对应的几何路网,即与所述第二行车轨迹匹配的几何路网;生成第二行车轨迹对应的几何路网无路网部分的几何路网,即对所述第二行车轨迹与已生成的几何路网匹配剩余部分进行路网分段形成新的几何路网,并在匹配分段处将第二行车轨迹与已生成的几何路网匹配的剩余部分形成的几何路网跟已生成的几何路网进行关联。
48.在一些实施方式中,所述第二行车轨迹与所述几何路网匹配,可以是,根据预设划分条件和所述第二行车轨迹获得所述第二行车轨迹的多个第二分段节点;将所述多个第二分段节点与现有几何路网匹配;若存在第二分段节点与现有几何路网的第一分段节点之间的距离小于预设距离阈值,所述第二分段节点与所述几何路网匹配;根据所述第二行车轨迹以及所述预设划分条件对所述几何路网进行更新。
49.具体的,根据预设划分条件和所述第二行车轨迹获得所述第二行车轨迹的多个第二分段节点,可以是获取第二行车轨迹中的两个端点,将该两个端点连接形成第二直线;获取所述第二行车轨迹中到所述第二直线距离最远的第二轨迹点,计算所述第二轨迹点与所述第二直线之间的第二距离;获取所述第二轨迹点与所述两个端点分别连接后与所述第二直线形成的两个夹角;若所述第二距离大于预设距离偏差阈值,或存在一个夹角大于预设角度偏差阈值,则满足预设划分条件,将所述第二轨迹点作为一个第二分段节点将该第二分段节点与所述两个端点之间的行车轨迹作为新的第二行车轨迹并返回执行获取第二行车轨迹中的两个端点,将该两个端点连接形成第二直线的步骤,直至所述第二距离不大于所述预设距离偏差阈值且不存在夹角大于所述预设角度偏差阈值时,得到多个第二分段节
点。
50.若所述第二行车轨迹与所述几何路网匹配,根据所述第二行车轨迹以及所述预设划分条件对所述几何路网进行更新,可以是若所述第二行车轨迹中存在与所述几何路网的第一分段节点之间的距离小于预设距离阈值的轨迹点,所述第二行车轨迹与所述几何路网匹配;根据预设划分条件和所述第二行车轨迹,获得所述第二行车轨迹的多个第二分段节点;根据所述第二分段节点中的目标分段节点对所述几何路网进行更新,所述目标分段节点为所述多个第二分段节点中到所述几何路网的各第一分段节点的最小距离大于预设距离阈值的第二分段节点。
51.其中,所述预设距离阈值可以是预先存储在设备终端的,也可以是通过无线通信技术从相关联的云端或电子设备获得的,还可以是通过spi从相关联的电子设备获得的;可以是由用户自主设定的,也可以是通过第三方实验数据获得的。如,所述预设距离阈值为20m是通过第三方实验数据获得的,预先存储在终端设备中。
52.具体地,所述第二行车轨迹对现有已生成的几何路网迭代更新包括:在已有几何路网上新增节点;若新增路网节点与已有几何路网节点距离小于预设距离阈值,将该新增节点删除、加权合并或将该新增节点对应的第一路网节点删除。
53.具体地,根据所述第二分段节点中的目标分段节点对所述几何路网进行更新,可以是按照各所述第二分段节点对应在第二行车轨迹上的行进顺序,依次连接各所述第二分段节点,得到所述第二行车轨迹的几何路网,将所述多个第二分段节点中到所述几何路网的各第一分段节点的最小距离大于预设距离阈值的目标分段节点的位置转换到与目标分段节点之间的距离小于预设距离阈值的位置,按照各所述第二分段节点对应在第二行车轨迹上的行进顺序,依次连接各所述第二分段节点,得到第一行车轨迹对应的几何路网的更新后的目标集合路网。
54.需要说明的是,所述目标分段节点为所述多个第二分段节点中到所述几何路网的各第一分段节点的最小距离大于预设距离阈值的第二分段节点。
55.在另一些实施方式中,若所述第二行车轨迹与所述几何路网匹配,根据所述第二行车轨迹以及所述预设划分条件对所述几何路网进行更新,可以是根据第二行车轨迹的起始的轨迹点,搜索几何路网中与该轨迹点距离最短的第一分段节点,若计算该轨迹点与该轨迹点距离最短的第一分段节点之间的距离小于预设距离阈值,确定所述第二行车轨迹与所述几何路网匹配;根据已有的几何路网的连接关系推算与所述第二行车轨迹匹配的下一第一分段节点;在第二行车轨迹上搜索与该下一第一分段节点最接近的轨迹点;若与该下一第一分段节点最接近的轨迹点与该下一第一分段节点的距离在预设距离阈值内,确定第二行车轨迹的起始的轨迹点到该下一第一分段节点最接近的轨迹点之间的轨迹与几何路网的上述两个第一分段节点之间的路段匹配;将第二行车轨迹与该几何路网匹配,直至第二行车轨迹与几何路网无匹配的几何路网,根据预设划分条件和第二行车轨迹与几何路网无几何路网匹配的剩余轨迹,获得多个目标分段节点,按照各与几何路网匹配的第二行车轨迹上的轨迹点以及各所述目标分段节点对应在第二行车轨迹上的行进顺序,依次连接各与几何路网匹配的第二行车轨迹上的轨迹点和各所述第二分段节点,得到对所述几何路网进行更新后的目标几何路网。
56.示例性的,请参阅图6和图7,其示出了第二行车轨迹对第一行车轨迹的几何路网
更新后获得的目标几何路网。第二行车轨迹如图6中的曲线hn所示,根据第一行车轨迹得到的几何路网如图6中的几何路网a
→d→e→
b所示。若所述第二行车轨迹hn与所述几何路网a
→d→e→
b匹配,根据所述第二行车轨迹hn以及所述预设划分条件对所述几何路网a
→d→e→
b进行更新。
57.首先,判断第二行车轨迹hn是否与第一行车轨迹的几何路网a
→d→e→
b匹配。具体地,判断过程可以是:先确定所述第二行车轨迹hn与所述几何路网a
→d→e→
b的起始的匹配点。如,利用线性最小二乘预测器搜索几何路网a
→d→e→
b上与所述第二行车轨迹hn的起始轨迹点h最接近的第一分段节点,若所述起始轨迹点h与几何路网上的第一分段节点a的之间距离小于预设距离阈值,则所述轨迹起始点h为起始的匹配点,即所述第二行车轨迹hn与所述几何路网a
→d→e→
b匹配。根据已有的几何路网a
→d→e→
b的连接关系推算与所述第二行车轨迹hn匹配的下一第一分段节点为第一分段节点d;在第二行车轨迹hn上搜索与第一分段节点d最接近的轨迹点,如,该轨迹点为第二行车轨迹hn上的轨迹点i;若所述轨迹点i与第一分段节点d的距离在预设距离阈值内,第二行车轨迹hn中的hi轨迹与几何路网a
→d→e→
b的a
→
d段匹配。
58.具体的,根据所述第二行车轨迹hn以及所述预设划分条件对所述几何路网a
→d→e→
b进行更新的过程可以是:根据预设划分条件和第二行车轨迹中的轨迹hn,获得多个第二分段节点(h、i、j、k、l、m、n),获取各第二分段节点与几何路网a
→d→e→
b的各第一分段节点(a、d、e、b)的之间的距离,获得各第二分段节点与几何路网a
→d→e→
b的距离最短的距离,如,第二分段节点h与第一分段节点a之间的距离ha、第二分段节点i与第一分段节点d之间的距离id、第二分段节点j与第一分段节点e之间的距离je、第二分段节点k与第一分段节点b之间的距离kb、第二分段节点l与第一分段节点b之间的距离lb、第二分段节点m与第一分段节点b之间的距离mb以及第二分段节点n与第一分段节点b之间的距离nb。若距离ha小于预设距离阈值、距离ha小于预设距离阈值、距离kb小于预设距离阈值,将第二分段节点h的位置转换为几何路网a
→d→e→
b的第一分段节点a、第二分段节点i的位置转换为几何路网a
→d→e→
b的第一分段节点d以及第二分段节点k的位置转换为几何路网a
→d→e→
b的第一分段节点b,按照各所述第二分段节点对应在第二行车轨迹上的行进顺序,依次连接各所述第二分段节点,得到对所述几何路网进行更新后的目标几何路网a
→d→
e(
→
j)
→b→
l
→m→
n。
59.获得多个第二分段节点(h、i、j、k、l、m、n)的过程可以是,获取第二行车轨迹hn两个端点h、n,将该两个端点连接形成第二直线hn;获取轨迹hn中到第二直线hn距离最远的第二轨迹点j,计算第二轨迹点j与第二直线hn之间的第二距离;获取第二轨迹点j与轨迹hn的两个端点h、n分别连接后与所述第二直线hn形成的两个夹角∠5、∠6;若所述第二距离大于预设距离偏差阈值,且∠5或者∠6大于预设角度偏差阈值,则满足预设划分条件,将第二轨迹点j作为一个第二分段节点;将该第二分段节点j与所述两个端点h、n之间的轨迹hj和轨迹jn分别作为新的第二行车轨迹并返回执行获取第二行车轨迹中的两个端点,将该两个端点连接形成第二直线的步骤,直至所述第二距离不大于所述预设距离偏差阈值且不存在夹角大于所述预设角度偏差阈值时,得到多个第二分段节点(h、i、j、k、l、m、n)。
60.其中,获得第二分段节点h距离几何路网a
→d→e→
b距离最近的第一分段节点a之间的距离ha、获得第二分段节点i距离几何路网a
→d→e→
b距离最近的第一分段节点d之间
的距离id、获得第二分段节点k距离几何路网a
→d→e→
b距离最近的第一分段节点b之间的距离kb,距离ha、距离id以及距离kb都小于预设距离阈值,将第二分段节点h的位置转换为几何路网a
→d→e→
b的第一分段节点a重合、第二分段节点i的位置转换为几何路网a
→d→e→
b的第一分段节点d重合以及第二分段节点k的位置转换为几何路网a
→d→e→
b的第一分段节点b重合;获得第二分段节点j距离几何路网a
→d→e→
b距离最近的第一分段节点e之间的距离je、第二分段节点l距离几何路网a
→d→e→
b距离最近的第一分段节点b之间的距离lb、第二分段节点m距离几何路网a
→d→e→
b距离最近的第一分段节点b之间的距离mb;若距离je、距离lb、距离mb都大于预设距离阈值的,确定第二分段节点j、k、l、m为目标分段节点;将目标分段节点作为几何路网a
→d→e→
b的新增节点,按照各目标分段节点对应在第二行车轨迹hn上的行进顺序,对几何路网a
→d→e→
b的更新,最后获得如图7所示的目标几何路网a
→d→
e(
→
j)
→b→
l
→m→
n。
61.本技术的技术方案,通过获取第一行车轨迹;根据预设划分条件和所述第一行车轨迹,获得所述第一行车轨迹的几何路网;获取第二行车轨迹:若所述第二行车轨迹与所述几何路网匹配,根据所述第二行车轨迹以及所述预设划分条件对所述几何路网进行更新。因此,采用本技术的上述方法,基于廉价可得的行车轨迹数据,快速高效的自动生成道路的几何路网信息,提高了地图未覆盖区域道路几何路网信息更新的效率,以便用户获取地图未覆盖区域道路的几何路网信息创建该区域的地图。
62.请参阅图8,其示出了本发明的一个实施例提供的生成几何路网的装置,所述装置200包括:第一行车轨迹获取单元210、几何路网获取单元220、第二行车轨迹获取单元230以及几何路网更新单元240。具体地,第一行车轨迹获取单元210,用于获取第一行车轨迹;几何路网获取单元220,用于根据预设划分条件和所述第一行车轨迹,获得所述第一行车轨迹的几何路网;第二行车轨迹获取单元230,用于获取第二行车轨迹:几何路网更新单元240,用于若所述第二行车轨迹与所述几何路网匹配,根据所述第二行车轨迹以及所述预设划分条件对所述几何路网进行更新。
63.作为一种实施方式,第一行车轨迹获取单元210,获取预先存储在终端设备的第一行车轨迹。
64.几何路网获取单元220,获取第一行车轨迹中的两个端点,将该两个端点连接形成第一直线;获取所述第一行车轨迹中到所述第一直线距离最远的第一轨迹点,计算所述第一轨迹点与所述第一直线之间的第一距离;获取所述第一轨迹点与所述两个端点分别连接后与所述第一直线形成的两个夹角;若所述第一距离大于预设距离偏差阈值,或存在一个夹角大于预设角度偏差阈值,则满足预设划分条件,将所述第一轨迹点作为一个第一分段节点;将该第一分段节点与所述两个端点之间的行车轨迹作为新的第一行车轨迹并返回执行获取第一行车轨迹中的两个端点,将该两个端点连接形成第一直线的步骤,直至所述第一距离不大于所述预设距离偏差阈值且不存在夹角大于所述预设角度偏差阈值时,得到多个第一分段节点;按照各所述第一分段节点对应在第一行车轨迹上的行进顺序,依次连接各所述第一分段节点,得到所述第一行车轨迹的几何路网。
65.第二行车轨迹获取单元230,通过无线通信技术从相关联的云端获取第二行车轨迹。
66.几何路网更新单元240,若所述第二行车轨迹中存在与所述几何路网的第一分段
节点之间的距离小于预设距离阈值的轨迹点,所述第二行车轨迹与所述几何路网匹配;获取第二行车轨迹中的两个端点,将该两个端点连接形成第二直线;获取所述第二行车轨迹中到所述第二直线距离最远的第二轨迹点,计算所述第二轨迹点与所述第二直线之间的第二距离;获取所述第二轨迹点与所述两个端点分别连接后与所述第二直线形成的两个夹角;若所述第二距离大于预设距离偏差阈值,或存在一个夹角大于预设角度偏差阈值,则满足预设划分条件,将所述第二轨迹点作为一个第二分段节点;将该第二分段节点与所述两个端点之间的行车轨迹作为新的第二行车轨迹并返回执行获取第二行车轨迹中的两个端点,将该两个端点连接形成第二直线的步骤,直至所述第二距离不大于所述预设距离偏差阈值且不存在夹角大于所述预设角度偏差阈值时,得到多个第二分段节点;将几何路网按照所述第二分段节点对应在第二行车轨迹上的行进顺序,依次连接各所述第二分段节点,得到更新后的几何路网。
67.需要说明的是,本说明书的各个实施例均采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似的部分互相参见即可。对于装置类实施例而言,由于其与方法实施例基本相似,所以描述的比较简单,相关之处参见方法实施例的部分说明即可。对于方法实施例中的所描述的任意的处理方式,在装置实施例中均可以通过相应的处理模块实现,装置实施例中不再一一赘述。
68.请参阅图9,基于上述的一种几何路网生成的方法,本技术还提供的另一种包括可以执行前述一种几何路网生成的方法的处理器的电子设备300,电子设备300还包括一个或多个处理器310、存储器320以及一个或多个应用程序。其中,该存储器320中存储有可以执行前述实施例中内容的程序,而处理器310可以执行该存储器320中存储的程序。其中,电子设备300包括车辆或机器人。
69.其中,处理器310可以包括一个或者多个用于处理数据的核以及消息矩阵单元。处理器310利用各种接口和线路连接整个电子设备内的各个部分,通过运行或执行存储在存储器320内的指令、程序、代码集或指令集,以及调用存储在存储器320内的数据,执行电子设备300的各种功能和处理数据。
70.可选地,处理器310可以采用数字信号处理(digitalsignal processing,dsp)、现场可编程门阵列(field-programmable gate array,fpga)、可编程逻辑阵列(programmable logic array,pla)中的至少一种硬件形式来实现。处理器310可集成中央处理器(central processing unit,cpu)、图像处理器(graphics processingunit,gpu)和调制解调器等中的一种或几种的组合。其中,cpu主要处理操作系统、用户界面和应用程序等;gpu用于负责显示内容的渲染和绘制;调制解调器用于处理无线通信。可以理解的是,上述调制解调器也可以不集成到处理器中,单独通过一块通信芯片进行实现。
71.存储器320可以包括随机存储器(random access memory,ram),也可以包括只读存储器(read-onlymemory)。存储器320可用于存储指令、程序、代码、代码集或指令集。存储器320可包括存储程序区和存储数据区,其中,存储程序区可存储用于实现操作系统的指令、用于实现至少一个功能的指令(比如获取第一行车轨迹等)、用于实现下述各个方法实施例的指令等。存储数据区还可以存储终端在使用中所创建的数据(比如第一行车轨迹、几何路网、第二行车轨迹)等。
72.图10是本技术一实施例提供的一种生成几何路网的方法的应用场景示意图,该方
法应用于包括车辆f1和服务器f2的路网生成系统,其中,该系统中的车辆f1可以是多台,图中仅示出了一台车辆。
73.每台车辆f1可以通过网络与服务器f2通信,网络可以是广域网或者局域网,或者是二者的组合。当利用该路网生成系统生成几何路网时,车辆f1在行进过程中采集第一行车轨迹以及第二行车轨迹,并通过网络发送至服务器f2。服务器f2根据预设划分条件和所述第一行车轨迹,获得所述第一行车轨迹的几何路网;若所述第二行车轨迹与所述几何路网匹配,根据所述第二行车轨迹以及所述预设划分条件对所述几何路网进行更新。在服务器f2完成对几何路网的更新之后,还可以将生成的几何路网反馈至车辆f1。
74.请参阅图11,其示出了本技术一实施例提供的一种计算机可读存储介质400的结构框图。该计算机可读存储介质400中存储有程序代码410,所述程序代码410可被处理器调用执行上述方法实施例中所描述的方法。
75.计算机可读存储介质400可以是诸如闪存、eeprom(电可擦除可编程只读存储器)、eprom、硬盘或者rom之类的电子存储器。可选地,计算机可读存储介质包括非易失性计算机可读介质。计算机可读存储介质400具有执行上述方法中的任何方法步骤的程序代码410的存储空间。这些程序代码410可以从一个或者多个计算机程序产品中读出或者写入到这一个或者多个计算机程序产品中。程序代码410可以例如以适当形式进行压缩。
76.最后应说明的是:以上实施例仅用以说明本技术的技术方案,而非对其限制;尽管参照前述实施例对本技术进行了详细的说明,本领域的普通技术人员当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不驱使相应技术方案的本质脱离本技术各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。